
技术摘要:
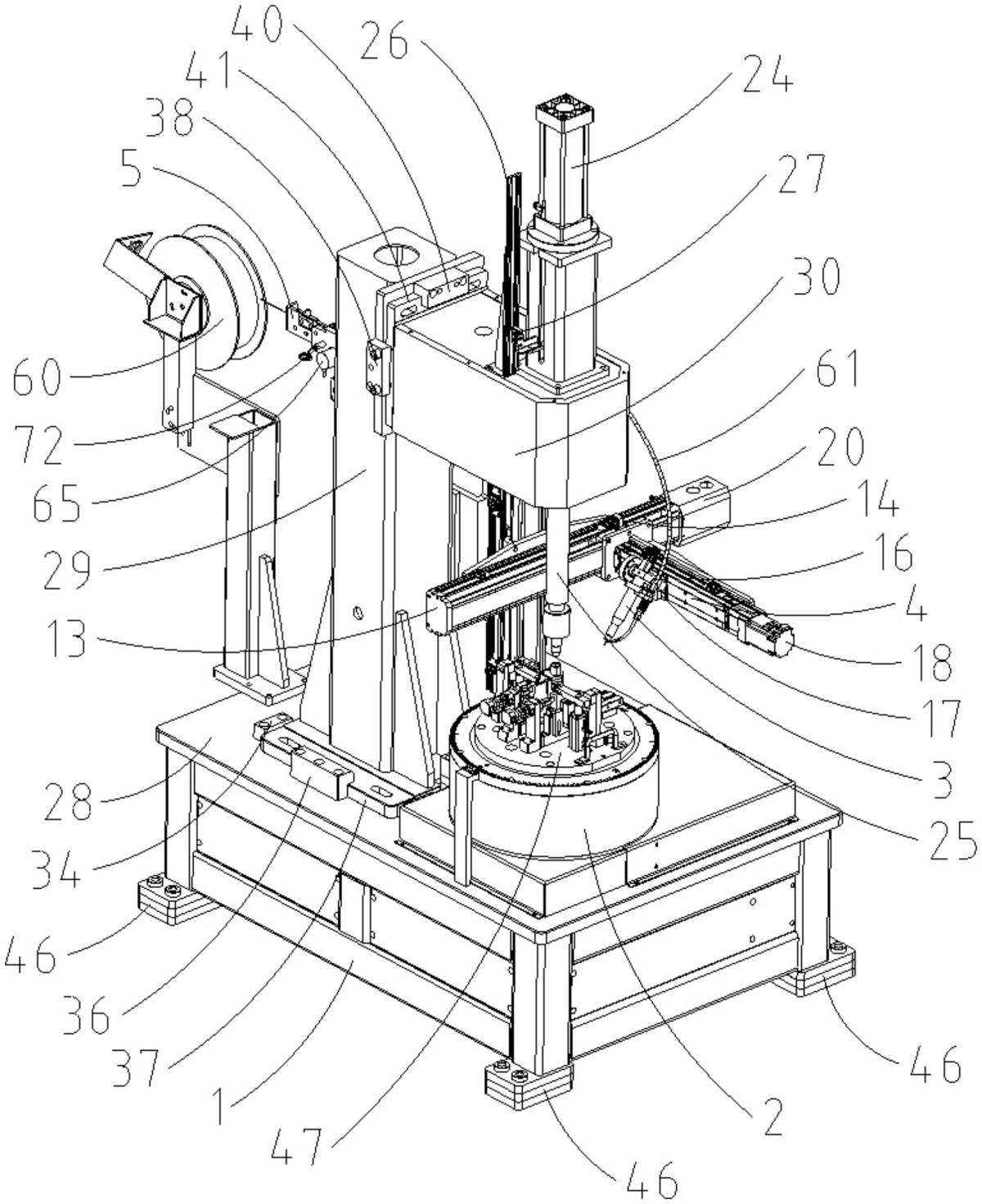
本发明公开了一种五轴焊接机器人,它包括机架、工作台、旋转驱动机构、焊枪、移动装置和送丝装置;所述工作台旋转连接在所述机架上并用于安装工件;所述旋转驱动机构与所述工作台相连并用于动作以驱动所述工作台转动;所述焊枪连接在所述移动装置上;所述移动装置连接 全部
背景技术:
目前,为了提高焊接的效率,降低人工成本,焊接机器人在焊接领域中得到普遍应 用。但是,现有的焊接机器人仅能焊接简单的焊缝,无法焊接复杂的焊缝,并且现有的焊接 机器人焊接精度低,焊接质量差,在工作过程中经常会出现焊接死角。
技术实现要素:
本发明所要解决的技术问题是克服现有技术的缺陷,提供一种五轴焊接机器人, 它能够焊接复杂的焊缝,没有焊接死角,能够提高焊接的精度和焊接的质量。 为了解决上述技术问题,本发明的技术方案是:一种五轴焊接机器人,它包括机 架、工作台、旋转驱动机构、焊枪、移动装置和送丝装置;其中, 所述工作台旋转连接在所述机架上并用于安装工件; 所述旋转驱动机构与所述工作台相连并用于动作以驱动所述工作台转动; 所述焊枪连接在所述移动装置上; 所述移动装置连接在所述机架上并用于动作以带动所述焊枪移动,以使所述焊枪在移 动过程中焊接所述工作台上的工件; 所述送丝装置连接在所述机架上并用于动作以向所述焊枪输送焊丝。 进一步提供一种所述移动装置的具体方案,所述移动装置包括X向移动机构、Y向 移动机构和Z向移动机构;其中, 所述Z向移动机构包括: 连接在所述机架上的Z向座; 沿Z向滑动连接在所述Z向座上的Z向滑块; 旋转连接在所述Z向座上并与所述Z向滑块螺纹连接的Z向丝杠; 连接在所述Z向座上的Z向电机,所述Z向电机与所述Z向丝杠相连并用于驱动所述Z向 丝杠旋转进而带动所述Z向滑块滑动; 所述X向移动机构包括: 连接在所述Z向滑块上的X向座; 沿X向滑动连接在所述X向座上的X向滑块; 旋转连接在所述X向座上并与所述X向滑块螺纹连接的X向丝杠; 连接在所述X向座上的X向电机,所述X向电机与所述X向丝杠相连并用于驱动所述X向 丝杠旋转进而带动所述X向滑块滑动; 所述Y向移动机构包括: 连接在所述X向滑块上的Y向座; 沿Y向滑动连接在所述Y向座上的Y向滑块; 6 CN 111545869 A 说 明 书 2/10 页 旋转连接在所述Y向座上并与所述Y向滑块螺纹连接的Y向丝杠; 连接在所述Y向座上的Y向电机,所述Y向电机与所述Y向丝杠相连并用于驱动所述Y向 丝杠旋转进而带动所述Y向滑块滑动; 所述焊枪连接在所述Y向滑块上。 