
技术摘要:
本发明公开了一种防疫消毒清洁机器人消毒清洁作业效果检测方法及装置,所述方法包括步骤:分别获取并保存机器人沿预设的规划行驶路径进行清扫前、后的地面未清洁图像和已清洁图像;对所述未清洁图像和已清洁图像进行比对;当对比不合格时,控制机器人先沿预设的规划行 全部
背景技术:
通过洗地机对地面进行清洁吸地作业时,由于作业参数是事先统一设定的,在面 对一些较难清洁干净的地面时可能会出现一次清洁难以达标的区域,这时,需要对该区域 进行判定和二次清洁。市场上现有的自动化智能洗地机在判定洗地效果以后需要对二次清 洗的地点进行路径规划,其使用现有路径规划方法进行路径规划,即对一个区域中的所有 地面图像与清洗标准图像进行比对以后再重新进行路径规划,如果不合格的地面图像相距 很远,则统计完所有不合格区域后再重新规划清洗将导致作业效率低下、时机浪费和能源 浪费等诸多问题。
技术实现要素:
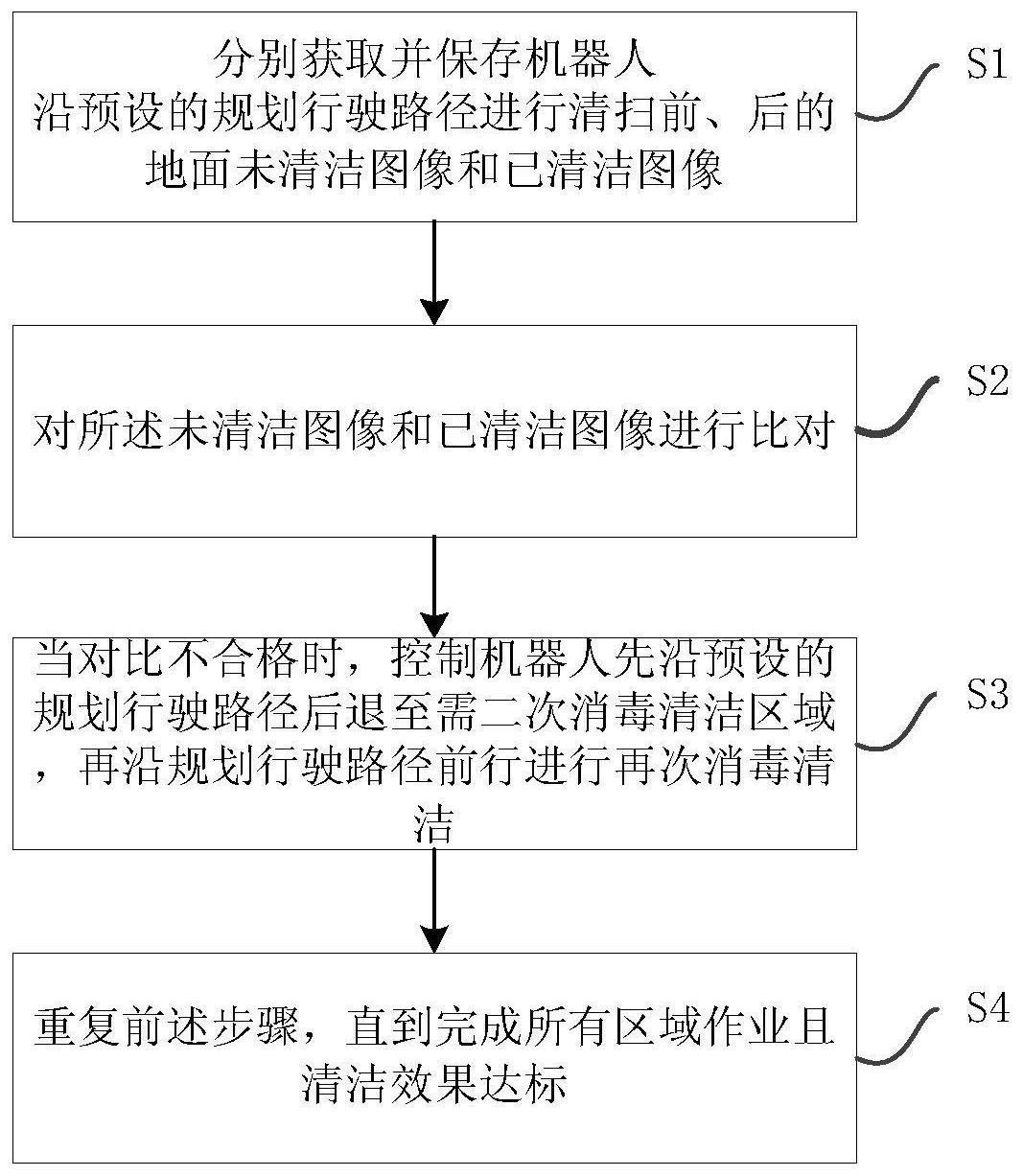
本发明一方面提供了一种防疫消毒清洁机器人消毒清洁作业效果检测方法,以解 决现有洗地机因洗地效果不佳进行二次清洁时效率低下、时机浪费和能源浪费的技术问 题。 本发明采用的技术方案如下: 一种防疫消毒清洁机器人消毒清洁作业效果检测方法,包括步骤: 分别获取并保存机器人沿预设的规划行驶路径进行清扫前、后的地面未清洁图像 和已清洁图像; 对所述未清洁图像和已清洁图像进行比对; 当对比不合格时,控制机器人先沿预设的规划行驶路径后退至需二次消毒清洁区 域,再沿规划行驶路径前行进行再次消毒清洁; 重复前述步骤,直到完成所有区域作业且清洁效果达标。 进一步地,所述地面未清洁图像和已清洁图像为RGB图像且通过深度相机分别获 取。 进一步地,对所述未清洁图像和已清洁图像进行比对之前还包括步骤: 对所述未清洁图像和已清洁图像进行预处理得到清扫前、后的地面污渍相关特征 参数,所述地面污渍相关特征参数包括亮度参数,污渍面积和数量。 进一步地,所述亮度参数通过如下步骤获得: 将所述未清洁图像和已清洁图像分别转成灰度图像; 对所述灰度图进行每个像素点计算偏离128的差,然后对整个图像求和取均值,将 结果记作P,得到所述未清洁图像和已清洁图像的亮度参数。 进一步地,所述污渍面积和数量通过如下步骤获得: 基于FCN语义分割网络,构造级联自编码结构对所述未清洁图像和已清洁图像中 4 CN 111568321 A 说 明 书 2/7 页 的污渍进行定位分割; 将分割后的污渍用卷积神经网络CNN进行污渍分类,通过最小凸包面积计算污渍 的面积; 将分割后的污渍进行标记和统计得到污渍数量。 进一步地,对所述未清洁图像和已清洁图像进行比对具体包括步骤: 比较所述未清洁图像和已清洁图像的亮度参数、污渍面积和数量; 当已清洁图像的污渍数量和面积大于未清洁图像的污渍数量和面积, 和/或已清洁图像的亮度参数小于未清洁图像的亮度参数时,判定清洁效果不合 格。 