
技术摘要:
本发明涉及一种适应推力可调模式的飞行器精确软着陆闭环制导方法,根据当前弹目矢量计算指令速度矢量角速率,然后计算换坐标系的指令倾角速率,由换坐标系的指令倾角速率计算纵侧向过载;同时由当前高度速度计算牛顿迭代解标推力与剩余时间,之后结合气动数据计算气动 全部
背景技术:
火箭助推级垂直定点回收并重复使用是一种降低发射成本有效的途径。由于火箭 动力着陆段飞行时间短,要求落点精度高,因此火箭垂直定点着陆过程对制导控制方法提 出了很高的要求。由于火箭垂直返回定点着陆的制导任务十分复杂,寻找能够满足过程约 束以及终端约束并且在收敛特性上具有快速型以及鲁棒性的制导算法,一直是众多学者探 索并且研究的方向。近年来,一些火箭垂直回收与定点着陆制导算法相继被提出,在多约束 制导算法方面取得了很大的进步,然而依然存在有一些问题亟待解决: 目前只有美国SpaceX公司通过猎鹰-9火箭对其一级助推器真正实现了进行的多 次垂直回收,其末制导阶段采用了一种基于凸优化的轨迹规划算法实现在线闭环制导。既 根据火箭动力学模型将直接法轨迹优化(非凸)问题转化为由凸函数描述的凸优化问题,从 而使原始的非线性规划问题的求解,具有一般数值优化算法所具有的收敛域大的优点,并 且还具有更快的收敛速度。在实际计算过程中,凸优化算法具有多项式时间复杂度,从而保 证在给定精度条件下具有求解时间可控的收敛效率,能够在预先确定的迭代次数上限内收 敛且迭代次数几乎与问题的维数无关。另外,求解凸优化问题时采用的原始-对偶内点法, 对于一些特定的凸优化问题该求解器不依赖于任何初始猜想条件并且能够可靠求解。
技术实现要素:
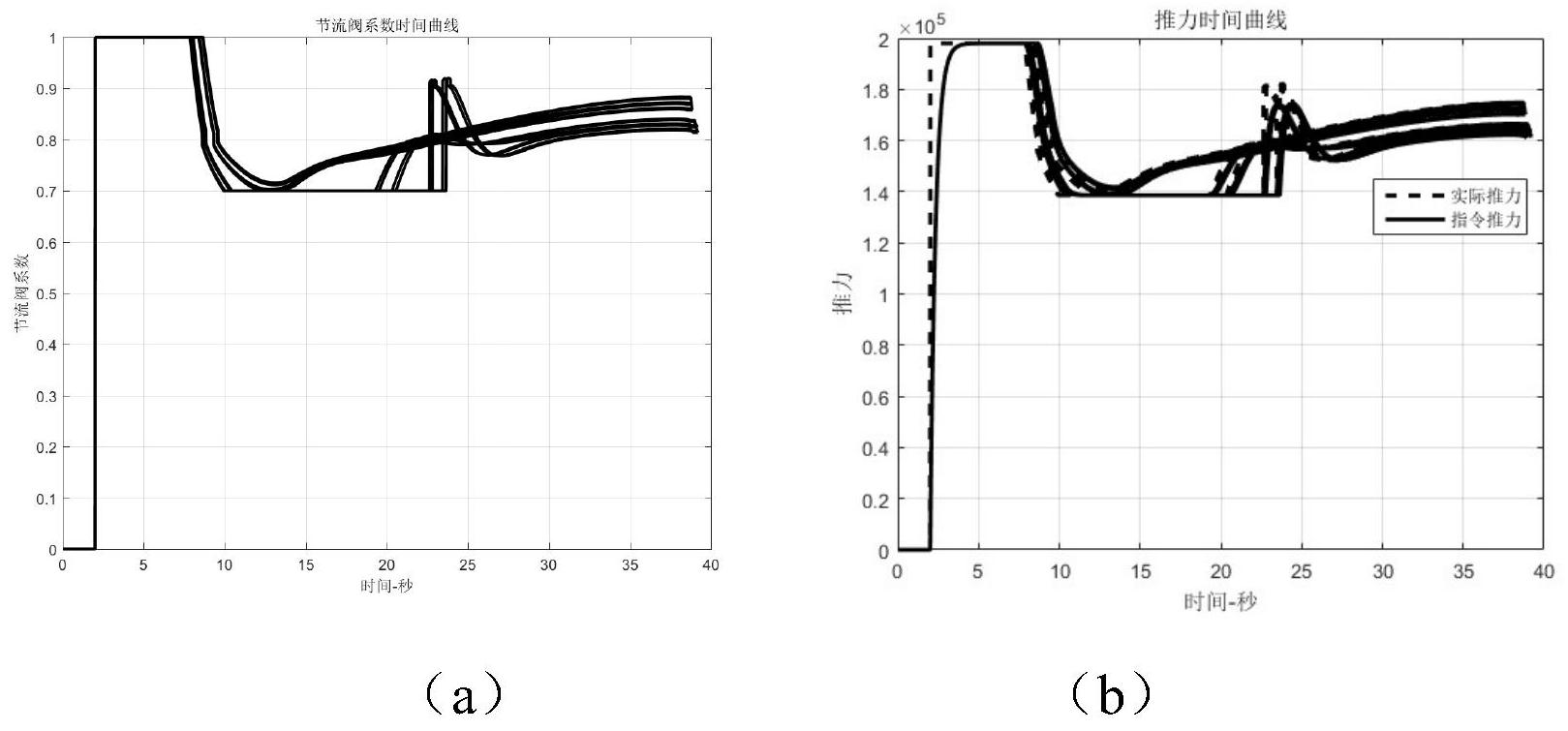
要解决的技术问题 本发明主要解决目前采用凸优化技术存在的不足,既当回收火箭的动力学特性具 有高度非线性且强干扰时,考虑过程约束是凸化难度大。此外该方法求解采用数值内点法 进行求解,计算量大,当不确定干扰时会导致收敛时间变慢,甚至无法进行快速求解。 为了克服以上凸优化方法确定运载火箭垂直回收段制导律所存在的实时性、收敛 性及求解方式复杂等问题,本发明结合实际运载火箭可调推力的特性,从最优控制的角度 提出了一种实时的闭环解析制导方案。 技术方案 一种适应推力可调模式的飞行器精确软着陆闭环制导方法,其特征在于步骤如 下: 步骤1:计算视线坐标内的三个速度分量VSx,VSy,VSz:根据探测系统测量得到在地 面雷达坐标系内箭体的三个速度分量VTx,VTy,VTz以及三个位置分量xT,yT,zT,并通过等式计 算: 4 CN 111591470 A 说 明 书 2/8 页 式中弹目连线的高低角 和方位角 步骤2:根据地面雷达坐标系内箭体的三个速度分量VTx,VTy,VTz计算弹道坐标系内 