
技术摘要:
本发明公开了一种基于无人水面艇的多海湾区域路径遍历方法及系统。在该方法中,无人水面艇沿锯齿形路径行进,在行进过程中,采用雷达实时扫描无人水面艇周围是否存在海湾,当探测到海湾后,判断该海湾是否位于无人水面艇的行进侧,当海湾位于无人水面艇的行进侧时,则 全部
背景技术:
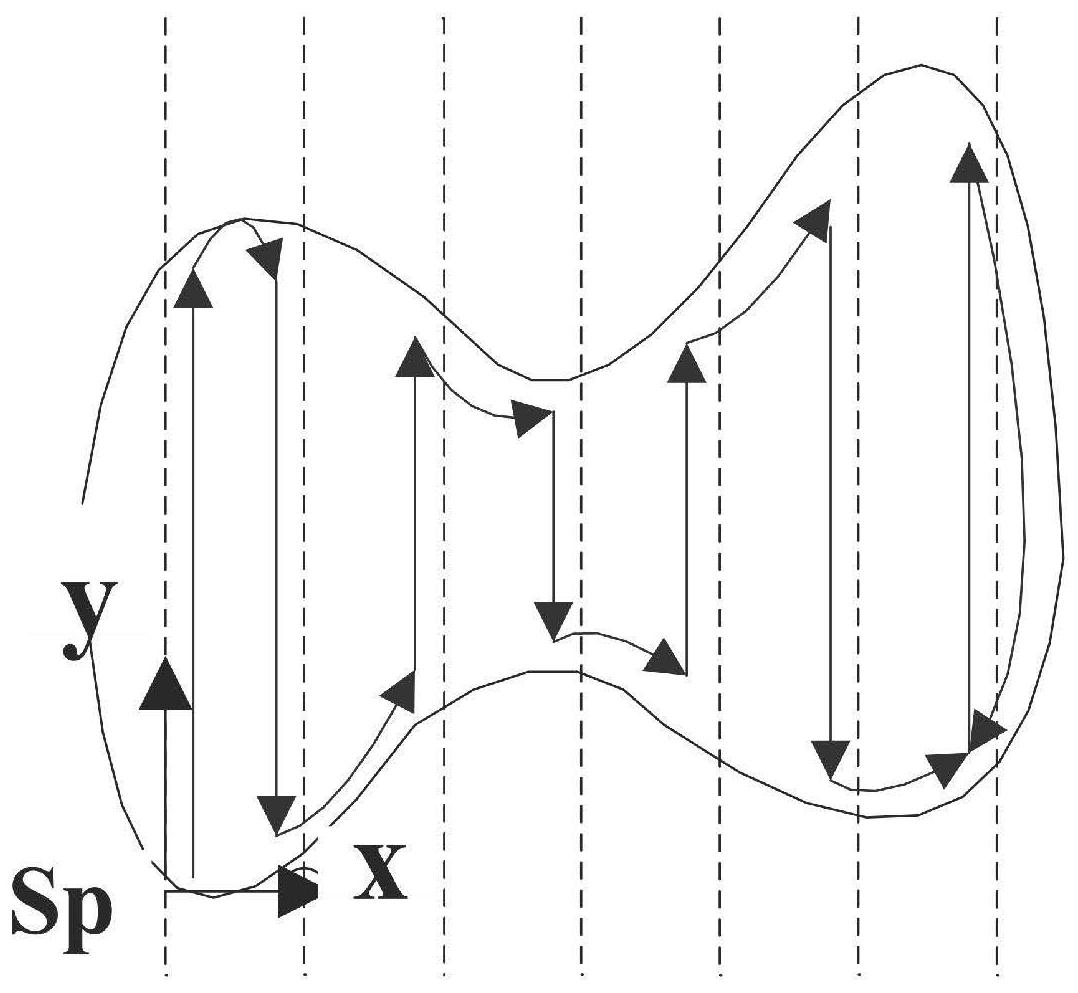
多海湾地形是指有多于两个海湾的封闭区域,此种地形多存在于岛礁海域和深海 复杂地形区域。 无人水面艇在开阔水域搜索时,常规的遍历方法是选择计算量小的锯齿形路径规 划方法获取相关水域的水文信息。利用这种简单的锯齿形搜索方式对二维规则边界的地形 可以达到期望的覆盖率和较短的航程,如图1,选定一个靠近搜索水域一侧的边界作为起点 Sp,建立直角坐标系,并根据无人水面艇附带声呐的探测宽度ω以及考虑到海底地形起伏 对探测设备的地形覆盖搜索宽度的影响,利用栅格法建立任务环境地图。纵向栅格线的横 坐标值规定为x=iω/2(i为栅格线编号,栅格线间距为ω/2)。无人水面艇从起始点开始沿 着栅格线运行,每当无人水面艇声呐探测到边界时,无人水面艇将会向着x轴正方向转向, 沿着水域边界寻找下一条栅格线。寻找到下一条栅格线后,无人水面艇将沿着这条栅格线 搜索下去,直到搜索完全部区域为止。 将无人水面艇整体趋势向x轴正方向在栅格线上往返前进的行为定义为锯齿形路 径规划行为。 当搜索水域存在多海湾时,简单的锯齿形路径规划将会导致搜索遗漏或者重复搜 索的现象。如图2,无人水面艇从Sp点出发,使用图1所示的行为进行搜索,搜索完中间区域 后进入I2区域,搜索完I2区域后,无人水面艇将沿着I2区域内的栅格线返回,然后再进入I3 区域,搜索完I3区域后会发现:在整个搜索过程中I2区域重复搜索而I1区域被遗漏。
技术实现要素:
本发明的目的是提供一种基于无人水面艇的多海湾区域路径遍历方法及系统,能 够避免遍历中海湾的遗漏和重复。 为实现上述目的,本发明提供了如下方案: 一种基于无人水面艇的多海湾区域路径遍历方法,所述无人水面艇在多海湾区域 沿锯齿形路径运动,所述锯齿形路径为基于锯齿形路径规划方法建立的路径,所述锯齿形 路径由栅格以及区域边界构成,所述方法包括: 控制所述无人水面艇沿所述锯齿形路径运动,并启动雷达对所述无人水面艇周围 的环境进行实时扫描: 根据所述雷达的扫描信息确定所述无人水面艇周围是否存在海湾; 如果存在海湾,则判断所述海湾是否位于所述无人水面艇的行进侧,所述行进侧 为与所述锯齿形路径整体趋向方向相同的一侧; 如果所述海湾不位于所述无人水面艇的行进侧,则选取与所述海湾边界相交的栅 5 CN 111580517 A 说 明 书 2/7 页 格线中距离所述无人水面艇的当前位置最近的一条栅格线作为第一栅格线,并将所述第一 栅格线与所述海湾边界的交点之一记为遗漏海湾的进入点,将所述海湾记为遗漏海湾; 如果所述海湾位于所述无人水面艇的行进侧,则选取与所述海湾边界相交的栅格 线中距离所述无人水面艇的当前位置最近的一条栅格线作为第二栅格线,并将所述第二栅 格线与所述海湾边界的交点之一记为重复海湾的退出点,将所述海湾记为重复海湾; 当所述无人水面艇遍历完所述重复海湾后,从所述重复海湾的湾底直接行驶至所 述重复海湾的退出点,并从所述重复海湾的退出点退出所述重复海湾; 当所述无人水面艇探测到所述遗漏海湾后,从所述遗漏海湾的进入点进入所述遗 漏海湾,并对所述遗漏海湾进行遍历。 