进一步地,当对比不合格时,控制机器人先沿预设的规划行驶路径减速后退至需 二次消毒清洁区域,再沿规划行驶路径加大机器人洗地功率和/或慢速前行对所述需二次 消毒清洁区域进行再次消毒清洁。 本发明另一方面提供了一种防疫消毒清洁机器人消毒清洁作业效果检测装置,包 括: 图像获取模块,用于通过深度相机分别获取并保存机器人沿预设的规划行驶路径 行进时清扫前、后的地面未清洁图像和已清洁图像; 图像比对模块,用于对所述未清洁图像和已清洁图像进行比对; 控制模块,用于当对比不合格时,控制机器人先沿预设的规划行驶路径后退至需 二次消毒清洁区域,再沿规划行驶路径前行进行再次消毒清洁。 本发明另一方面提供了一种存储介质,所述存储介质包括存储的程序,在所述程 序运行时控制所述存储介质所在的设备执行如所述的防疫消毒清洁机器人消毒清洁作业 效果检测方法。 本发明另一方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并 可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如所述的防疫消毒清洁 机器人消毒清洁作业效果检测方法。 本发明包括如下有益效果: 本发明通过对清扫前、后的地面未清洁图像和已清洁图像进行比对来判断洗地合 格的区域,同时在检测出洗地不合格的区域后,洗地机能立刻原路倒退至没有洗地合格区 域重新清洗至干净为止,不同于现有技术在统计完所有区域后在重新规划路径的是,本发 明不会增加洗地机没有必要的运动距离,提高了洗地机工作效率、大幅缩短洗地机行走距 离。 除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。 下面将参照附图,对本发明作进一步详细的说明。 附图说明 构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实 施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1是本发明优选实施例的防疫消毒清洁机器人消毒清洁作业效果检测方法流程 示意图。 5 CN 111568321 A 说 明 书 3/7 页 图2是防疫消毒清洁机器人主视示意图。 图3是所述防疫消毒清洁机器人无人驾驶系统组成示意图。 图4为本发明优选实施例中亮度参数求取流程示意图。 图5是本发明优选实施例中污渍面积及数量求取流程示意图。 图6是本发明优选实施例中清洁效果判定流程示意图。 图7为本发明优选实施例的防疫消毒清洁机器人消毒清洁作业效果检测装置示意 图。 图中:1、刷盘总成;2、轮毂电机;3、转向装置;4、吸水总成;5、刷盘推杆;6、吸水扒 推杆;7、行走轮;8、行走机体;9、喷雾消毒装置;10、方向盘;11、无人驾驶系统;12、水箱总 成;13、电气控制系统;14、前下超声波传感器;15、固态面阵雷达;16、单线激光雷达;17、前 上超声波雷达;18、前深度相机;19、侧超声波传感器;20、惯性测量单元;21、多线激光雷达; 22、后深度相机;23、后超声波传感器;24、工控机。