的速度倾角θ以及抗奇异倾角θ′: 步骤3:根据地面雷达坐标系内箭体的三个速度分量VTx,VTy,VTz计算弹道坐标系内 的速度偏角σ以及抗奇异偏角σ': 步骤4:根据地面雷达坐标系内箭体的三个速度分量VTx,VTy,VTz及高低角λD计算视 线坐标系内高低角速率 和方位角速率 式中 步骤5:计算剩余时间的近似值tgo=Rmt/(-VSx): 步骤6:根据高低角λD和方位角λT、高低角速率 和方位角速率 剩余时间tgo计 算视线角速率 和 式中垂直着陆终端视线角约束为γDF=0°;γTF=90°; 步骤7:根据视线角速率 和 方位角λT计算弹道倾角速率 和弹道偏角速率 步骤8:根据速度倾角θ以及抗奇异倾角θ′、速度偏角σ以及抗奇异偏角σ'计算速度 滚转角γx: 步骤9:计算弹道坐标系的纵向过载指令Nyc和侧向过载指令Nzc:根据惯性导航器 件测量得到飞行器当前速度大小V以及步骤2和步骤3计算得到的θ,θ'和σ,σ',通过等式计 5 CN 111591470 A 说 明 书 3/8 页 算: 式中 g为重力加速度; 步骤10:计算飞行器的理论推力Fthe与剩余着陆时间s:根据惯性导航器件测量得 到飞行器当前高度h以及飞行速度V,并求解下式二维非线性方程组得到理论推力与着陆时 间: 式中 为飞行器的额定秒流量; 步骤11:计算节流阀调节系数κ:根据飞行器动力系统的比冲Vex和额定秒流量 以及步骤10的理论推力值Fthe,并通过等式计算: 步骤12:输出步骤9计算的纵向过载指令Nyc和侧向过载指令Nzc,输出步骤10的理 论推力Fthe,并按照步骤11计算的κ调节发动机节流阀。 有益效果 本发明制导方案从总体步骤来看只需要根据弹目连线计算纵侧向过载;再根据实 时高度、速度计算所需推力,计算过程是简单并且易于理解的。从对制导方案的实施条件来 看,其具有闭环解析的形式,这使得改进过程得以层层推进并具有相应物理意义,且不存在 凸优化当中所存在的制导律收敛性问题。其次,由于推力指令的作用方向始终位于速度的 反方向上,这使得基于当前攻角、侧滑角,能够进行火箭姿态的实时解算,换句话说就是不 存在制导控制一体化的问题。另外,其计算量在制导周期以内较优化方式设计的制导律要 小得多,具有实时性好的优点。最后,通过对可用中间推力的轨迹跟踪,能够使得制导方案 能够满足推力边界要求,同时具有较强的鲁棒性。 附图说明 图1控落角导引律示意图 图2控落角导引律分平面示意图 图3制导计算流程示意图 图4组合偏差状态仿真动力曲线簇 图5组合偏差状态仿真气动角曲线簇 图6组合偏差状态仿真纵向角度曲线簇 图7组合偏差状态仿真速度高度曲线簇 图8组合偏差状态仿真动压与纵向过载曲线簇 6 CN 111591470 A 说 明 书 4/8 页











