
技术摘要:
本申请实施例公开了一种便捷式警示牌控制方法以及相关装置,用于解决由人员在交通道路上徒步去放置三角警示牌存在着很高的道路安全风险隐患的问题。本申请实施例方法包括:获取故障车辆的定位位置;根据定位位置确定事故发生地;获取事故发生地所处车道的车道信息,车 全部
背景技术:
随着社会的发展,道路上的车辆越来越多,在道路上的交通事故发送频率也越来 越多,现有技术中,在车辆发生故障或者发生事故时,根据《中华人民共和国道路交通安全 法》相关规定需要放置三角警示牌在事故车后的规定距离,以便提醒后方来车注意避让,减 少二次事故的发生。然而,从事故发生时到将三角警示牌放置在事故车后规定距离时的这 段时间,由人员在交通道路上徒步去放置三角警示牌存在着很高的道路安全风险,存在道 路安全隐患。
技术实现要素:
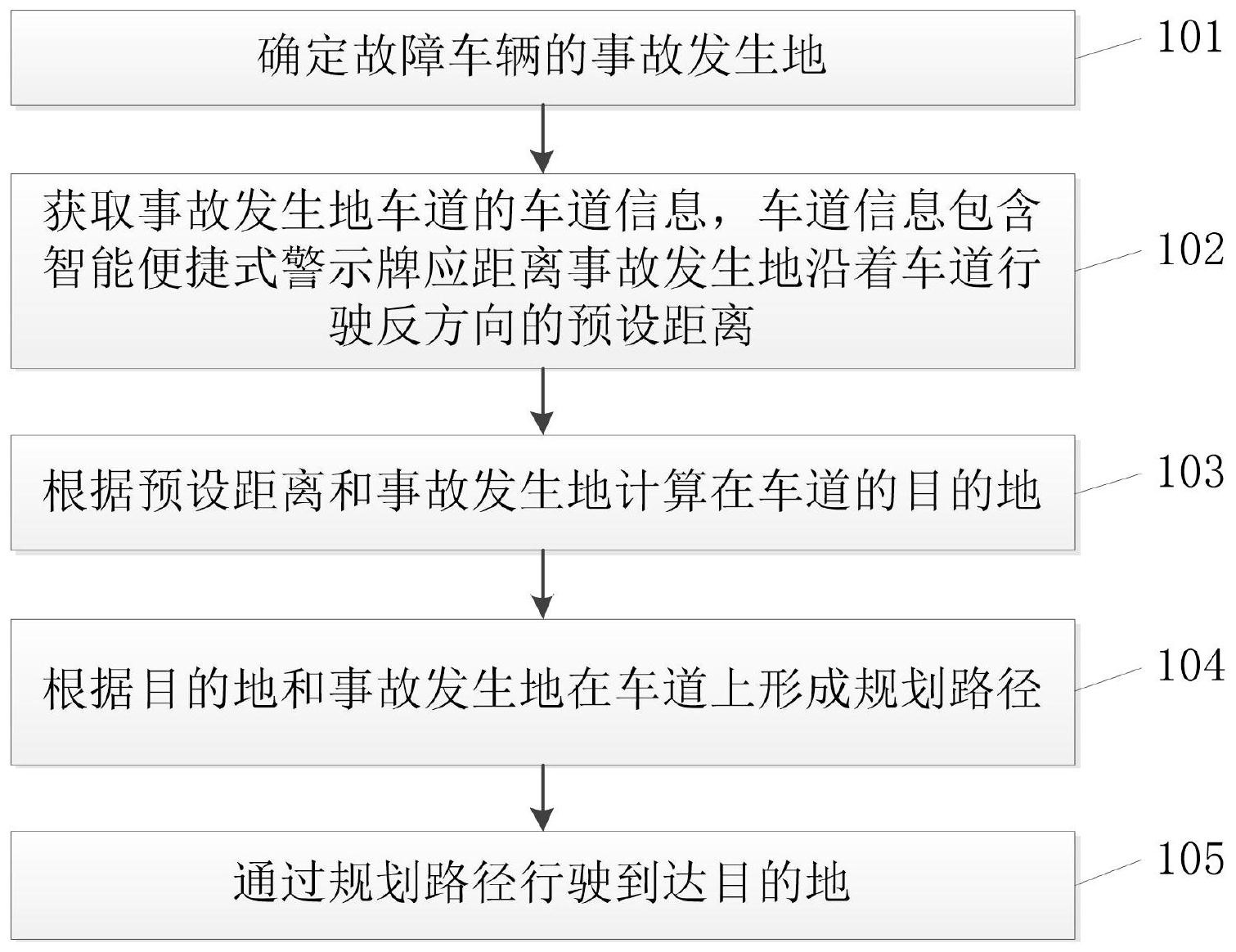
本申请实施例提供了一种便捷式警示牌控制方法以及相关装置,用于解决由人员 在交通道路上徒步去放置三角警示牌存在着很高的道路安全风险隐患的问题。 本申请第一方面提供一种便捷式警示牌控制方法,应用于智能便捷式警示牌,包 括: 确定故障车辆的事故发生地; 获取所述事故发生地所处车道的车道信息,所述车道信息包含所述智能便捷式警 示牌应距离所述事故发生地沿着所述车道行驶反方向的预设距离; 根据所述预设距离和所述事故发生地计算在所述车道的目的地; 根据所述目的地和所述事故发生地在所述车道上形成规划路径; 通过所述规划路径行驶到达所述目的地。 可选地,在确定故障车辆的事故发生地之前,所述方法还包括: 接收所述故障车辆的车辆报警信息; 所述根据所述定位位置确定事故发生地之后,所述方法还包括: 将所述车辆报警信息和所述事故发生地生成事故信息; 向外广播所述事故信息。 可选地,所述确定故障车辆的事故发生地之前包括: 获取所述故障车辆发送的车辆位置; 将所述车辆位置确定为所述故障车辆的所述事故发生地; 或, 向卫星定位系统发送定位请求; 接收所述卫星定位系统根据所述定位请求返回的当前位置; 将所述当前位置确定为所述故障车辆的所述事故发生地; 或, 5 CN 111591212 A 说 明 书 2/14 页 获取所述故障车辆发送的车辆位置; 向卫星定位系统发送定位请求; 接收所述卫星定位系统根据所述定位请求返回的当前位置; 若所述车辆位置与所述当前位置的距离在预设距离范围内,则将所述车辆位置确 定为所述故障车辆的所述事故发生地; 若所述车辆位置与所述当前位置的距离不在预设距离范围内,则以所述当前位置 确定为所述故障车辆的所述事故发生地。 可选地,在根据所述目的地和所述事故发生地在所述车道上形成规划路径之后, 通过所述规划路径行驶到达所述目的地之前,所述方法还包括: 实时监测所述智能便捷式警示牌的周围环境,得到周围环境信息; 根据所述周围环境信息调整所述规划路径,形成前进路径; 通过所述规划路径行驶到达所述目的地包括: 通过所述前进路径行驶到达所述目的地。 