
技术摘要:
本发明提供了一种可穿戴助力柔性外骨骼,包括:固定背板固定在多功能背心上;嵌入式控制系统固定在固定背板上;2个电机模块固定在固定背板腰部上方;2个电机模块与嵌入式控制系统连接;嵌入式控制系统与CAN通信模块连接;电池与嵌入式控制系统和驱动器连接;驱动器与电 全部
背景技术:
外骨骼按其机械结构可分为柔性外骨骼和刚性外骨骼。其中刚性外骨骼发展多 年,已经广泛应用于康复医疗、重物搬运、抢险救援等场合,目前,刚性外骨骼都是采用硬式 外壳,通过机械化的结构给穿戴者提供一定的助力,但95%以上的刚性外骨骼系统因为太 过笨重会造成穿戴者较大的体能消耗,这并不代表外骨骼系统没有提升穿戴者的力量或协 助负重,而是穿着时感觉像行走于水中一般,感受到外骨骼巨大的阻力。相反,柔性外骨骼 因其材质较轻,灵活性较高,在行走助力方面具有更大优势。
技术实现要素:
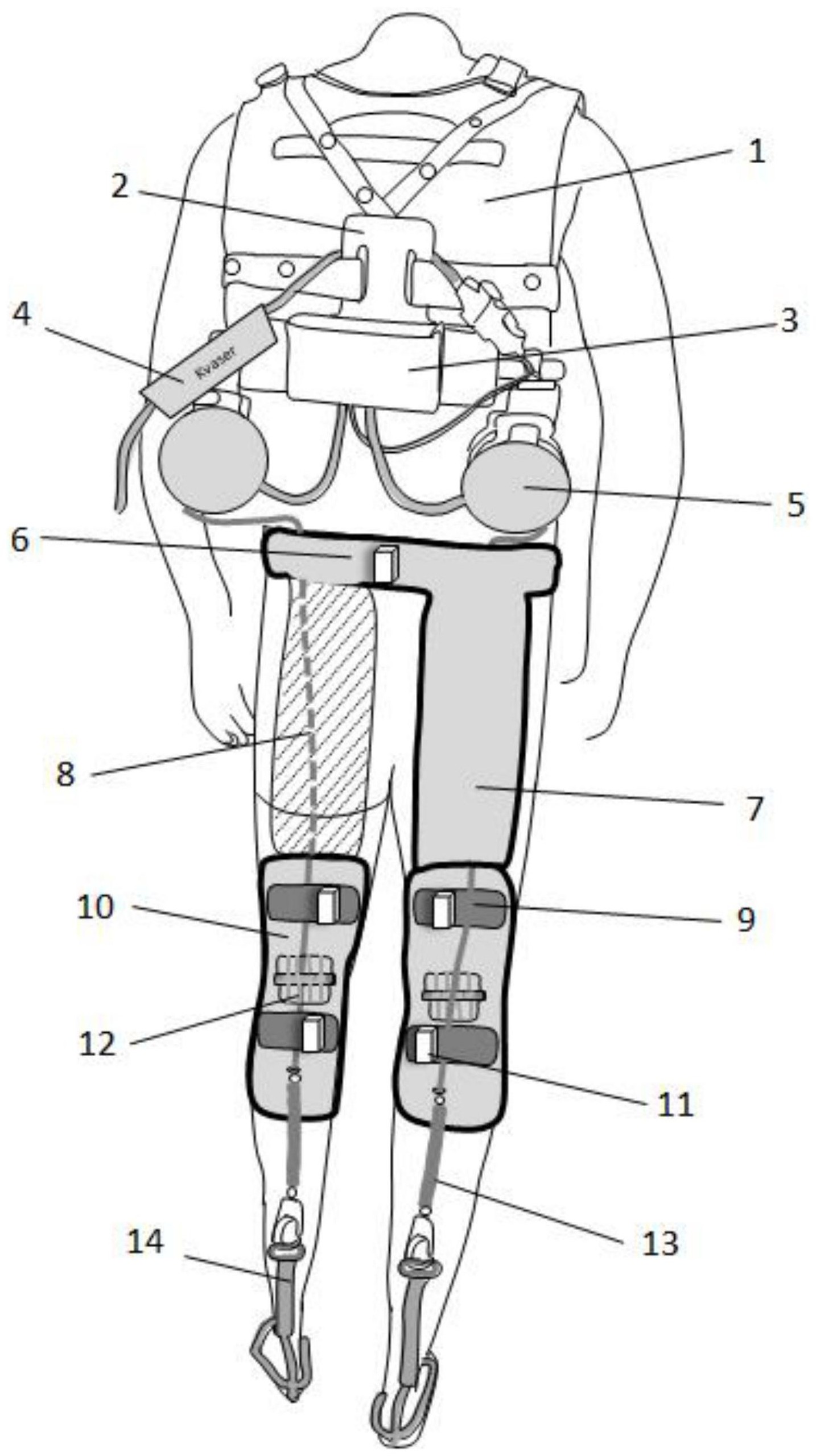
针对现有技术中的缺陷,本发明的目的是提供一种可穿戴助力柔性外骨骼。 根据本发明提供的一种可穿戴助力柔性外骨骼,包括:多功能背心1、固定背板2、 嵌入式控制系统3、CAN通信模块4、电机模块5、腰部绑带6、大腿连接带7、柔索8、膝盖织物套 筒10、姿态传感器11、可伸缩弹簧13、脚套14、驱动器20和电池21; 所述固定背板2固定在所述多功能背心1上; 所述嵌入式控制系统3固定在所述固定背板2上; 所述电机模块5有2个,2个所述电机模块5固定在所述固定背板2腰部上方;2个所 述电机模块5与所述嵌入式控制系统3连接;所述嵌入式控制系统3与所述CAN通信模块4与 连接; 所述电池21与所述嵌入式控制系统3和所述驱动器20连接;所述驱动器20与所述 电机模块5连接,所述电池21给所述嵌入式控制系统3与所述驱动器20供电; 所述柔索8有2根,所述大腿连接带6有2个,所述膝盖织物套筒10有2个,所述脚套 14有2个; 2根所述柔索8分别与2个所述电机模块5连接;2根所述柔索8通过所述腰部绑带6 固定并延伸至下,所述腰部绑带6通过2个所述大腿连接带7分别连接2个所述膝盖织物套筒 10; 所述可调节弹簧13有2个,2根所述柔索8分别通过所述腰部绑带6引导向下沿着所 述大腿连接件7和所述膝盖织物套筒10连接2个所述可调节弹簧13;2个所述可调节弹簧13 连接2个所述脚套14; 所述姿态传感器11固定在包括2个所述膝盖织物套筒10大腿、小腿和/或所述腰部 绑带6后腰位置处。 