
技术摘要:
本发明涉及激光雷达测量技术领域,具体涉及一种基于激光雷达的车辆排队测量方法,包括过滤靠近地面的点云、基于K‑means算法计算车辆长度、基于聚类算法和激光雷达反射强度确定汽车位置。本发明的有益效果:能够快速滤除地面点云,排除不相关的噪点干扰,可靠性性高, 全部
背景技术:
激光雷达是激光主动探测传感器设备的一种统称。对于测量成像激光雷达,其主 要工作原理是通过高频测距和扫描测角实现对目标轮廓三维扫描测量(成像)。测量成像激 光雷达主要包括测量型LiDAR和导航型LiDAR两个大类。测量型LiDAR主要用于高精度测图; 导航型LiDAR主要用于智能车、机器人和飞行设备的导航避障。两类产品的测量原理和技术 基础相近,主要区别在于作业方式、探测距离和测量精度的差异。导航型LiDAR产品以探测 距离、测距/测角量精度和探测成像灰度为代价,换取了设备尺寸重量降低和激光扫描线数 增加。另外,导航型LiDAR通过多条扫描线实现对目标三维轮廓测量。相比摄像头、超声波雷 达和毫米波雷达等的辅助驾驶传感器,激光雷达是真正具备空间三维分辨能力的“智能车 之眼”。 传统的激光雷达滤除地面算法主要采用的是基于PCL的RANSAC算法, RANSAC是 “Random Sample Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测 数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概 率得出一个合理的结果;为了提高概率必须提高迭代次数。 RANSAC的基本假设是: (1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释; (2)“局外点”是不能适应该模型的数据; (3)除此之外的数据属于噪声。 局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。 RANSAC 也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该 模型能够解释或者适用于局内点。通过PCL的RANSAC滤波算法要设置一定的距离阈值,无论 阈值设置过大过小都不好,设置太小哦啊,不能很好的把地面滤除干净,设置过大,会把其 他物体的点云一并滤除掉。
技术实现要素:
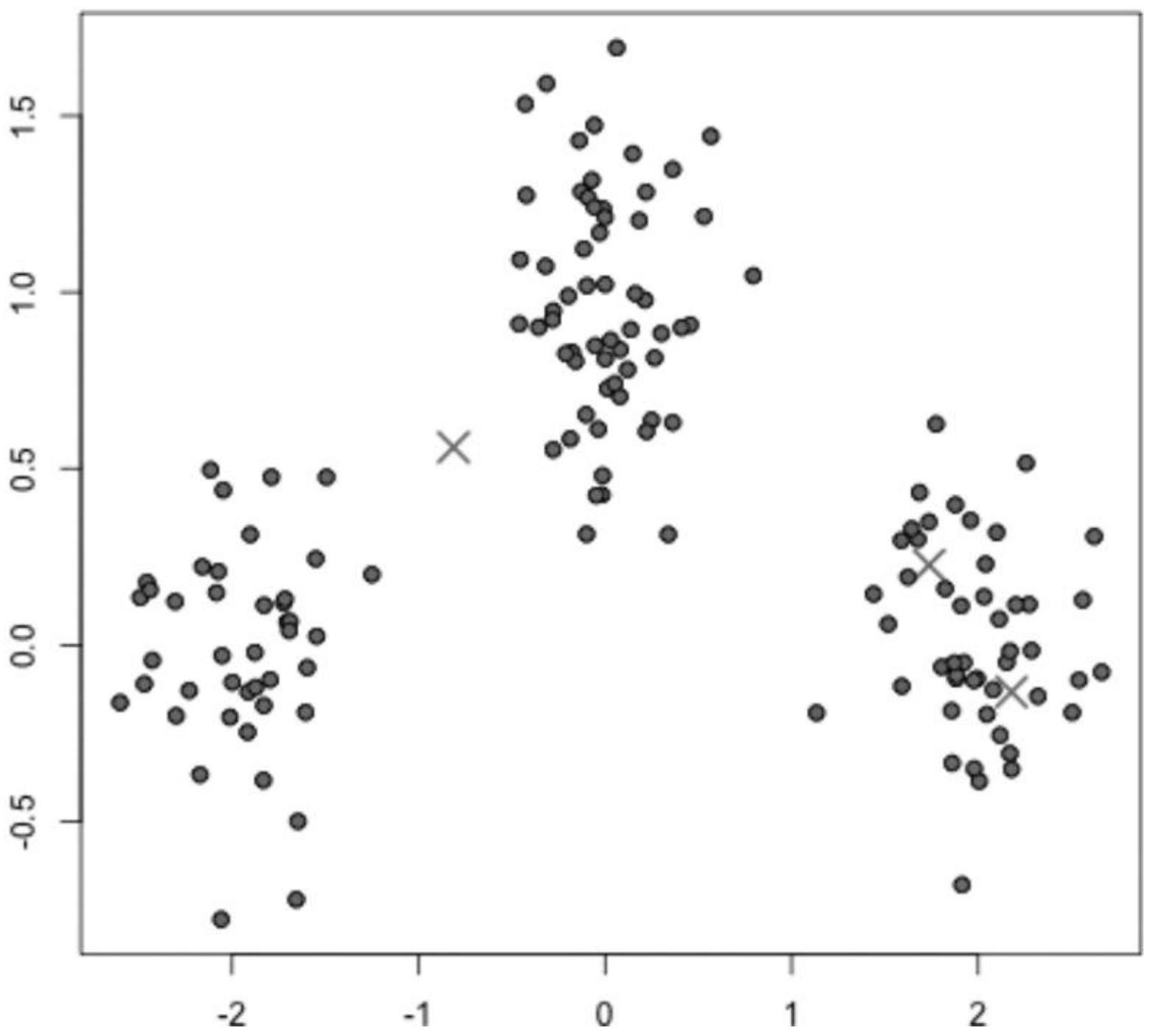
本发明的目的在于克服现有技术中存在的问题,提供一种基于激光雷达的车辆排 队测量方法,它可以实现至少一定程度上解决现有技术的问题。 为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现的: 一种基于激光雷达的车辆排队测量方法,包括: 1)过滤靠近地面的点云,包括如下步骤: 利用多线程激光雷达滤除地面过程中借助RANSAC算法,和激光雷达高度夹角信息 对地面点云进行滤除操作,然后获取道路上层的点云信息; 3 CN 111596309 A 说 明 书 2/3 页 2)基于K-means算法计算车辆长度,包括如下步骤: 2.1)选择一些类/组,并随机初始化它们各自的中心点; 2.2)计算每个数据点到中心点的距离,数据点距离哪个中心点最近就划分到哪一 类中; 2.3)计算每一类中中心点作为新的中心点; 2.4)重复以上步骤,直到每一类中心在每次迭代后变化不大为止; 3)基于聚类算法和激光雷达反射强度确定汽车位置,多线程激光雷达输出的数据 点云格式为(x,y,r),x和y为扫描点的坐标值,r为反射强度。 作为如上所述技术方案的进一步优化,所述步骤1)中,通过多线程激光雷达中每 个线程到地面的直线距离来过滤点云。 作为如上所述技术方案的进一步优化,所述步骤3)中,多线程激光雷达的反射强 度取值为(0,255)。 本发明的有益效果:能够快速滤除地面点云,排除不相关的噪点干扰,可靠性性 高,精度高,适应面广泛,计算车辆排队长度准确,误差较小。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领 域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附 图。 图1为本发明中基于K-means算法计算车辆长度步骤的演示图; 图2为本发明中基于聚类算法和激光雷达反射强度确定汽车位置步骤的演示图。