可选地,在通过所述前进路径行驶到达所述目的地之前,所述方法还包括; 启动所述智能便捷式警示牌的稳定保存装置,以使得所述智能便捷式警示牌保持 预设的稳定姿态。 可选地,在通过所述前进路径行驶到达所述目的地之后,所述方法还包括: 启动所述智能便捷式警示牌的位置驻停装置; 关闭所述稳定保持装置。 可选地,在通过所述前进路径行驶到达所述目的地之后,在启动所述智能便捷式 警示牌的位置驻停装置之前,所述方法还包括: 检测所述智能便捷式警示牌是否在所述车道的正中央; 若所述智能便捷式警示牌在所述车道的正中央,则触发所述启动所述智能便捷式 警示牌的位置驻停装置的步骤; 若所述智能便捷式警示牌不在所述车道的正中央,则行驶到达所述车道的正中 央,触发所述启动所述智能便捷式警示牌的位置驻停装置的步骤;或, 检测所述智能便捷式警示牌是否在所述事故发生地的沿着所述车道行驶方向的 正后方; 若所述智能便捷式警示牌在所述事故发生地的沿着所述车道行驶方向的正后方, 则触发所述启动所述智能便捷式警示牌的位置驻停装置的步骤; 若所述智能便捷式警示牌不在所述事故发生地的沿着所述车道行驶方向的正后 方,则行驶到达所述事故发生地的沿着所述车道行驶方向的正后方,触发所述启动所述智 能便捷式警示牌的位置驻停装置的步骤。 可选地,在通过所述前进路径到达所述目的地之后,所述方法还包括: 接收召回指令; 启动所述稳定保持装置; 收起所述位置驻停装置; 根据所述召回指令返回所述事故发生地; 当所述便捷式警示牌到达所述事故发生地之后,启动所述位置驻停装置。 6 CN 111591212 A 说 明 书 3/14 页 可选地,在实时检测所述智能便捷式警示牌的周围环境,得到周围环境信息之后, 所述方法还包括: 根据所述周围环境信息判断是否需要开启所述智能便捷式警示牌的闪光灯; 若所述周围环境信息满足预设条件,则开启所述闪光灯。 可选地,所述根据所述预设距离和所述事故发生地计算在所述车道的目的地包 括: 以所述事故发生地为起点,沿着所述车道行驶反方向计算预设距离取终点,所述 终点为所述目的地; 或, 以所述事故发生地为起点,以所述预设距离为半径做圆,所述圆的边与所述车道 行驶反方向的车道中线的交点为所述目的地。 本申请第二方面提供一种便捷式警示牌控制系统,应用于智能便捷式警示牌,包 括: 确定单元,用于确定故障车辆的事故发生地; 获取单元,用于获取所述事故发生地所处车道的车道信息,所述车道信息包含所 述智能便捷式警示牌应距离所述事故发生地沿着所述车道行驶反方向的预设距离; 计算单元,用于根据所述预设距离和所述事故发生地计算在所述车道的目的地; 形成单元,用于根据所述目的地和所述事故发生地在所述车道上形成规划路径; 行驶单元,用于通过所述规划路径行驶到达所述目的地。 