可选的, 在所述无人水面艇从所述遗漏海湾的进入点进入所述遗漏海湾之前,还包括:记 录路径变更位置点以及在所述路径变更位置点处的原定行进方向,并从所述路径变更位置 点行驶至所述遗漏海湾的进入点; 在完成所述遗漏海湾的遍历后,回到所述路径变更位置点,并按所述路径变更位 置点处的原定行进方向行驶。 可选的,所述方法还包括: 在所述无人水面艇沿锯齿形路径中的区域边界行驶时: 实时判断当前位置是否为格栅与区域边界的交点; 如果判断结果表示所述当前位置为格栅与区域边界的交点,则记录所述交点,并 判断交点xi与交点xi-1是否位于同一栅格上且交点xi与交点xi-1之间的直线段位于所述多海 湾区域之外,其中,xi为在无人水面艇的运动时间维度上检测到的第i个交点; 如果是,则将交点xi标记为遗漏海湾进入点。 可选的,所述方法还包括: 当所述无人水面艇遍历完所述遗漏海湾后,从所述遗漏海湾的湾底直接行驶至所 述遗漏海湾的进入点,并从所述遗漏海湾的进入点退出所述遗漏海湾。 可选的,所述湾底的确定方法包括: 在所述无人水面艇沿区域边界运动过程中: 实时判断当前位置是否为栅格与区域边界的交点; 如果判断结果表示所述当前位置为栅格与区域边界的交点,则记录所述交点,并 判断所述交点是否为已经记录过的交点; 如果判断结果表示所述交点为已经记录过的交点,则确定所述无人水面艇已经到 达海湾的湾底。 可选的,所述无人水面艇从所述遗漏海湾的进入点进入所述遗漏海湾后,首先沿 锯齿形路径中的栅格行驶。 本发明还提供了一种基于无人水面艇的多海湾区域路径遍历系统,所述无人水面 艇在多海湾区域沿锯齿形路径运动,所述锯齿形路径为基于锯齿形路径规划方法建立的路 径,所述锯齿形路径由栅格以及区域边界构成,所述系统包括: 行进控制模块,用于控制所述无人水面艇沿所述锯齿形路径运动; 雷达模块,用于对所述无人水面艇周围的环境进行实时扫描: 6 CN 111580517 A 说 明 书 3/7 页 海湾探测模块,用于根据所述雷达的扫描信息确定所述无人水面艇周围是否存在 海湾; 判断模块,用于当所述无人水面艇周围存在海湾时,判断所述海湾是否位于所述 无人水面艇的行进侧,所述行进侧为与所述锯齿形路径整体趋向方向相同的一侧; 遗漏海湾进入点第一确定模块,用于当所述海湾不位于所述无人水面艇的行进侧 时,选取与所述海湾边界相交的栅格线中距离所述无人水面艇的当前位置最近的一条栅格 线作为第一栅格线,并将所述第一栅格线与所述海湾边界的交点之一记为遗漏海湾的进入 点,将所述海湾记为遗漏海湾; 重复海湾退出点确定模块,用于当所述海湾位于所述无人水面艇的行进侧时,选 取与所述海湾边界相交的栅格线中距离所述无人水面艇的当前位置最近的一条栅格线作 