
技术摘要:
一种适用于机械手在手操作的目标参数检测方法,所述方法包括步骤一:完成机械臂、机械手和传感器的标定及初始化;步骤二:控制机械臂和机械手的运动,检验是否可以完成特定运动;步骤三:利用力/力矩传感器检测机械手在竖直自由状态和限定偏转状态下的待测目标受力信息 全部
背景技术:
随着机器人技术的快速发展,机器人已广泛应用于各行各业。以工业生产行业和 服务行业为例,机器人通常会面临大量的目标抓取和操作等任务。对于未知场景下的机器 人而言,作业目标的参数通常是未知的,如目标质量和质心。目标质量和质心位置是作业目 标的基本参数,对机械手的参数配置,特别是抓取力、抓取点和闭合程度等参数的配置,直 接关系到机器人能否成功抓取未知目标并完成相关操作。如何在机器人对目标进行操作的 过程中对目标的参数进行准确地检测,特别是目标的质量和质心位置参数,目前该机器人 技术领域的在手检测方法较少。 公开号CN108818586A公开的一种适用于机械手自动抓取的物体重心检测方法提 出对物体进行两次抓取,利用滑觉传感器检测物体在提升过程中的旋转情况,根据夹持力 矩和摩擦力矩平衡原理实现对物体的重心检测。虽然该方法理论上可以检测物体的重心位 置,具有一定可行性,但是该方法需要对目标进行二次操作且物体的旋转过程为非可控过 程,物体重心的检测准确性和检测效率很难得到保证。此外,公开号CN204958193U公开的集 装箱重量及重心位置检测设备上的悬挂称重装置、公开号CN101852639A公开的一种移动终 端称量物体重量的方法、系统及移动终端、公开号CN107449552A公开的重心检测方法及装 置和公开号CN104136900A公开的重心位置检测装置、重心位置检测方法及程序等,虽然也 涉及质量检测或重心检测,但是所述检测方法为静态检测方法,即检测装置固定安装于地 面或其他静止平台,待测物品静置于检测装置之上进行检测。机器人系统作为一个动态系 统,上述静态检测方法并不适用于动态系统下的机械手对未知目标的抓取和操作。 综上所述,针对机器人的目标抓取和操作领域,迫切需要一种机器人对目标参数 的快速在手检测,特别是质量和质心位置的检测,来提升机器人对作业目标的适应性和灵 巧作业能力。
技术实现要素:
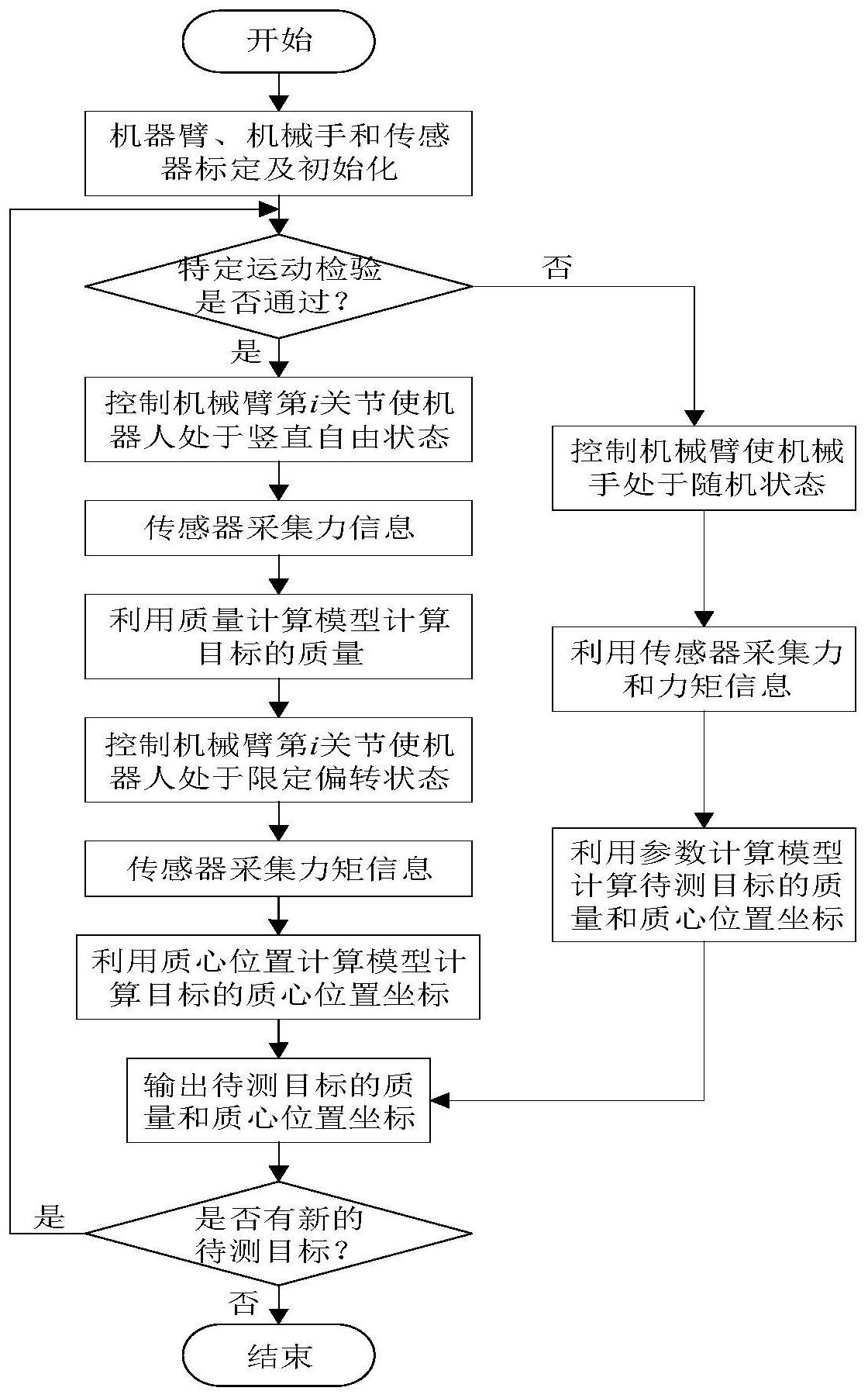