进一步为了能够焊接不同形状结构的焊缝,所述焊枪通过旋转块连接在所述Y向 滑块上;其中, 所述焊枪连接在所述旋转块上; 所述旋转块旋转连接在所述Y向滑块上; 所述Y向滑块上设有第一刻度; 所述旋转块上设有与所述第一刻度适配以指示所述旋转块的角度位置的第一指针。 进一步为了测量所述工件的纵向位置,所述五轴焊接机器人还包括连接在所述机 架上并用于动作以测量所述工作台上的工件的纵向位置的测量装置,所述测量装置包括气 缸、测量杆和磁栅尺,所述磁栅尺包括磁条和磁头;其中, 所述测量杆沿纵向滑动连接在所述机架上; 所述磁条连接在所述机架上; 所述磁头连接在所述测量杆上; 所述气缸安装在所述机架上并与所述测量杆相连,所述气缸用于动作以驱动所述测量 杆向下运动至与所述工件相抵,进而带动所述磁头相对所述磁条移动以测得所述工件的纵 向位置。 进一步提供一种所述机架的具体结构,所述机架包括底座、立柱、横梁、第一调节 机构和第二调节机构;其中, 所述立柱沿前后方向滑动连接在所述底座上; 所述第一调节机构连接在所述底座上并与所述立柱相连,所述第一调节机构用于被动 作以带动所述立柱沿前后方向滑动并当所述立柱滑动到位时锁定所述立柱的位置; 所述横梁沿左右方向滑动连接在所述立柱上; 所述第二调节机构连接在所述立柱上并与所述横梁相连,所述第二调节机构用于被动 作以带动所述横梁沿左右方向滑动并当所述横梁滑动到位时锁定所述横梁的位置。 进一步提供一种所述第一调节机构和所述第二调节机构的具体方案,所述第一调 节机构包括至少一个前固定块、与所述前固定块对应的前螺栓、至少一个后固定块、与所述 后固定块对应的后螺栓以及至少一个第一压板,所述立柱的下端部设有第一法兰部;其中, 所述前固定块和所述后固定块均连接在所述底座上,所述立柱滑动连接在所述前固定 块和后固定块之间; 所述前固定块上设有前连接孔,所述前螺栓的杆部穿过对应的前固定块中的前连接孔 后螺纹连接在所述立柱上,所述前螺栓的头部抵接在所述前固定块上,以便通过旋拧所述 前螺栓以带动所述立柱向前滑动; 所述后固定块上设有后连接孔,所述后螺栓的杆部穿过对应的后固定块中的后连接孔 后螺纹连接在所述立柱上,所述后螺栓的头部抵接在所述后固定块上,以便通过旋拧所述 后螺栓以带动所述立柱向后滑动; 所述第一压板通过第一螺栓连接在所述底座上,并用于当所述立柱滑动到位时将所述 7 CN 111545869 A 说 