
技术摘要:
本发明公开了一种带独立位置补偿旋转平台的紧凑型AGV及控制方法,涉及AGV技术领域;为了便于根据实际情况调整货架的姿态;AGV具体包括安装基座、顶升平台、旋转机构和驱动机构,所述旋转机构安装于顶升平台上,且顶升平台位于安装基座的上方,所述旋转机构包括交流伺服 全部
背景技术:
近年来线上消费逐渐普及,电商的崛起促进了仓储业和物流业的发展,而仓储系 统中频繁的货物搬运与存取对效率有着很高的要求。这些要求对于AGV车体主要体现在: 1.车型紧凑、低矮,适合物流仓库的应用; 2.具备顶升货架的功能,可以背负货架行走。普通的牵引式AGV车体或货架可能比较 长,移动不够灵活; 3.在AGV姿态不变的情况下,具备调整货架姿态的能力; 4.在货架姿态不变的情况下,具备调整AGV姿态的能力。 经检索,中国专利申请号为CN201610055696.7的专利,公开了一种AGV的自主式交 通管制方法,所述方法包括:AGV-A获取路口标识,依据该路口标识判断AGV-A是否处于管制 区域;AGV-A判断出其处于管制区域时,通过短距离通信模块向其他AGV发送第一交通消息; AGV-A接收AGV-B发送的第二交通消息;AGV-A依据所述路口标识B判断AGV-B与AGV-A处于同 一管制区时,获取所述线路A与所述线路B是否有交叉点;如线路A与线路B具有交叉点且第 二交通消息接收时间早于第一交通消息的发送时间时,AGV-A实施交通管制,并将AGV-B的 标识存储在管制池M区内。上述专利存在以下不足:AGV行驶时,不能够根据实际情况调整货 架的姿态,以至于可能出现行驶占用空间较大,互相之间发生碰撞等问题。
技术实现要素:
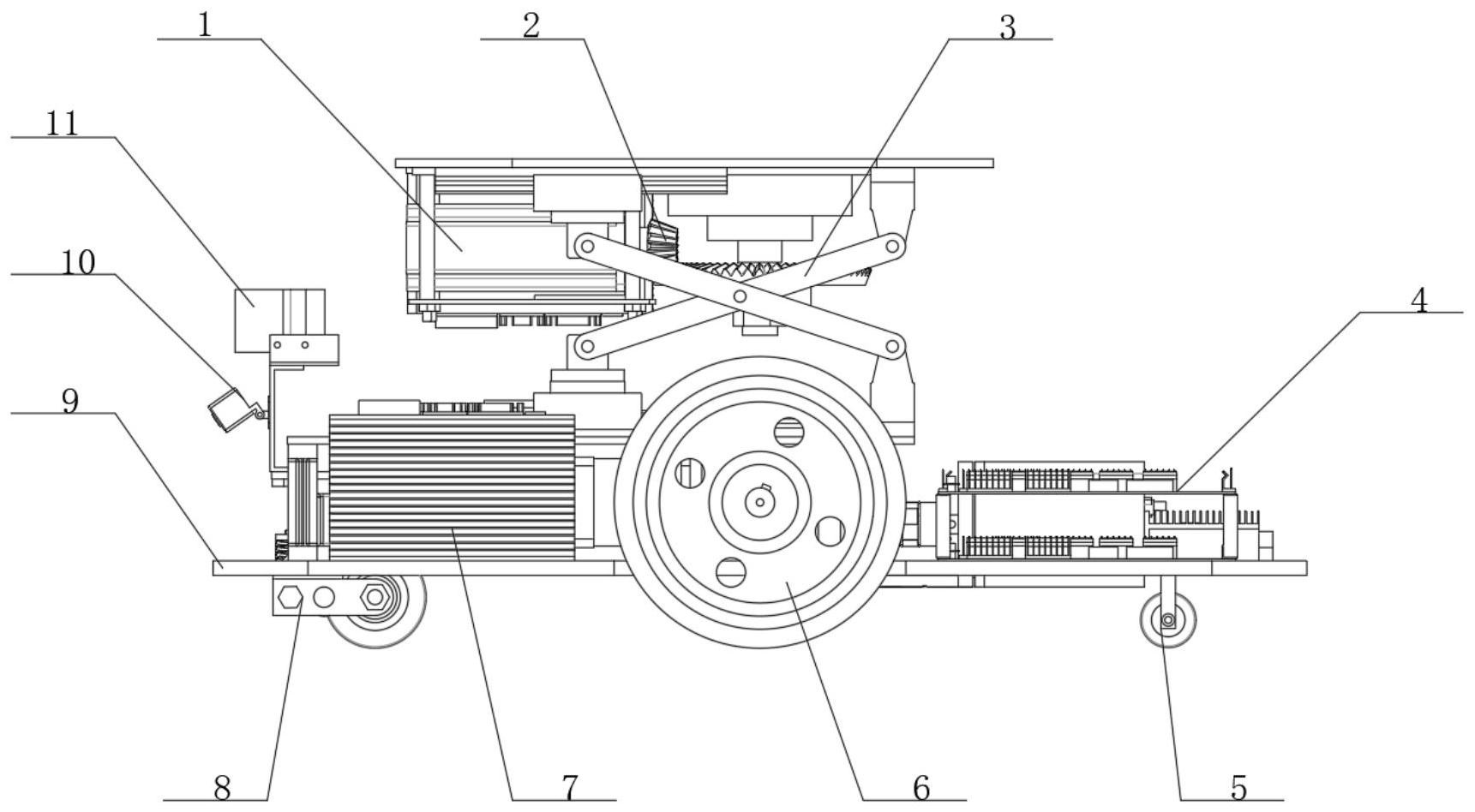
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种带独立位置补偿 旋转平台的紧凑型AGV。 为了实现上述目的,本发明采用了如下技术方案: 一种带独立位置补偿旋转平台的紧凑型AGV,包括安装基座、顶升平台、旋转机构和驱 动机构,所述旋转机构安装于顶升平台上,且顶升平台位于安装基座的上方,所述旋转机构 包括交流伺服旋转电机、旋转托盘传动齿轮和托盘连接支撑板;所述交流伺服旋转电机的 输出端通过旋转托盘传动齿轮转动连接于托盘连接支撑板的底部外壁;所述交流伺服旋转 电机底部外壁通过第一电机座安装于顶升平台的底部外壁,所述托盘连接支撑板顶部呈圆 形,且托盘连接支撑板的顶部侧壁通过轴承座转动连接于顶升平台的顶部内壁,所述安装 基座顶部外壁分别通过螺丝固定有控制组件、伺服电机驱动器和蓄电池组件;所述控制组 件包括位置补偿器、状态变换器和控制单元;所述控制组件分别与伺服电机驱动器、蓄电池 组件和交流伺服旋转电机电性连接;所述安装基座与顶升平台之间还设置有升降机构。 