
技术摘要:
本发明提供了一种对ECO特征提取性能进行优化的目标跟踪方法及装置,该方法包括以下步骤:读取视频或图像序列的第一帧图像,确定跟踪目标;将初始帧中跟踪目标所在候选区域缩放到特定大小,利用并行方式计算傅里叶变换来提取特征;针对特征制作label标签,修改高斯分布 全部
背景技术:
视觉目标跟踪是计算机视觉中一个重要研究方向,在军事无人飞行器、精确制导 以及空中预警和民用视频监控,人机交互和无人驾驶等众多领域有着极其广泛的应用,然 而目标跟踪面临着目标尺度变换、重度遮挡、快速移动、超出视野和光照变化等众多挑战, 因此提出一种可靠的实时视觉目标跟踪方法具有很重要的现实意义。 以往的相关滤波视觉目标跟踪算法主要是使用给出的样本去训练一个判别分类 器,判断跟踪到的是目标还是周围的背景信息。主要使用轮转矩阵对样本进行采集,使用快 速傅里叶变换对算法进行加速计算,而ECO目标跟踪算法在此基础上着重于解决模型过大 的问题,通过减少参数,简化训练集,减少模型更新频率来加快跟踪速度,对抗模型漂移。对 于目标轻度遮挡、姿态改变以及光照变化具有很好的跟踪效果,然而算法速度仍然有所限 制,无法在嵌入式平台上达到实时跟踪的目的。
技术实现要素:
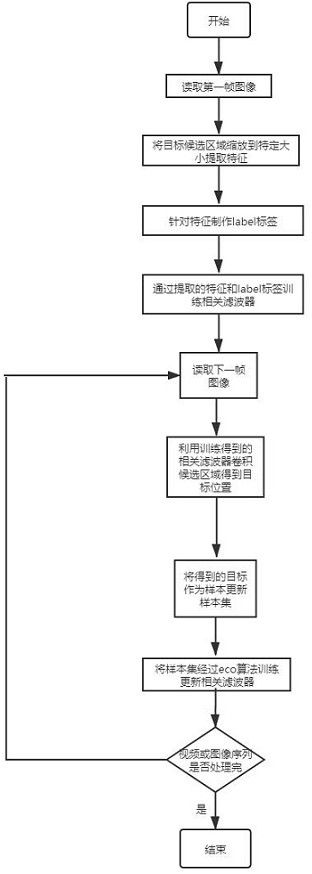
为解决现有技术存在的上述问题,本发明提供一种对ECO特征提取性能进行优化 的目标跟踪方法及装置。 本发明是这样实现的: 一方面,本发明提供一种对ECO特征提取性能进行优化的目标跟踪方法,包括以下步 骤: S1、读取视频或图像序列的第一帧图像,确定跟踪目标; S2、将初始帧中跟踪目标所在候选区域缩放到特定大小,利用并行方式计算傅里叶变 换来提取特征; S3、针对特征制作label标签,修改高斯分布为多个极值; S4、通过提取的特征和label标签训练ECO的相关滤波器; S5、读取下一帧图像,利用训练好的相关滤波器卷积图像候选区域对应的特征,获取图 像候选区域的置信度图,置信度图概率最大位置对应当前帧图像的目标位置及其置信度概 率; S6、将得到的目标作为样本,使用样本融合更新策略,更新ECO算法的样本集; S7、利用更新的样本集采用步骤S2的方法提取特征,同时制作label标签训练ECO,更新 相关滤波器; S8、循环执行步骤S5~S7,直至当前视频或图像序列处理完。 进一步地,所述步骤S2具体包括: 先对跟踪目标所在候选区域z提取多尺度特征x,包括FHOG特征以及颜色CN特征,将提 6 CN 111598926 A 说 明 书 2/10 页 取的特征进行PCA降维,然后通过傅里叶变换由时域转为频域,傅里叶转化公式如下: 其中 为降维后的离散特征,N、M对应二维离散特征的行数和列数。 进一步地,所述步骤S2中对跟踪目标所在候选区域提取FHOG特征具体包括: (1)将输入的RGB三通道图像转化为单通道图像; (2)采用gamma校正法对输入图像进行颜色空间的标准化,校正公式为: 其中0











