
技术摘要:
本发明涉及一种车道标记线检测方法、系统、以及存储介质,涉及电子地图技术领域,解决了手绘的车道线由于人为的主观性常常不精确,以至于影响后续智能移动终端的精确行驶的问题,其包括:步骤S100:主控终端启动拍摄装置并通过拍摄装置获取智能移动终端前方RGB图像;步 全部
背景技术:
随着计算机技术的广泛应用和发展创新,越来越多的智能产品出现在人们 的生 活中,智能移动终端成为人们受欢迎的智能产品之一。 现有智能移动终端在工作的时候主要是按照既定的车道线来行驶的,而既定的车 道线往往是工作人员手绘车道线标记到地图中。 上述中的现有技术方案存在以下缺陷:手绘的车道线由于人为的主观性常常不精 确,以至于影响后续智能移动终端的精确行驶。
技术实现要素:
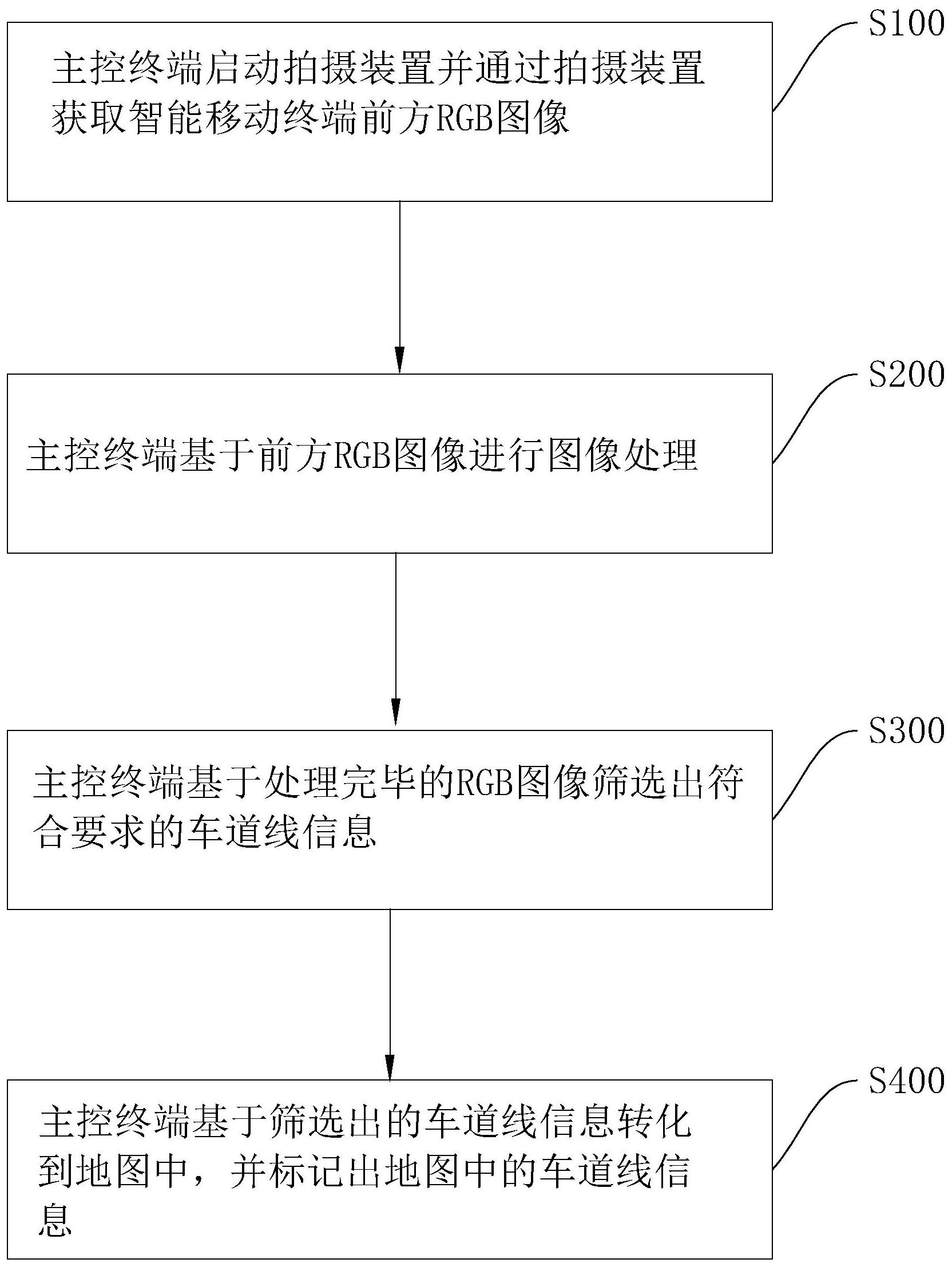
本发明的目的是提供一种具有有效实现了对现场车道线的检测且融入到地图中 从而方便智能移动终端更为精确的行驶的效果的车道标记线检测方法。 本发明的上述发明目的是通过以下技术方案得以实现的: 一种车道标记线检测方法,包括以下步骤: 步骤S100:主控终端启动拍摄装置并通过拍摄装置获取智能移动终端前方RGB图像; 步骤S200:主控终端基于前方RGB图像进行图像处理; 步骤S300:主控终端基于处理完毕的RGB图像筛选出符合要求的车道线信息; 步骤S400:主控终端基于筛选出的车道线信息转化到地图中,并标记出地图中的车道 线信息。 通过采用上述技术方案,通过步骤S100、步骤S200的设置实现了对智能移动终端 前方路段的图像采集获取以及相应处理,而步骤S300、步骤S400的设置则实现了基于处理 完图片的车道线信息提取,并将车道线信息在地图中标记出来,从而便利于智能移动终端 在前行工作的时候能够按照车道线来,避免出现行驶错误的现象出现。 本发明进一步设置为:步骤S200包括以下步骤: 步骤S210:主控终端截取前方RGB图像的下半部分且保留下半部分图像; 步骤S220:主控终端启动双边滤波模块去除图像的噪点信息。 通过采用上述技术方案,通过步骤S210的设置考虑到车道线主要位于图像下半部 分,因此在截取的时候也只截取下半部分并对下半部分进行保留,一方面减少了数据的存 储,另一方面也提高了对图片的处理效率,而步骤S220的设置有效实现了对图像的去噪点, 从而减少了图片中的不良因素。 本发明进一步设置为:步骤S300包括以下步骤: 步骤S310:主控终端以车道线作为查询对象,于第一数据库中查询出相应车道线所对 应的颜色阈值和约束条件,第一数据库为预设数据库,存储有车道线以及车道线所匹配的 3 CN 111597995 A 说 明 书 2/5 页 颜色阈值和约束条件; 步骤S320:主控终端调取图像,并通过调取于第一数据库的颜色阈值和约束条件提取 出符合要求的车道线信息。 通过采用上述技术方案,通过步骤S310、步骤S320的设置基于车道线颜色阈值和 约束条件有效实现了对车道线的识别判断并进行相应提取,从而进一步减少图片中的干扰 因素。 本发明进一步设置为:步骤S300还包括位于步骤S320之后的步骤S330,步骤S330 具体如下: 主控终端启动形态学变化模块,通过形态学变化模块的腐蚀膨胀功能进一步滤除细长 的车道线噪点。 