可选地,所述系统还包括: 接收单元,用于接收所述故障车辆的车辆报警信息; 生成单元,用于将所述车辆报警信息和所述事故发生地生成事故信息; 广播单元,用于向外广播所述事故信息。 可选地,所述确定单元在确定故障车辆的事故发生地时,具体包括: 获取所述故障车辆发送的车辆位置; 将所述车辆位置确定为所述故障车辆的所述事故发生地;或, 向卫星定位系统发送定位请求; 接收所述卫星定位系统根据所述定位请求返回的当前位置; 将所述当前位置确定为所述故障车辆的所述事故发生地;或, 获取所述故障车辆发送的车辆位置; 向卫星定位系统发送定位请求; 接收所述卫星定位系统根据所述定位请求返回的当前位置; 若所述车辆位置与所述当前位置的距离在预设距离范围内,则将所述车辆位置确 定为所述故障车辆的所述事故发生地; 若所述车辆位置与所述当前位置的距离不在预设距离范围内,则以所述当前位置 确定为所述故障车辆的所述事故发生地。 可选地,所述系统还包括: 监测单元,用于实时监测所述智能便捷式警示牌的周围环境,得到周围环境信息; 调整单元,用于根据所述周围环境信息调整所述规划路径,形成前进路径; 7 CN 111591212 A 说 明 书 4/14 页 行驶单元,还用于通过所述前进路径到达所述目的地。 可选地,所述系统还包括; 启动单元,用于启动所述智能便捷式警示牌的稳定保存装置,以使得所述智能便 捷式警示牌保持预设的稳定姿态。 可选地,所述系统还包括: 启动单元,还用于启动所述智能便捷式警示牌的位置驻停装置; 关闭单元,用于关闭所述稳定保持装置。 可选地,所述系统还包括: 检测单元,用于检测所述智能便捷式警示牌是否在所述车道的正中央; 触发单元,用于若所述智能便捷式警示牌在所述车道的正中央,则触发所述启动 单元启动所述智能便捷式警示牌的位置驻停装置的步骤; 行驶单元,还用于若所述智能便捷式警示牌不在所述车道的正中央,则行驶到达 所述车道的正中央; 触发单元,还用于当行驶到达所述车道的正中央时,触发所述启动单元启动所述 智能便捷式警示牌的位置驻停装置的步骤;或, 检测单元,还用于检测所述智能便捷式警示牌是否在所述事故发生地的沿着所述 车道行驶方向的正后方; 触发单元,还用于若所述智能便捷式警示牌在所述事故发生地的沿着所述车道行 驶方向的正后方,则触发所述启动所述智能便捷式警示牌的位置驻停装置的步骤; 行驶单元,还用于若所述智能便捷式警示牌不在所述事故发生地的沿着所述车道 行驶方向的正后方,则行驶到达所述事故发生地的沿着所述车道行驶方向的正后方; 触发单元,还用于当行驶到达所述事故发生地的沿着所述车道行驶方向的正后方 时,触发所述启动所述智能便捷式警示牌的位置驻停装置的步骤。 