
技术摘要:
一种用于将容器(100)在其升降到处理区域中期间进行定心、优选地用于在饮料灌装设备中填充和/或封闭容器(100)的装置(1)和方法,其中,所述装置(1)具有:定心部段(10),所述定心部段(10)具有收纳部段(11),所述定心部段(10)设置成在其至少一个部段上收纳所述容器(100); 全部
背景技术:
用于在饮料灌装设备中灌装填充产品的各种方法和装置中,已知一种用于容器的 冲击式填充的技术,该技术例如在DE102014104873A1中作了描述。在此,提供了处于超压下 的填充产品,该超压将待填充容器抽真空并且将处于超压下的填充产品导入到处于欠压下 的容器中。由于如此建立的压力差而几乎冲击式进行填充产品的导入。 为了缩短填充产品在填充后在容器中的沉降时间并防止起泡和溢泡,封闭处于超 压下的容器,而不用事先进行容器内部空间与外部环境的压力平衡。 为此,如从DE102014104873A1的实施例中明显看出,通过将填充机构和封闭器布 置在同一个处理室中,在空间和时间上尽可能地集成填充过程和封闭过程是有意义的。在 这里,填充机构实施成可移动,其中,首先将容器口部按压在填充机构上以填充容器,然后 移除填充机构,以便为封闭器腾出空间。 为了执行上述的冲击式填充和封闭的集成过程,待填充且待封闭的容器由升降装 置从下方垂直移入到处理室中,从而至少容器的口部区域密封位于处理室中。容器相对于 填充机构的定心借助填充机构下方的定心环针对填充过程进行。在这里,定心环针对每个 填充/关闭循环通过所谓的钟形罩升降曲线而升高并朝着容器降低,以便随后与容器一起 朝填充机构上移。 定心环的运动顺序是通过凸轮控制器来实现的并因此需要自身的致动器/控制组 件。此外,不仅空的、仍待填充的容器而且已填充容器都必须从定心环下方运输经过。在此, 填充产品的溢泡或溢出会导致定心环污染。
技术实现要素:
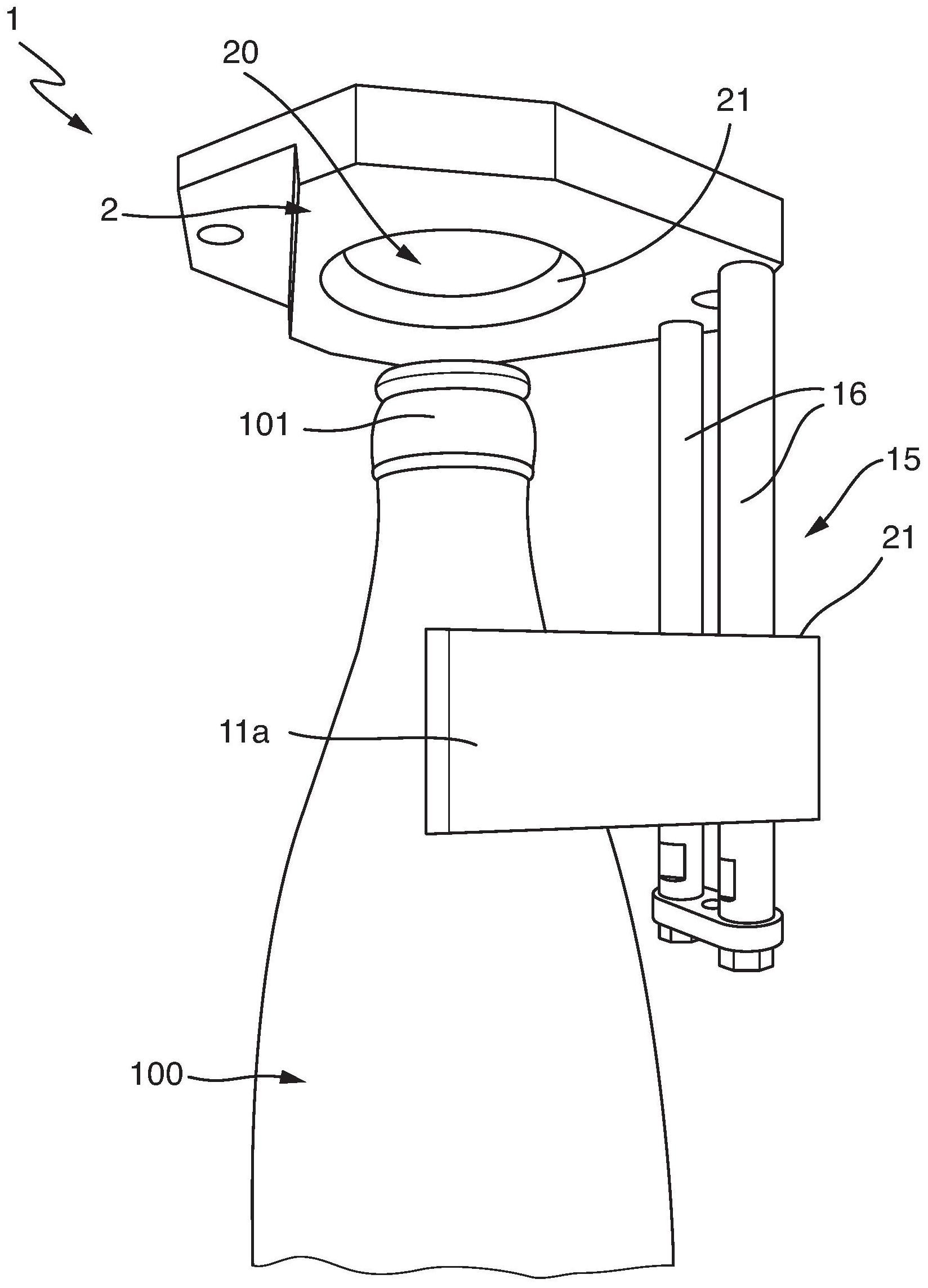
本发明的目的是改善容器运输,尤其是定心,用于容器处理,优选地用于在饮料灌 装设备中填充和/或封闭容器。 该目的通过具有本发明特征的一种装置和具有本发明特征的一种方法来实现。有 利的改进方案从本发明的以下说明书以及优选的实施例的描述中得出。 因此,提出了一种装置,其具有定心部段,所述定心部段具有收纳部段,所述定心 部段设置成在其至少一个部段上收纳容器。所述装置还具有引导部段,所述引导部段设置 成在用于收纳所述容器的收纳位置和用于在处理区域中处理所述容器的处理位置之间沿 限定轨迹引导所述定心部段的平移运动。 所提出的装置用于将容器在其升降到处理区域中期间进行定心。在所述处理区域 中待执行的处理优选地包括:用填充产品、优选为饮料填充所述容器,和/或用封闭件封闭 所述容器。所提出的装置优选地是饮料灌装设备的一部分。 4 CN 111573592 A 说 明 书 2/6 页 因此,所述收纳部段用于将所述容器在其升降到所述处理区域中期间进行暂时稳 定和定心。在瓶例如玻璃瓶或塑料瓶的情况下,瓶颈优选地由所述收纳部段收纳或至少部 分地包围。所述引导部段确保的是,所述容器在其升降期间被对准,使得所述容器可靠且精 确地移动到期望的处理位置并因此尤其是相对于处理机构定心。 所述装置允许将所述容器在其移入到所述处理区域中期间进行定心,而无须将所 述容器从常规的定心环下方下沉经过。