
技术摘要:
本发明实施例公开一种重定位质量评估方法、装置及计算机存储介质,该方法包括:在进行重定位质量评估时,首先获得机器人重定位的目标局部地图,然后将目标局部地图与全局地图中的待匹配地图进行分区匹配,获得各个分区的分区匹配得分,如果存在超过第一预设数值的小于 全部
背景技术:
随着科学技术的飞速发展,智能设备已经广泛被应用至人们的日常生活中,为人 们生活带来极大的便利。许多可移动的智能设备(如:扫地机器人)由于人为移动或设备重 启等原因,面临重定位问题。在重定位时,机器人通常会在启动位置自转一周,基于单线激 光雷达建立局部概率栅格地图,并与已有的全局地图进行匹配,对局部地图上每个匹配上 的栅格,按照全局地图上的最近点距离给与不同的权重,计算权重和得到匹配得分。一方 面,由于局部地图包含的信息较少,可能在全局地图的多个局部均能够得到较好的匹配结 果。另一方面,激光雷达测量误差可能造成局部地图有较大误差,特别是在较为空旷的大尺 度室内环境,会导致局部地图在全局都得不到较好的匹配结果,因此需要对匹配质量做进 一步准确评估。
技术实现要素:
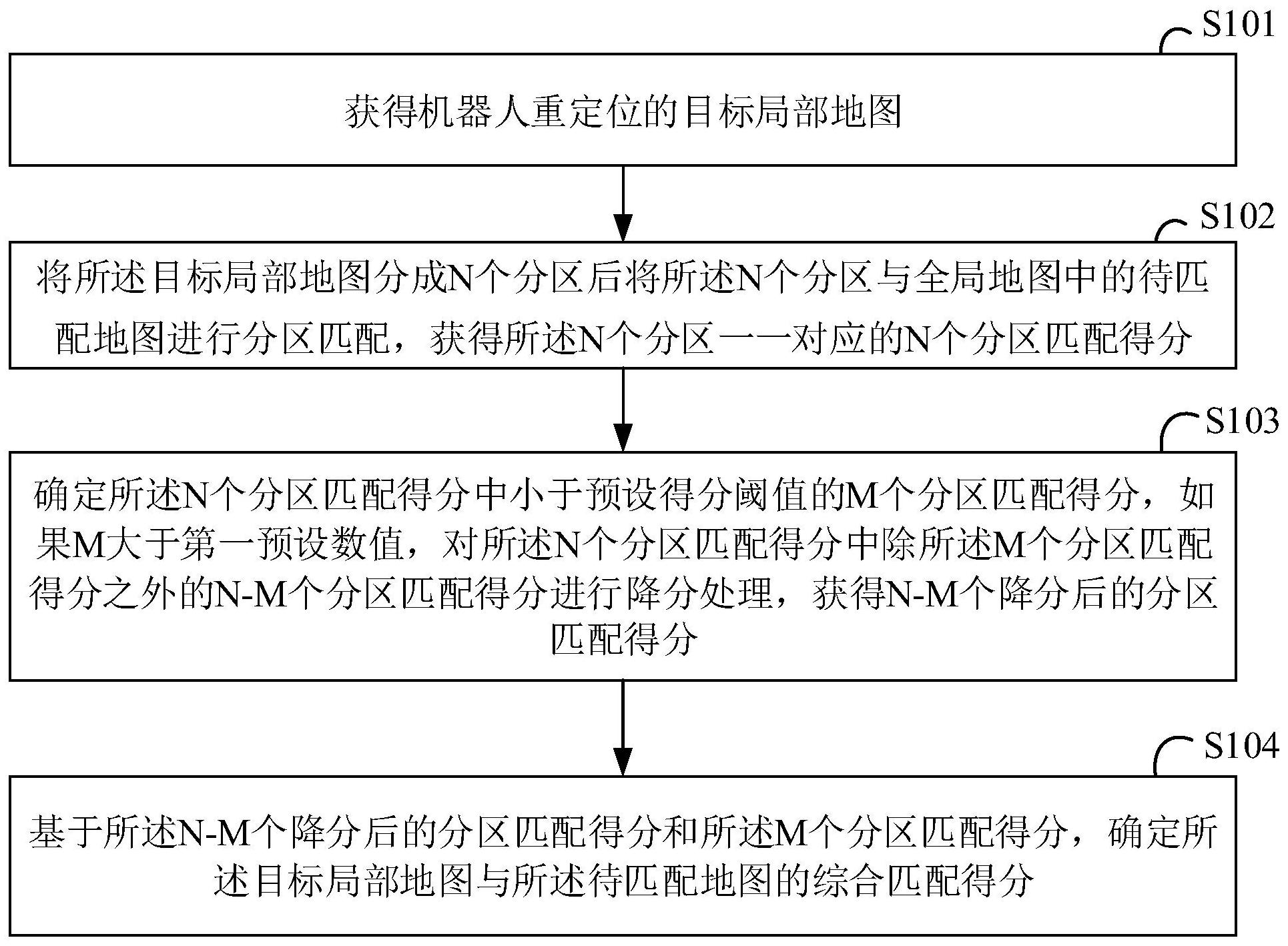
鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上 述问题的重定位质量评估方法、装置及计算机存储介质。 第一方面,本实施例提供一种重定位质量评估方法,包括: 获得机器人重定位的目标局部地图; 将所述目标局部地图分成N个分区后将所述N个分区与全局地图中的待匹配地图 进行分区匹配,获得所述N个分区一一对应的N个分区匹配得分,其中,N为大于1的整数; 确定所述N个分区匹配得分中小于预设得分阈值的M个分区匹配得分,如果M大于 第一预设数值,对所述N个分区匹配得分中除所述M个分区匹配得分之外的N-M个分区匹配 得分进行降分处理,获得N-M个降分后的分区匹配得分; 基于所述N-M个降分后的分区匹配得分和所述M个分区匹配得分,确定所述目标局 部地图与所述待匹配地图的综合匹配得分,所述综合匹配得分用于表示所述目标局部地图 与所述待匹配地图的匹配程度,所述综合匹配得分越高,所述目标局部地图与所述待匹配 地图的匹配程度越高。 可选的,所述获得机器人重定位的目标局部地图,包括: 获得机器人重定位的初始局部地图; 将所述初始局部地图在预设尺度范围内进行P次等间隔缩放,获得P个局部地图, 将所述P个局部地图中每个局部地图依次作为目标局部地图。 可选的,所述将所述目标局部地图分成N个分区后将所述N个分区与全局地图中的 待匹配地图进行分区匹配,获得所述N个分区一一对应的N个分区匹配得分,包括: 对所述目标局部地图进行Q次分区,每次分区均以所述机器人当前位置为中心,将 4 CN 111583308 A 说 明 书 2/14 页 上一次分区得到的N个分区绕所述当前位置向同一方向旋转预设旋转角度后形成本次分区 对应的N个分区,其中,初始的N个分区为以所述当前位置为中心,按预设中心角度间隔对所 述目标局部地图进行划分形成,所述预设旋转角度与所述预设中心角度不相等; 针对每次分区,将此次分区得到的N个分区与所述待匹配地图进行分区匹配,获得 与所述N个分区一一对应的N个分区匹配得分。 