可选地,所述系统还包括: 接收单元,还用于接收召回指令; 启动单元,还用于启动所述稳定保持装置; 关闭单元,用于收起所述位置驻停装置; 行驶单元,还用于根据所述召回指令返回所述事故发生地; 启动单元,还用于当所述便捷式警示牌到达所述事故发生地之后,启动所述位置 驻停装置。 可选地,所述系统还包括: 判断单元,用于根据所述周围环境信息判断是否需要开启所述智能便捷式警示牌 的闪光灯; 开启单元,还用于若所述周围环境信息满足预设条件,则开启所述闪光灯。 可选地,所述计算单元在根据所述预设距离和所述事故发生地计算在所述车道的 目的地时,具体用于: 以所述事故发生地为起点,沿着所述车道行驶反方向计算预设距离取终点,所述 终点为所述目的地;或, 以所述事故发生地为起点,以所述预设距离为半径做圆,所述圆的边与所述车道 8 CN 111591212 A 说 明 书 5/14 页 行驶反方向的车道中线的交点为所述目的地。 本申请第三方面还提供一种智能便捷式警示牌,包括: 处理器、存储器、总线、无线通信装置、传感器、行驶单元、稳定保持装置、驻停装 置; 所述处理器通过总线与所述存储器、输入输出设备、无线通信装置、传感器、行驶 单元、稳定保持装置、驻停装置相连; 所述处理器执行如前述第一方面中任一项所述的方法。 本申请第四发面提供一种计算机存储介质,所述计算机存储介质中存储有指令, 所述指令在计算机上执行时,使得所述计算机执行如前述第一方面中任一项所述的方法。 本申请第五方面提供了一种计算机程序产品,其特征在于,所述计算机程序产品 在计算机上执行时,使得所述计算机执行如前述第一方面中任一项所述的方法。 从以上技术方案可以看出,本申请实施例具有以下优点: 本申请中的智能便捷式警示牌可以为《中华人民共和国道路交通安全法》中规定 形状的三角警示牌形状,可以在获取故障车辆的定位位置前提下,可以粗略地将该定位位 置视为事故发生地,然后通过V2X通讯技术从互联网中获事故发生地所处车道的车道信息, 以得到该车道被规定的需要放置便捷式警示牌在事故车后的预设距离等信息,接着就可以 根据该预设距离和该事故发生地计算得到智能便捷式警示牌需要放置的目的地,然后将目 的地和事故发生地沿着车道连接形成规划路径,智能便捷式警示牌沿着该规划路径行驶即 可到达所述目的地。可见,通过本申请的便捷式警示牌控制方法可以控制智能便捷式警示 牌自动到达符合当地法律法规规定需要放置便捷式警示牌在事故车辆后的规定距离,解决 由人员徒步去放置三角警示牌存在着很高的道路安全风险隐患的问题。 附图说明 图1为本申请便捷式警示牌控制方法的一个流程示意图; 图2为本申请便捷式警示牌控制方法的另一个流程示意图; 图3为本申请便捷式警示牌控制系统的一个结构示意图; 图4为本申请便捷式警示牌控制系统的另一个结构示意图; 图5为本申请智能便捷式警示牌的一个结构示意图。