为第二栅格线,并将所述第二栅格线与所述海湾边界的交点之一记为重复海湾的退出点, 将所述海湾记为重复海湾; 重复海湾退出模块,用于当所述无人水面艇遍历完所述重复海湾后,从所述重复 海湾的湾底直接行驶至所述重复海湾的退出点,并从所述重复海湾的退出点退出所述重复 海湾; 遗漏海湾进入模块,用于当所述无人水面艇探测到所述遗漏海湾后,从所述遗漏 海湾的进入点进入所述遗漏海湾,并对所述遗漏海湾进行遍历。 可选的,所述系统还包括: 路径变更位置记录模块,用于在所述无人水面艇从所述遗漏海湾的进入点进入所 述遗漏海湾之前,记录路径变更位置点以及在所述路径变更位置点处的原定行进方向,其 中,所述路径变更位置点为改变原定路径开始向所述遗漏海湾进入点行驶时的位置; 位置返回模块,用于在完成所述遗漏海湾的遍历后,控制所述无人水面艇回到所 述路径变更位置点,并按所述路径变更位置点处的原定行进方向行驶。 可选的,所述系统还包括: 交点检测模块,用于在所述无人水面艇沿锯齿形路径中的区域边界行驶时,实时 判断当前位置是否为格栅与区域边界的交点; 交点记录模块,用于当所述当前位置为格栅与区域边界的交点时,记录所述交点; 遗漏海湾进入点第二确定模块,用于判断交点xi与交点xi-1是否位于同一栅格上 且交点xi与交点xi-1之间的直线段位于所述多海湾区域之外,其中,xi为在无人水面艇的运 动时间维度上检测到的第i个交点;并当交点xi与交点xi-1位于同一栅格上且交点xi与交点 xi-1之间的直线段位于所述多海湾区域之外时,将交点xi标记为遗漏海湾的进入点。 可选的,所述系统还包括:湾底确定模块,用于在所述无人水面艇沿区域边界运动 过程中,实时判断当前位置是否为已经记录过的交点,并在所述当前位置为已经记录过的 交点时,确定所述无人水面艇已经到达海湾的湾底。 根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的基于 无人水面艇的多海湾区域路径遍历方法及系统,在沿锯齿形路径运动的过程中,实时对遗 漏海湾以及重复海湾进行探测,并在确定某一海湾为重复海湾时,在遍历该海湾后,直接从 重复海湾的退出点退出该海湾,不再按锯齿形路径行驶,避免了路径的重复,在确定某一海 湾为遗漏海湾后,会从遗漏海湾的进入点进入该海湾进行遍历,避免了该海湾的遗漏。 7 CN 111580517 A 说 明 书 4/7 页 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获 得其他的附图。 图1为锯齿形路径规划示意图; 图2为重复海湾和遗漏海湾示意图; 图3为本发明实施例1提供的基于无人水面艇的多海湾区域路径遍历方法的流程 图; 图4为本发明实施例1中遗漏海湾进入点和重复海湾退出点的识别原理图; 图5为本发明实施例1的一实施方式中遗漏海湾进入方式图; 图6为本发明实施例1的一实施方式中遗漏海湾进入点的识别原理图; 图7为本发明实施例2提供的基于无人水面艇的多海湾区域路径遍历系统结构图。