优选的:所述升降机构包括剪刀叉控制电机和两组对称的剪刀叉顶升架,每组所 述剪刀叉顶升架的一个杆件的两端分别转动连接有两个剪刀叉驱动滑块,所述剪刀叉驱动 4 CN 111591653 A 说 明 书 2/6 页 滑块内壁均滑动连接有驱动滑轨,所述安装基座顶部外壁通过螺丝固定有两个工字钢;两 个所述驱动滑轨分别关于剪刀叉顶升架中心对称安装于顶升平台底部外壁以及一个工字 钢的顶部外壁;位于下方的两个剪刀叉驱动滑块顶部外壁通过螺丝固定有同一个连接板; 所述剪刀叉控制电机通过第二电机座固定于连接板的底部外壁,所述安装基座顶部外壁通 过螺丝固定有固定件;所述剪刀叉控制电机的输出端通过螺杆连接于固定件的内壁,所述 剪刀叉控制电机与一个伺服电机驱动器和控制组件电性连接。 进一步的:所述驱动机构包括两个驱动轮和控制驱动轮转动的驱动电机;安装基 座两侧外壁开设有容纳驱动轮的矩形槽;两个所述驱动轮对称式安装于安装基座两侧的矩 形槽内;两个所述驱动轮通过齿轮组件转动连接于驱动电机的输出端,驱动电机通过螺丝 固定于安装基座顶部外壁;且驱动电机与一个伺服电机驱动器和控制组件电性连接。 进一步优选的:所述安装基座底部外壁分别通过两个三角钢和两个避震机构安装 有两个辅助轮,两个辅助轮分别位于安装基座底部两侧的中间位置。 作为本发明一种优选的:所述避震机构包括滚轮支架和弹簧组件,两个三角钢分 别通过螺丝固定于安装基座底部外壁,弹簧组件的两端分别焊接于三角钢顶部外壁与滚轮 支架的底部外壁,滚轮支架的中段位于三角钢和弹簧组件内部。 作为本发明进一步优选的:所述安装基座顶部外壁通过安装架安装有摄像头;所 述安装架的侧壁通过螺丝安装有避障传感器;避障传感器和摄像头均与控制组件电性连 接;所述避障传感器为红外传感器。 作为本发明再进一步的方案:所述安装基座的四角位置以及顶升平台的四角位置 均倒有圆角,且AGV整体尺寸为760mm(长)*510mm(宽)*320mm(高)。 一种带独立位置补偿旋转平台的紧凑型AGV的控制方法,包括托盘独立位置补偿 旋转控制方法、学习算法和神经PID随动控制算法,所述托盘独立位置补偿旋转控制方法具 体包括如下步骤: S1:控制组件通过驱动机构控制AGV基于导航运行; S2:控制组件计算托盘相对地面的绝对旋转角速度; S3:计算托盘相对车体旋转的角速度; S4:位置补偿校正; S5:神经PID控制; S6:通过旋转机构对托盘进行旋转。 在前述方案的基础上优选的:所述学习算法的表达式为: 其中, 是神经元系数,一般根据经验法取得; 是角速度偏差; 是旋转平 5 CN 111591653 A 说 明 书 3/6 页 台控制量; 是旋转平台角速度测量值。 