本发明为克服现有技术不足,提出一种适用于机械手在手操作的目标参数检测方 法。该检测方法通过在机械手指尖安装力/力矩传感器,检测机器人抓取待测目标后的受力 状态,利用参数计算模型计算待测目标的质量和质心位置。该检测方法弥补了机器人对目 标参数检测能力的不足,同时填补了机器人对目标进行在手检测方法的空白,有助于提高 机器人对未知目标的检测和灵巧操作能力。 本发明的技术方案如下: 步骤一:完成机械臂、机械手和传感器的标定及初始化; 步骤二:控制机械臂和机械手的运动,检验是否可以完成特定运动:若通过特定运 5 CN 111604900 A 说 明 书 2/5 页 动检验,则执行步骤三;若未通过特定运动检验,则执行步骤四; 步骤三:利用力/力矩传感器检测机械手在竖直自由状态和限定偏转状态下的待 测目标受力信息,通过参数计算模型计算待测目标的质量和质心位置; 步骤四:利用力/力矩传感器检测机械手处于随机状态下的待测目标受力信息,通 过参数计算模型计算待测目标的质量和质心位置; 步骤五:机器人完成当前待测目标的质量和质心位置检测后,如进行新目标的参 数检测,需执行步骤二进行特定运动检验,并依据检验通过情况,进一步执行步骤三或步骤 四,计算新目标的质量和质心位置。 本发明相比现有技术的有益效果是: 一、本发明目标参数检测方法,可以解决面向机器人在手操作领域的目标参数的 检测较为困难的问题,特别是实现机器人对目标的质量和质心位置的在手检测。机器手在 抓取目标之后,需要对目标进行任务操作,而机械手对目标的操作过程依赖于目标的质量 和质心位置。本发明可以基于机械手抓取目标时的受力信息,利用质量计算模型和质心位 置计算模型的质量和质心位置进行检测,为机械手顺利完成操作任务提供支撑。具体检测 模型包括:目标的质量计算模型是利用力传感器检测待测目标的受力情况,基于力平衡条 件计算待测目标的质量;目标的质心位置计算模型是利用力矩传感器检测待测目标的所受 力矩情况,基于力矩平衡条件计算待测目标的质心位置。 二、本发明的目标参数检测方法可以实现机器人在手检测目标参数,特别是机械 手在抓取目标后,机器人可以根据机械手处的受力信息计算出在手目标的质量和质心位 置,进而配置机械手的运动参数顺利完成操作任务。本发明系统结构简单,适用于机器人对 目标进行抓取和操作的领域,且本发明所提检测方法可以对未知参数的目标进行质量和质 心位置检测,提升了机器人对未知目标的抓取和操作能力。 三、本发明在一定程度上可以提升机器人的自主感知和灵巧作业能力,特别是机 器人对未知目标的参数识别和智能操作能力,对服务、工业生产、危险物品处置等场景下机 器人智能处理未知目标具有较大的实用价值。 下面结合附图并通过