可以省略用于移动这种定心环的致动器,例如凸轮 控制器。在此,大致被动地进行定心,即通过以下方式将来自升降运动的力协同地用于定 心,即所述定心部段由所述容器向上按压,并且所述容器以此方式自身在所述收纳部段中 对准。另外,用于移入和移出所述处理室的所需升降被最小化,由此可以减小处理角度,即 用于处理(例如用于填充和/或封闭)所述容器的运输转盘必须经过的角度。所述设备可以 总体上形成得更紧凑并且在结构上得到简化。因此,也减少了维护消耗量和维护成本。可以 消除可能的错误源,由此提高了可靠性。 优选地,所述处理区域位于处理室中,所述处理室具有室壁,所述室壁具有开口, 其中,所述定心部段和所述引导部段设置成将所述容器的至少一部分、优选为其口部部段 在升降期间通过所述开口引入到所述处理室中。在此,所述室壁优选地是下室壁,因为所述 容器通常由升降装置从下方垂直移入到所述处理室中。在此,空间名称“下方”、“垂直”、“重 力方向”、“升降”等基于所述装置的安装位置清楚地确定。 所述容器的处理,尤其是所述容器的填充和/或封闭,优选地在所述处理室的密封 气氛中,优选在超压下进行。在冲击式填充的情况下,提供处于超压下的填充产品,该超压 将输送到处理位置的容器抽真空并将处于超压下的填充产品导入到处于欠压下的容器中。 为了缩短填充产品在冲击式填充后在所述容器中的沉降时间并防止起泡和溢泡,封闭处于 超压下的容器,而不用事先进行容器内部空间与外部环境的压力平衡。优选地,通过将填充 机构和封闭器至少部分地布置在所述处理室中,将填充过程和封闭过程在空间和时间上集 成在所述处理室中。在这里,填充机构可以实施成可移动,其中,首先将容器口部按压在填 充机构上以填充容器,然后移除填充机构,以便为封闭器腾出空间。从上面对冲击式填充的 描述中可以看出,所述用于定心的装置特别优选地与可以与外部环境密封的处理室一起使 用,因为在该情况下将所述容器始终精确地运输到所需的处理位置是非常重要的。 优选地,所述引导部段安置在所述室壁上,由此,所述用于定心的装置和所述处理 室在结构上是集成的。 优选地,密封环位于所述室壁的所述开口中,所述密封环设置成在所述容器的引 入状态下,即在处理位置处,如此围绕容器部段放置,使得所述处理室的内部空间对此,即 至少在开口处,相对于外部环境密封。这样,不仅可以将所述处理室的内部空间与外部环境 密封,而无须将整个容器移入到所述处理室中,而且所述密封件在此承担用于定心的辅助 功能。 优选地,形成所述开口的所述壁具有凸形轮廓以保持所述密封环。所述凸形轮廓 可以接合到所述密封环的外圆周上的相应凹槽中以收纳和固定所述密封环,由此可以使密 封环在结构上简单且安全地保持。 优选地,所述容纳部段具有轮廓,所述轮廓与相应的、即待收纳的容器轮廓一致, 由此所述容器可以安全且位置精确地定心。优选地,所述收纳部段具有锥形轮廓,由此所述 5 CN 111573592 A 说 明 书 3/6 页 收纳部段尤其是适合于瓶颈。 优选地,所述收纳部段具有夹紧件形状,所述夹紧件形状具有两个夹紧臂,所述两 个夹紧臂形成开环,由此所述夹紧臂可以围绕相应的容器部段,例如瓶颈。在此,优选地,所 述夹紧臂在180°和220°之间、优选为大约200°的角度范围内形成分度环。这样,所述容器可 以移入到所述处理区域中的接近处理机构的高度处并且安全地保持。