明 书 3/10 页 第一法兰部压紧在所述底座上以锁定所述立柱的位置; 所述第二调节机构包括至少一个左固定块、与所述左固定块对应的左螺栓、至少一个 右固定块、与所述右固定块对应的右螺栓以及至少一个第二压板,所述横梁的一端部设有 第二法兰部;其中, 所述左固定块和所述右固定块均连接在所述立柱的上端部,所述横梁滑动连接在所述 左固定块和右固定块之间; 所述左固定块上设有左连接孔,所述左螺栓的杆部穿过对应的左固定块中的左连接孔 后螺纹连接在所述横梁上,所述左螺栓的头部抵接在所述左固定块上,以便通过旋拧所述 左螺栓以带动所述横梁向左滑动; 所述右固定块上设有右连接孔,所述右螺栓的杆部穿过对应的右固定块中的右连接孔 后螺纹连接在所述横梁上,所述右螺栓的头部抵接在所述右固定块上,以便通过旋拧所述 右螺栓以带动所述横梁向右滑动; 所述第二压板通过第二螺栓连接在所述立柱的上端部并用于当所述横梁滑动到位时 将所述第二法兰部压紧在所述立柱上以锁定所述横梁的位置。 进一步,所述五轴焊接机器人还包括电焊机以及连接在所述机架上的导电机构, 所述导电机构包括安装块、弹性件和导电块;其中, 所述安装块绝缘连接在所述机架上; 所述导电块滑动连接在所述安装块上并与所述电焊机的正极和负极中的任意一个电 性相连; 所述弹性件设于所述安装块和所述导电块之间并用于推动所述导电块抵接在所述工 作台的侧壁上; 所述焊枪绝缘连接在所述移动装置上并与所述电焊机的正极和负极中的剩余一个电 性相连; 所述机架与地面之间绝缘连接。 进一步,所述工件通过工装连接在所述工作台上,所述工装中设有气动元件和/或 电气元件;所述工作台上还连接有旋转接头;所述气动元件通过所述旋转接头与外部气源 相连和/或所述电气元件通过所述旋转接头与外部电源相连; 和/或所述工作台的外周部上还设有第二刻度,所述机架上连接有用于与所述第二刻 度配合以指示所述工作台的角度位置的第二指针。 进一步为了避免焊接产生的有害气体外溢,所述五轴焊接机器人还包括罩壳,所 述机架、工作台、旋转驱动机构、焊枪、移动装置和送丝装置均设于所述罩壳中;其中, 所述罩壳的后端部设有至少一个电器柜; 和/或所述罩壳的左、右两端分别设有侧门; 和/或所述罩壳的前端部设有正门; 和/或所述罩壳的上端部设有气体出口; 和/或所述罩壳的内部还连接有摄像装置,所述罩壳的外部连接有显示装置,所述显示 装置与所述摄像装置相连并用于显示摄像装置拍摄的画面。 