
技术摘要:
本发明提出一种传感器调度行为树模型的建模方法,旨在提供一种可靠度高,具有复用性和扩展性的建模方法。本发明通过下述技术方案予以实现:基于行为树,采用行为树描述传感器调度流程的调度器,将行为树的条件节点分为外部条件节点和传感器条件节点,并进行参数化定义 全部
背景技术:
随着传感器种类及功能复杂化,传感器调度的种类和流程也变得越来越复杂,需 要一种行为建模方法对传感器调度行为进行规范化描述。结构化文本、离散Petri网和有限 状态机都是行为描述的方法。结构化文本是通过结构化语言(如脚本、C语言等)形式进行行 为描述,传感器调度算法的研究人员多属于电子专业从业者,以计算机语言方式进行描述, 其直观性和操作性较差,此外也难以表达传感器调度之间的复杂关系,如执行传感器协同 时边干扰边跟踪的并行行为关系。离散Petri网是对离散并行系统的数学表示,可描述异步 和并发行为,但抽象程度较高,只能被专业技术人员掌握,对制定传感器调度策略的指挥人 员不友好,因此影响传感器调度行为建模方法的应用和推广。 有限状态机用来表示有限个状态以及在这些状态之间发生的转移、变化等行为。 这种方法能清楚的描述传感器系统生命周期的不同状态,但模块化程度低、行为重用性差、 “一步控制”等缺点,不利于在仿真系统中对传感器行为监控、调试和迭代开发。 行为树BT(BehaviorTrees)是一种能够用于系统行为建模的新方法,因其具有严 格的形式语义、方便的图形语法及良好的层次特性而被越来越多的领域所使用。行为树是 一种形式化的图形建模语言,主要用于系统和软件工程。行为树采用明确定义的符号来明 确表示数百甚至数千种自然语言需求,这些需求通常用于表达大规模软件集成系统的利益 相关者需求。行为树作为一种具有严格形式语义的形式化方法用于保护系统建模与可靠性 分析计算具有以下优势:基于行为树的建模方法在建模过程中着眼于系统行为及其关系而 忽略隐含在其中的系统状态,其建模思路符合系统设计实现的自然思维,可以复用系统分 析和设计阶段所建模型,建模过程及生成的模型简单。 软件行为树的构建方法有两种。第一种情况为通过设计得到软件行为树,即在软 件设计的同时设计对应的行为树,在这种情况下,软件的主控制行为与设计得到的行为树 是完全一致的,这个行为树是完全行为树。第二情况是通过记录软件的运行踪迹,并依照某 种算法规则从软件的行为记录中得到行为树。这种行为树在结构上讲是设计行为树的子 树,其主要用于无法得到完整行为树的情况,而且软件使用的次数越多、运行的越充分,通 过其得到的行为树与通过设计得到的行为树就越接近。软件行为树建立之后,软件运行过 程中将依据监控结果判断是否在按照行为树运行,如果运行过程中出现了不是行为树内的 节点,则将对此节点通过自调节策略使其回归到正常行为树运行,同时扩充软件行为树并 将此行为节点的自调节方法节点加入到策略库中。
技术实现要素:
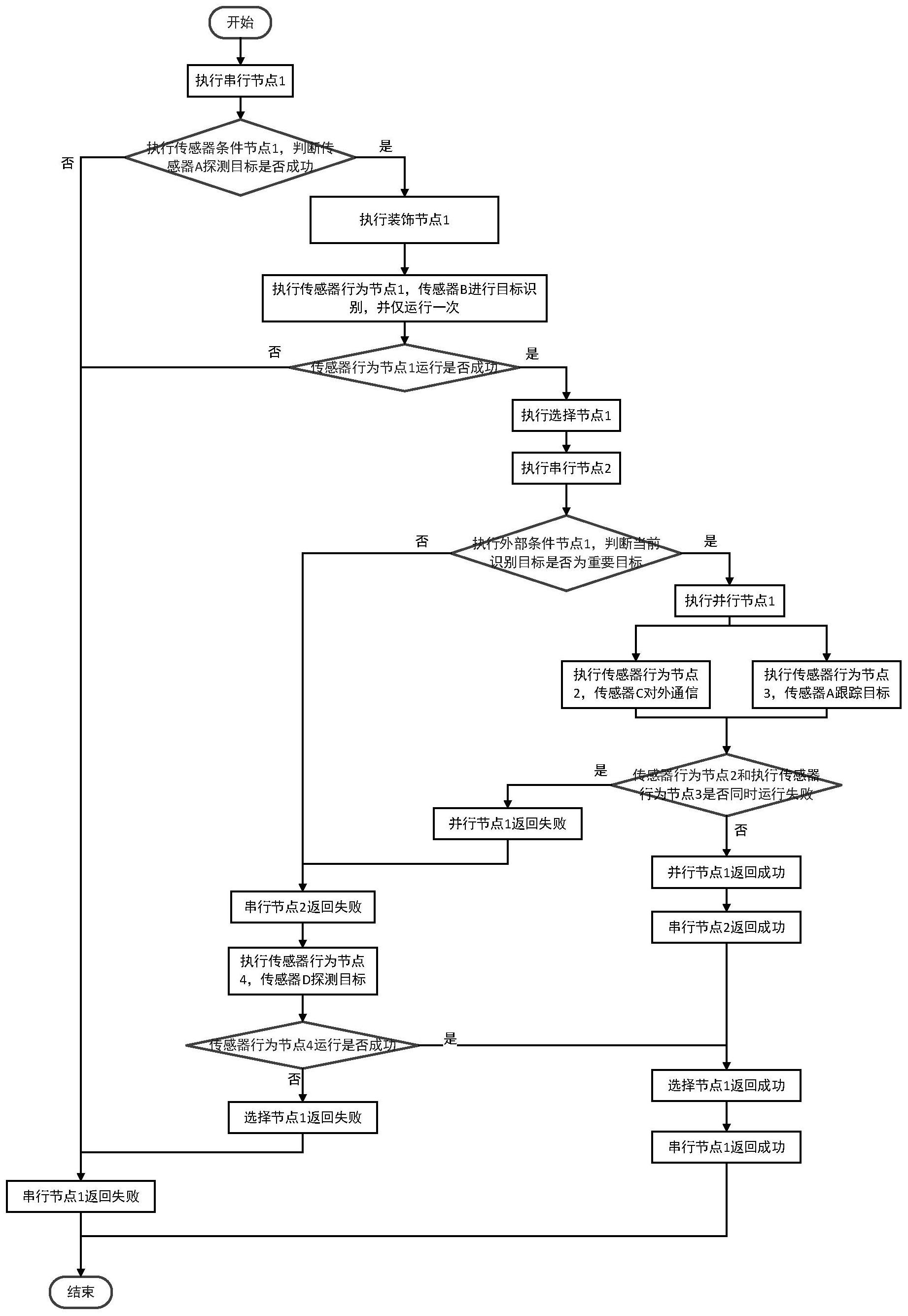
