
技术摘要:
本发明提供一种激光加工装置,其对工件的所希望的焊接位置照射激光来进行焊接加工。激光加工装置(1)具有:扫描仪(4),其对工件(10)照射激光;机器人(2),其使扫描仪移动;机器人控制装置(5),其控制机器人;以及扫描仪控制装置(6),其控制扫描仪来控制激光的照射位置, 全部
背景技术:
将加尔瓦诺扫描仪安装于机器人的前端(机械手部分)进行激光焊接的长距离激 光焊接机器人系统受到关注并被实用化。通过该技术可以不停地移动机器人,同时对任意 形状进行焊接。 为了实现这一点而从机器人控制装置向扫描仪控制装置发送动作中的机器人的 位置姿势信息,在扫描仪控制装置内考虑机器人的动作来制作路径。这里,机器人控制装置 有机器人的移动指令的程序,对机器人的电动机进行控制。扫描仪控制装置有记载了激光 的照射位置与激光的输出条件(功率)的程序,对扫描仪的电动机与激光的输出进行控制。 (参照专利文献1) 这样,通过实时对扫描仪控制装置发送机器人的TCP(Tool Center Point:工具前 端点)的位置姿势信息,能够在机器人移动的同时对所希望的位置进行焊接(所谓的运行中 (On The Fly)控制)。 控制机器人的机器人控制装置与控制激光扫描仪的扫描仪控制装置分开设置,独 立地控制各自的动作。因此,难以使机器人与激光扫描仪严密地协作来进行控制,相对于机 器人的动作,激光扫描仪的动作产生控制延迟。此外,还存在从机器人的各轴的电动机的指 令位置姿势信息中无法观测的机械弯曲。因此,存在有时激光的照射位置从所希望的焊接 位置略微偏移这样的问题。 专利文献1:日本特开2007-283402号
技术实现要素:
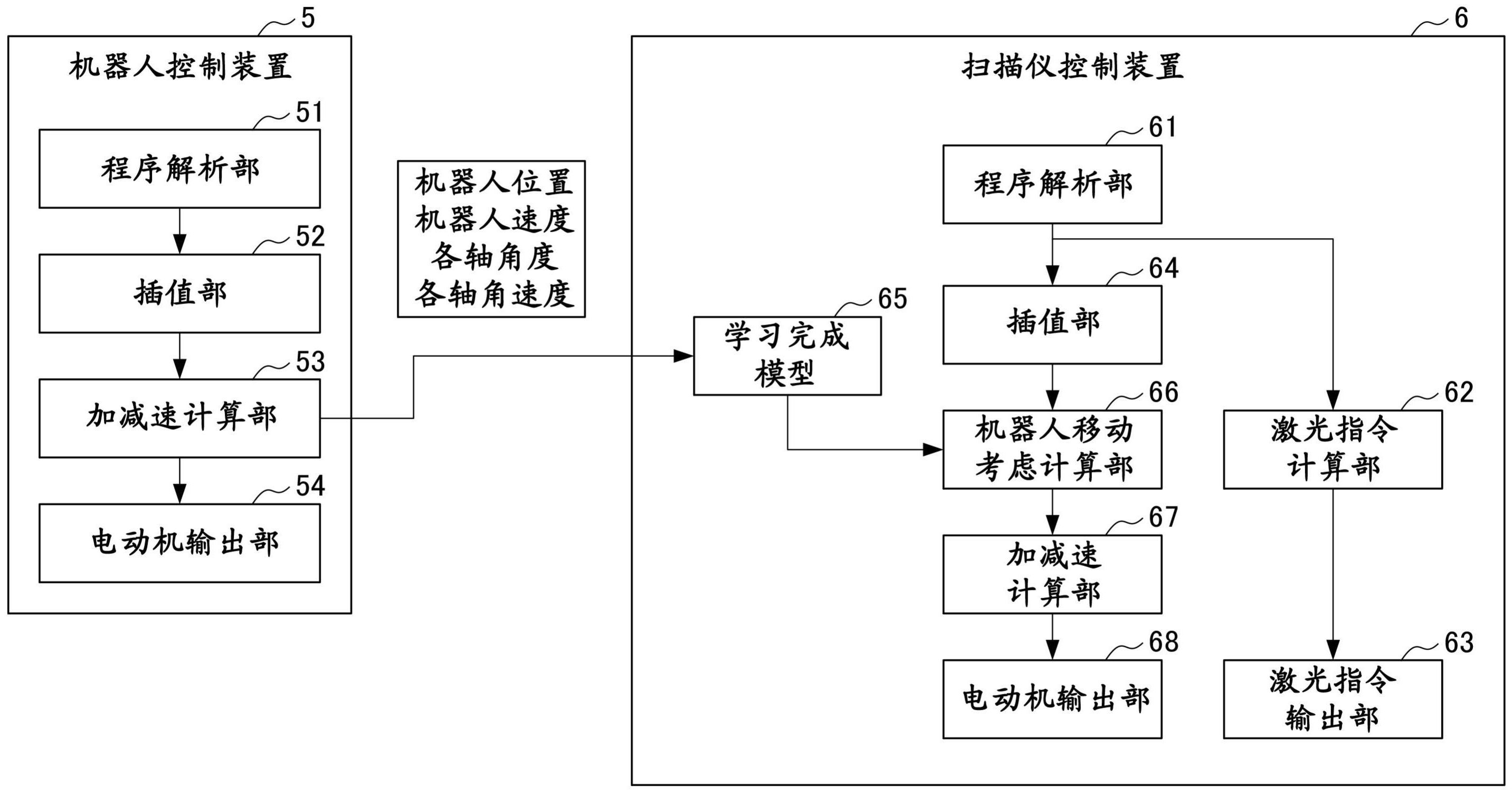
因此,希望在长距离激光焊接机器人系统中,将激光照射到所希望的焊接位置来 进行焊接加工。 (1)本公开的一个方式提供一种激光加工装置,具有:激光照射装置,其对工件照 射激光;机器人,其在装配了所述激光照射装置的状态下相对于所述工件移动;激光照射控 制装置,其控制所述激光照射装置来控制所述激光的照射位置;以及机器人控制装置,其控 制所述机器人来控制所装配的所述激光照射装置的位置以及姿势中的至少一方,所述机器 人控制装置具有:反馈部,其将驱动信息发送给所述激光照射控制装置,所述驱动信息包含 