可选的,所述方法还包括: 以所述机器人当前位置为中心,在所述全局地图遍历与所述目标局部地图匹配的 占据栅格; 基于所述占据栅格的位置信息,对所述目标局部地图对应的综合匹配得分进行校 正。 可选的,在所述以所述机器人当前位置为中心,在所述全局地图遍历与所述目标 局部地图匹配的占据栅格之前,所述方法还包括: 获得与所述P个局部地图一一对应的P个综合匹配得分; 将所述P个综合匹配得分由大致小排序后确定出前K个综合匹配得分; 判断所述目标局部地图对应的综合匹配得分是属于所述K个综合匹配得分; 如果是,则执行步骤:以所述机器人当前位置为中心,在所述全局地图遍历与所述 目标局部地图匹配的占据栅格。 可选的,所述方法还包括: 获得所述K个综合匹配得分一一对应的K个校正后的综合匹配得分; 基于所述K个校正后的综合匹配得分,确定与所述待匹配地图对应的目标综合匹 配得分。 可选的,所述基于所述占据栅格的位置信息,对所述目标局部地图对应的综合匹 配得分进行校正,包括: 针对每个占据栅格,如果该占据栅格的中心与所述机器人当前位置的连线上存在 的连续占据栅格个数超过第二预设数值,降低所述连续占据栅格的匹配权重,重新确定与 所述目标局部地图对应的综合匹配得分。 第二方面,本实施例还提供一种重定位质量评估装置,包括: 获取单元,用于获取获得机器人重定位的目标局部地图; 匹配单元,用于将所述目标局部地图分成N个分区后将所述N个分区与全局地图中 的待匹配地图进行分区匹配,获得所述N个分区一一对应的N个分区匹配得分,其中,N为大 于1的整数; 处理单元,用于确定所述N个分区匹配得分中小于预设得分阈值的M个分区匹配得 分,如果M大于第一预设数值,对所述N个分区匹配得分中除所述M个分区匹配得分之外的N- M个分区匹配得分进行降分处理,获得N-M个降分后的分区匹配得分; 评估单元,用于基于所述N-M个降分后的分区匹配得分和所述M个分区匹配得分, 确定所述目标局部地图与所述待匹配地图的综合匹配得分,所述综合匹配得分用于表示所 述目标局部地图与所述待匹配地图的匹配程度,所述综合匹配得分越高,所述目标局部地 图与所述待匹配地图的匹配程度越高。 可选的,所述获取单元具体用于: 5 CN 111583308 A 说 明 书 3/14 页 获得机器人重定位的初始局部地图; 将所述初始局部地图在预设尺度范围内进行P次等间隔缩放,获得P个局部地图, 将所述P个局部地图中每个局部地图依次作为目标局部地图。 可选的,所述匹配单元具体用于: 对所述目标局部地图进行Q次分区,每次分区均以所述机器人当前位置为中心,将 上一次分区得到的N个分区绕所述当前位置向同一方向旋转预设旋转角度后形成本次分区 对应的N个分区,其中,初始的N个分区为以所述当前位置为中心,按预设中心角度间隔对所 述目标局部地图进行划分形成,所述预设旋转角度与所述预设中心角度不相等; 针对每次分区,将此次分区得到的N个分区与所述待匹配地图进行分区匹配,获得 与所述N个分区一一对应的N个分区匹配得分。 