在前述方案的基础上进一步优选的:所述神经PID随动控制算法基于位置补偿器 和状态变换器实现,其中位置补偿器公式为: 其中 是补偿后的目标角速度, 是补偿前的目标角速度, 是补偿器 的阈值, 是AGV实际朝向和目标的偏差角度, 是旋转平台角速度的调节系数。 本发明的有益效果为: 1.本发明提高柔性系统搬运效率和仓储系统的存、取效率;同时,由于仓储系统中货物 堆放密集,AGV的尺寸规格要尽可能的小,除此之外,AGV自带旋托机构,通过精确的定位控 制,确保AGV在运行的过程中能够按要求严格的控制车身和搬运货物的相对位置、姿态。 2.本发明的AGV具有顶升货架背负行走的功能,顶升平台上的旋转托盘具有独立 位置补偿旋转的功能,可以满足三种运动形式:AGV安装基座姿态不变,旋转托盘可360旋 转;旋转托盘姿态不变,AGV底盘可360旋转;AGV安装基座和旋转托盘随动;这三种运动形式 可满足仓储AGV在搬运货架过程中的各种复杂的姿态要求。 3.本发明带独立位置补偿可通过带位置补偿输入的神经PID随动控制算法,进行 托盘、货架和AGV底盘的位置姿态调整。 4.通过设置剪刀叉控制电机、剪刀叉驱动滑块和剪刀叉顶升架等结构,达到控制 顶升平台升降的目的;通过设置矩形槽,能够便于把控安装基座的宽度尺寸,利于路径规 划,同时提升了AGV整体行驶的可靠性,避免驱动轮剐蹭、卡死的现象;通过设置弹簧组件等 结构,能够起到减震的效果,进一步提升了行驶的稳定性。 附图说明 图1为本发明提出的一种带独立位置补偿旋转平台的紧凑型AGV的右视图; 图2为本发明提出的一种带独立位置补偿旋转平台的紧凑型AGV立体的结构示意图; 图3为本发明提出的一种带独立位置补偿旋转平台的紧凑型AGV的电路流程图; 图4为本发明提出的一种带独立位置补偿旋转平台的紧凑型AGV的控制方法中神经PID 随动控制算法的结构图; 图5为本发明提出的一种带独立位置补偿旋转平台的紧凑型AGV的控制方法中控制托 盘旋转的流程图; 图6为本发明提出的一种带独立位置补偿旋转平台的紧凑型AGV的控制方法中神经PID 控制的流程图。 图中:1交流伺服旋转电机、2旋转托盘传动齿轮、3剪刀叉顶升架、4控制组件、5辅 助轮、6驱动轮、7伺服电机驱动器、8避震机构、9安装基座、10摄像头、11避障传感器、12弹簧 组件、13剪刀叉控制电机、14连接板、15剪刀叉驱动滑块、16驱动滑轨、17顶升平台、18托盘 6 CN 111591653 A 说 明 书 4/6 页 连接支撑板、19第一电机座、20安装架、21固定件。