进一步提供一种所述送丝装置的具体方案,所述送丝装置中设有送丝通道,所述 送丝装置包括送丝盘、送丝管、动力机构、测速机构和校直机构;其中, 8 CN 111545869 A 说 明 书 4/10 页 所述送丝通道设于所述送丝盘和所述送丝管之间; 所述送丝盘上卷绕有焊丝; 所述送丝管的一端部连接在所述焊枪上,所述送丝盘上的焊丝的一端部穿过所述送丝 通道后伸入所述送丝管,并穿过所述送丝管后延伸至所述焊枪; 所述动力机构设于所述送丝盘和所述送丝管之间,所述动力机构用于夹住所述送丝通 道中的焊丝并输送所述焊丝向所述焊枪移动; 所述校直机构设于所述动力机构和所述送丝盘之间并用于校直所述送丝通道中的焊 丝; 所述测速机构设于所述动力机构和所述送丝盘之间,所述测速机构用于夹住所述送丝 通道中的焊丝并测量所述焊丝的移动速度。 采用了上述技术方案后,所述Z向电机驱动所述Z向丝杠旋转时能够带动所述Z向 滑块滑动,进而能带动所述焊枪沿Z向移动;所述X向电机驱动所述X向丝杠旋转时能够带动 所述X向滑块滑动,进而能带动所述焊枪沿X向移动;所述Y向电机驱动所述Y向丝杠旋转时 能够带动所述Y向滑块滑动,进而能带动所述焊枪沿Y向移动;再配合所述工作台旋转时带 动所述工件旋转,使得所述焊枪能够焊接各种形状结构的复杂的焊缝,焊接过程中没有焊 接死角,还提高了复杂焊缝的焊接精度和焊接质量。 并且所述气缸能够驱动所述测量杆向下运动至与所述工件相抵,进而带动所述磁 头相对所述磁条移动以测得所述工件的纵向位置,进而提高了所述工件焊接完成后的尺寸 精度。 并且所述电焊机的正极与负极之间通过所述焊枪、工件、工作台和导电块形成短 路,进而通过所述焊枪焊接所述工件。其中,所述安装块与机架绝缘连接、焊枪与移动装置 绝缘连接、机架与地面绝缘连接,能够避免焊接过程中对所述移动装置和旋转驱动机构等 伺服系统产生电磁干扰,进而提高了所述移动装置和旋转驱动机构的动作精度,进一步提 高了复杂焊缝的焊接精度和质量。 附图说明 图1为本发明的五轴焊接机器人的正面的结构示意图; 图2为本发明的五轴焊接机器人的背面的结构示意图; 图3为本发明的五轴焊接机器人的焊枪的结构示意图; 图4为本发明的五轴焊接机器人的剖视图; 图5为本发明的五轴焊接机器人的第一调节机构的结构示意图; 图6为本发明的五轴焊接机器人的工作台和导电机构的结构示意图; 图7为本发明的五轴焊接机器人的工作台的外部结构示意图; 图8为本发明的五轴焊接机器人的送丝装置的结构示意图; 图9为本发明的五轴焊接机器人的罩壳的结构示意图。