可选的,所述装置还包括校正单元,所述校正单元具体用于: 以所述机器人当前位置为中心,在所述全局地图遍历与所述目标局部地图匹配的 占据栅格; 基于所述占据栅格的位置信息,对所述目标局部地图对应的综合匹配得分进行校 正。 可选的,所述装置还包括判断单元,所述判断单元具体用于: 在所述以所述机器人当前位置为中心,在所述全局地图遍历与所述目标局部地图 匹配的占据栅格之前,获得与所述P个局部地图一一对应的P个综合匹配得分; 将所述P个综合匹配得分由大致小排序后确定出前K个综合匹配得分; 判断所述目标局部地图对应的综合匹配得分是属于所述K个综合匹配得分; 如果是,则执行步骤:以所述机器人当前位置为中心,在所述全局地图遍历与所述 目标局部地图匹配的占据栅格。 可选的,所述评估单元还用于: 获得所述K个综合匹配得分一一对应的K个校正后的综合匹配得分; 基于所述K个校正后的综合匹配得分,确定与所述待匹配地图对应的目标综合匹 配得分。 可选的,所述校正单元具体用于: 针对每个占据栅格,如果该占据栅格的中心与所述机器人当前位置的连线上存在 的连续占据栅格个数超过第二预设数值,降低所述连续占据栅格的匹配权重,重新确定与 所述目标局部地图对应的综合匹配得分。 第三方面,本发明实施例还提供一种重定位质量评估装置,包括处理器和存储器: 所述存储器用于存储执行前述第一方面的所述重定位质量评估方法的程序;所述处理器被 配置为用于执行所述存储器中存储的程序。 第四方面,本发明实施例还提供一种计算机存储介质,其特征在于,用于储存为前 述第一方面的所述重定位质量评估方法所用的计算机软件指令,其包含用于执行上述方面 为自适应传输方法所设计的程序。 本申请实施例中的上述一个或多个技术方案,至少具有如下一种或多种技术效 果: 在本发明实施例的技术方案中,在进行重定位质量评估时,首先获得机器人重定 6 CN 111583308 A 说 明 书 4/14 页 位的目标局部地图,然后将目标局部地图与全局地图中的待匹配地图进行分区匹配,获得 各个分区的分区匹配得分,如果存在超过第一预设数值的小于预设得分阈值的分区匹配得 分,表明该待匹配地图与目标局部地图在某几个方向上匹配得不好,而在其余方向上的匹 配得分的置信度不高,对其进行降分处理,这样,该待匹配地图与目标局部地图的整体匹配 得分也会降低,表明该待匹配地图与目标局部地图的匹配程度不高,能对此次匹配的质量 进行较为准确评估。进而在重定位时,能够根据全局地图中各待匹配地图的综合匹配得分, 过滤掉分值较低的产生干扰的待匹配地图,提高重定位的准确度。 附图说明 通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通 技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明 的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中: 图1为本发明第一实施例中的应用于前端设备的重定位质量评估方法的流程图; 图2为本发明第二实施例中的一种重定位质量评估装置的示意图; 图3为本发明第三实施例中的一种重定位质量评估装置的示意图。