对所装配的所述激光照射装置的位置以及姿势中的至少一方进行控制的所述机器人的指 令位置以及姿势的信息和指令速度有关的信息,所述激光照射控制装置具有:通过训练数 据预先进行有监督学习而获得的学习完成模型,所述训练数据将通过所述机器人控制装置 使所装配的所述激光照射装置预先以多个方向以及速度移动时的所述机器人有关的驱动 信息设为输入数据,将此时的所装配的所述激光照射装置的实际位置数据与实际姿势数据 设为正确数据;以及校正部,其基于通过所述学习完成模型根据从所述反馈部接收到的所 3 CN 111604589 A 说 明 书 2/9 页 述驱动信息实时计算出的所述激光照射装置的实际位置数据与实际姿势数据,来校正所述 激光的照射位置。 根据一个方式,在长距离激光焊接机器人系统中,可以对工件的所希望的焊接位 置照射激光来进行焊接加工。 附图说明 图1是表示激光加工装置的整体结构的框图。 图2是对激光加工装置中的扫描仪的光学系统进行说明的图。 图3是对图1所示的扫描仪的其他光学系统进行说明的图。 图4A是对图3所示的扫描仪的其他光学系统进行说明的图。 图4B是对图3所示的扫描仪的其他光学系统进行说明的图。 图4C是对图3所示的扫描仪的其他光学系统进行说明的图。 图4D是对图3所示的扫描仪的其他光学系统进行说明的图。 图5是表示图1所示的机器人控制装置以及扫描仪控制装置的结构的图。 图6是表示图5所示的扫描仪控制装置具有的学习完成模型的一例的图。 图7是表示机器学习有关的激光加工装置的结构的图。 符号说明 1 激光加工装置; 2 机器人; 3 激光振荡器; 4 扫描仪; 41,42 电镜; 41a,42a 加尔瓦诺电动机; 5 机器人控制装置; 51 程序解析部; 52 插值部; 53 加减速计算部; 54 电动机输出部; 6 扫描仪控制装置; 61 程序解析部; 62 激光指令计算部; 63 激光指令输出部; 64 插值部; 65 学习完成模型; 66 机器人移动考虑计算部; 67 加减速计算部; 68 电动机输出部; 7 机器学习装置; 71 驱动信息取得部; 4 CN 111604589 A 说 明 书 3/9 页 72 实际位置姿势信息取得部; 73 机器学习部; 10 工件; L 激光。