本发明的目的是针对结构化文本、离散Petri网和有限状态机建模方法的不足之 处,提供一种可靠度高,具有复用性和扩展性,能够方便在仿真系统工程对传感器模型功能 4 CN 111611679 A 说 明 书 2/6 页 的复用和扩展,同时具备更友好易于理解的图形交互操作界面,使用户能基于任务策略层 面设计传感器行为调度方法。 本发明的上述目的可以通过以下措施来达到,一种传感器调度行为树模型的建模 方法,具有如下特征:基于行为树,采用行为树描述传感器调度流程的调度器,调度器管理 基于事件的行为树,对所有需要更新的行为进行集中式管理,增加传感器行为状态,将行为 树的条件节点分为外部条件节点和传感器条件节点,传感器系统以外的实体或环境产生的 条件描述为外部条件节点,并进行参数化定义;传感器系统自身产生的条件描述为传感器 条件节点,并进行参数化定义;利用外部环境模型和传感器模型的触发条件接口标准化,提 升传感器系统迭代开发过程中的复用性和扩展性;行为节点扩展为传感器行为节点,行为 树模型描述传感器调度过程,在传感器系统仿真的每个时间步长,遍历传感器调度行为树 模型,调度的主体为传感器具体的行为动作,根据传感器的工作特点,添加无效、中断、未开 始的传感器行为状态,对传感器行为节点进行参数化定义,完成传感器调度行为树模型的 建模。 本发明具有如下特点及有益效果: 可靠度高。本发明基于行为树,采用行为树描述传感器调度流程的调度器,调度器管理 基于事件的行为树,对所有需要更新的行为进行集中式管理,增加传感器行为状态,采用行 为树模型描述传感器调度过程,在系统仿真的每个时间步长,遍历传感器调度行为树模型, 调度的主体为传感器具体的行为动作,根据传感器的工作特点,添加无效、中断、未开始的 传感器行为状态,更真实的反映了传感器调度过程中出现的各种情况,使整个调度过程更 加可靠度高、直观,易于用户理解和编辑。 复用性和扩展性。本发明将传统行为树的条件节点分为外部条件节点和传感器条 件节点,并进行参数化定义,使外部环境模型和传感器模型的触发条件接口标准化,将传感 器执行动作和触发条件模块化,能够方便在仿真系统工程对传感器模型功能的复用和扩 展。使仿真系统工程在迭代开发时,具备更好的扩展性和复用性。通过提高传感器仿真建模 接口的规范程度,提升了仿真系统迭代开发过程中的复用性和扩展性;能够在仿真过程中 以直观友好的描述方式对传感器行为调度进行可视化建模, 本发明在传统行为树的基础上,采用行为树描述传感器调度流程,将条件节点扩展为 外部条件节点和传感器条件节点,将行为节点扩展为传感器行为节点,增加传感器行为状 态。行为树模型描述传感器调度过程,将传感器行为节点进行参数化定义,使传感器模型的 行为动作接口标准化,提升系统迭代开发过程中的复用性和扩展性。使用户能基于任务策 略层面设计传感器行为调度。 附图说明 下面结合附图和实施例对本发明进一步说明。 图1是本发明的传感器调度流程示意图。 图2是本发明的传感器调度行为树模型的可视化示意图。