优选地,所述姿态传感器11有5个,分别通过2个所述膝盖织物套筒10大腿、小腿和 所述腰部绑带6后腰上传感器固顶帖9进行固定;通过所述姿态传感器11获取包括穿戴者在 步行和/或跑步状态下的重心竖直方向加速度和髋关节摆动速度,检测穿戴者的运动意图, 4 CN 111571572 A 说 明 书 2/6 页 计算期望转角。 优选地,所述电机模块5包括:槽轮22、编码器23、谐波减速器24、电机25、旋转轴26 和链接法兰27; 所述编码器23、所述电机25、所述链接法兰27安装在所述旋转轴26上,由所述编码 器23读取实际转角,将实际转角传递给所述嵌入式控制系统3,由所述嵌入式控制系统3将 实际转角与期望转角求取误差,生成期望轨迹;所述嵌入式控制系统3通过所述CAN通信模 块将期望轨迹传输至所述驱动器20,所述驱动器20控制所述电机25,所述电机25再通过所 述旋转轴26传递到所述谐波减速器24,所述谐波减速器24通过所述旋转轴26连接所述槽轮 22,所述柔索8通过所述槽轮22与所述电机25连接; 所述期望转角是根据不同的穿戴者试穿行走之后自行调整的。 优选地,所述弹簧片12有2个,分别安装在膝盖正后方2个所述膝盖织物套筒10的 内部; 所述弹簧板12包括储能弹簧15和固定螺钉16,所述储能弹簧15通过所述固定螺钉 16连接;当膝盖弯曲时,所述弹簧板12两块板夹角变小,所述储能弹簧15被压缩,从而进行 储能,在蹲起或跳跃的瞬间,为穿戴者提供助力。 优选地,所述CAN通信模块4与所述嵌入式控制系统3通过CAN总线方式进行通信传 输,所述嵌入式控制系统3通过所述CAN总线给所述驱动器20发送CAN指令,所述驱动器20驱 动电机模块5转动从而带动所述柔索8拉伸或者缩短。 优选地,所述柔索8从硬质软管内部穿过,即保证了所述柔索8伸缩的自由性,又保 证了人体行动的灵活性。 优选地,所述电池21和所述驱动器20放置于所述多功能背心1胸前口袋内部。 优选地,所述嵌入式控制系统3和所述驱动器20在一起并用外壳进行封装,所述嵌 入式控制系统3包括上位机和下位机的嵌入式控制系统,所述上位机与所述下位机进行通 讯,穿戴者在进行运动时,所述嵌入式控制系统下位机将人体的运动数据上传至服务器,嵌 入式控制系统上位机将运动数据进行保存,穿戴者根据数据进行步态调整。 