由此使所述容器朝所 述处理机构、例如填充机构的升降最小化,使得所述容器尽快地准备好处理。 优选地,所述定心部段具有运输部段,所述运输部段与所述引导部段如此配合,使 得所述定心部段可沿限定的、优选为直线的轨迹平移移动。为此,所述运输部段可以具有至 少一个开口,所述引导部段至少部分地穿过所述开口,使得所述定心部段可沿所述引导部 段移动。这样,可以以结构简单和可靠的方式实现用于使容器定心的引导运输。 优选地,所述运输部段具有至少两个开口,并且所述引导部段具有至少两个附属 的引导杆,所述引导杆相应地穿过所述相应开口。所述两个引导杆优选地平行且在所述装 置的安装状态下从下室壁大致垂直向下延伸。通过使用两个或更多个引导杆,以结构简单 的方式确保防止所述定心部段围绕所述引导杆的轴线旋转。不过,也可以以技术上不同的 方式来实现限定引导和防止不期望的自由度,例如借助具有多边形横截面的引导杆,该引 导杆与具有相应多边形横截面的运输部段的开口配合。 优选地,所述定心部段偏置到所述收纳位置。为此,所述装置可以具有一个或多个 弹簧,所述一个或多个弹簧例如作为螺旋弹簧围绕所述引导杆布置并且支撑在所述室壁和 所述定心部段上。在该情况下,所述定心部段和/或所述室壁优选地具有用于收纳或部分收 纳压缩弹簧的相应开口或凹陷部。这样确保的是,所述定心部段可移动到处理位置,而不会 使在所述弹簧在定心部段和下室壁之间干扰运输。如果仅由于重力使定心部段返回到收纳 位置是易受干扰的或需要太多时间,则指向收纳位置的偏置可以提高所述装置的可靠性。 如上所述,在本文中所述的定心装置可以应用在用于处理容器、特别优选地用于 在饮料灌装设备中用填充产品填充容器和/或用封闭件封闭容器的装置中。 上述的目的还通过一种用于将容器在其升降到处理区域中期间进行定心、优选地 用于在饮料灌装设备中填充和/或封闭容器的方法来实现的,其中,所述方法具有:将定心 部段布置在收纳位置处;将所述容器引入到收纳部段中,所述收纳部段位于所述接收位置 处,使得所述收纳部段在其一个部段上至少部分地包围所述容器;借助升降装置将所述容 器提升到处理位置,由此所述定心部段由所述容器驱动并由所述引导部段引导而也提升, 并且通过所述收纳部段实现所述容器的定心。 应指出的是,术语“围绕”、“包围”,“包括”等在本文中不一定暗示通过收纳部段的 主动的抓握运动,因为定心作用也通过被动的收纳部段、即例如用于容器的不变的凹部来 实现。 以上关于所述装置所描述的技术作用、优点和实施方式类似地适用于所述方法。 本发明的其他优点和特征从以下优选实施例的描述中将变得显而易见。在此描述 的特征可以单独实现,或者与上述一个或多个特征组合实现,只要这些特征不冲突即可。在 这里,参照附图对优选实施例进行以下描述。 6 CN 111573592 A 说 明 书 4/6 页 附图说明 通过下面的附图描述来更详细地说明本发明的其他优选实施方式。在附图中: 图1示出了用于将容器在升降到处理区域中时进行定心的装置,其中没有容器; 图2示出了图1的装置,其中所收纳的容器处于在进入到处理区域中之前的状态 下; 图3示出了图1的装置,其中所收纳的容器处于在进入到处理区域中之后的状态 下; 图4从不同的视角示出了图1的装置,其中所收纳的容器处于图2的状态下。