通过采用上述技术方案,通过形态学变化模块可以进一步减少图片中的车道线噪 点,进一步减少干扰因素。 本发明进一步设置为:步骤S300还包括位于步骤S330之后的步骤S340,步骤S340 包括以下步骤: 步骤S341:主控终端基于车道线信息标记出最小的外接轮廓线条; 步骤S342:主控终端调取第二数据库获取车道线特征信息,第二数据库为预设数据库, 存储有车道线特征信息,定义车道线特征信息包括最小外接轮廓像素面积阈值以及相应最 小外接轮廓像素面积阈值下的外接轮廓长度和外接轮廓宽度之间的关系; 步骤S343:主控终端基于车道线特征信息滤除非车道线信息。 通过采用上述技术方案,通过步骤S341、步骤S342、步骤S343的设置通过标记出最 小的外接轮廓线条,从而减少图片中的无效车道线信息,从而减少信息的干扰,为后续车道 线信息融入地图做好准备。 本发明进一步设置为:步骤S400包括以下步骤: 步骤S410:主控终端启动相机内外参转换模块基于获取的图像信息,获取最小外接轮 廓底部像素点的实际距离信息; 步骤S420:主控终端把获得的距离信息转化到实际的地图中,并在地图中以点的形式 显示出识别到的车道线信息; 步骤S430:主控终端通过首尾点相连或者直线拟合的方法标记出车道线信息。 通过采用上述技术方案,通过步骤S410、步骤S420、步骤S430的设置基于车道线信 息通过相机内外参转换模块进行内外参数转换,从而将车道线信息精确的融入到地图中, 从而方便智能移动终端在行驶的时候能够更好的按照车道线来行驶。 本发明的目的二是提供一种具有有效实现了对现场车道线的检测且融入到地图 中从而方便智能移动终端更为精确的行驶的效果的车道标记线检测系统, 本发明的上述发明目的是通过以下技术方案得以实现的: 一种车道标记线检测系统,包括存储器、处理器及存储在所述存储器上并可在所述处 理器上运行的程序,该程序能够被处理器加载执行时实现如上述权利要求中所述的车道标 记线检测方法。 通过采用上述技术方案,实现了对智能移动终端前方路段的图像采集获取以及相 应处理,且实现了基于处理完图片的车道线信息提取,并将车道线信息在地图中标记出来, 4 CN 111597995 A 说 明 书 3/5 页 从而便利于智能移动终端在前行工作的时候能够按照车道线来,避免出现行驶错误的现象 出现 本发明的目的三是提供计算机存储介质,方便处理器调取车道标记线检测方法的程 序,实现了对现场车道线的检测且融入到地图中从而方便智能移动终端更为精确的行驶。 本发明的上述发明目的是通过以下技术方案得以实现的: 一种计算机存储介质,包括能够被处理器加载执行时实现如上述权利要求所述的车道 标记线检测方法的程序。 通过采用上述技术方案,方便了处理器对车道标记线检测方法的程度的调取,实 现了对现场车道线的检测且融入到地图中从而方便智能移动终端更为精确的行驶。 综上所述,本发明的有益技术效果为:通过智能移动终端前方路段拍摄获取的照 片信息采集分析出车道线信息,并将车道线信息融入到地图中,有效方便了智能移动终端 对车道线信息的精确识别,方便智能移动终端精准行驶。 附图说明 图1是本发明一种车道标记线检测方法的整体步骤示意图。 图2是图1中步骤S200的具体步骤示意图。 图3是图1中步骤S300的具体步骤示意图。 图4是步骤S340的具体步骤示意图。 图5是图1中步骤S400的具体步骤示意图。