优选地,所述可伸缩弹簧13包括2根带圆环螺栓18和弹力软管19,所述可伸缩弹簧 13的长度通过转动圆环螺栓18进行调节。 优选地,所述膝盖织物套筒10前方膝盖处加厚处理,做护膝使用,在上距离行走过 程中减少膝盖损伤。 与现有技术相比,本发明具有如下的有益效果: 1、本发明膝盖组件的织物套筒后部嵌入了弹簧板,可在穿戴者蹲起或者跳跃时提 供一定的助力,且套筒本身也可作护膝使用。 2、本发明利用姿态传感器实时获取穿戴者在步行和跑步状态下的重心竖直方向 加速度和髋关节摆动速度,检测穿戴者的意图,将期望转角,送入控制装置进行轨迹规划, 从而调整电机输出力矩大小。 3、本发明采用柔性外骨骼,系统的活动部位不仅极度轻量化,甚至还省去了最具 象征性且重量巨大的外骨骼构架,系统的成本、重量、耗电量较低,同时结构也更为简单,完 全贴合人体穿戴,不影响活动幅度和关节伸展角度,适合具有长距离行走工作或户外长途 旅行使用; 5 CN 111571572 A 说 明 书 3/6 页 4、本发明穿脱方便,上身组件只需穿上多功能背心,固定好插扣,然后穿上膝盖套 筒和脚套,再固定腰部绑带,最后通过小腿处的弹簧调节柔索长度即可; 5、整个系统完全区别于传统刚性外骨骼,除多功能背心外,整体材料均为柔软可 任意折叠,尤其是膝盖套筒和柔索,完全贴合人体关节,无任何束缚之感,可随穿戴者动作 任意变化,几乎适应于任何身材,且助力效果明显,可将人的体能消耗降低15%~20%。 附图说明 通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显: 图1为本发明的整体结构示意图; 图2为基于神经网络的的下肢位姿识别算法框图; 图3为本发明的背部组件局部图; 图4为本发明的膝盖组件局部图; 图5为本发明的小腿组件局部图; 图6为本发明的电机与踝关节连接图; 图7为本发明电机模块局部图; 图8为本发明驱动器和控制系统局部图; 其中,1-多功能背心、2-固定背板、3-嵌入式控制系统、4-CAN通信模块、5-电机模 块、6-腰部绑带、7-大腿连接带、8-柔索、9-传感器固定贴、10-膝盖织物套筒、11-姿态传感 器、12-弹簧板、13-可伸缩弹簧、14-脚套、15-储能弹簧、16-固定螺钉、17-传感器固定贴、 18-伸缩螺钉、19-弹力软管、20-驱动器、21-电池、22-槽轮、23-编码器、24-谐波减速器、25- 电机、26-旋转轴、27-链接法兰。











