
技术摘要:
一种避免共享自动驾驶车辆出行延误的驾驶方案,通过移动终端、云端和共享自动驾驶车辆之间的实时信息传输提供了共享自动驾驶车辆出行服务的路线规划及路径规划的细化设计,基于历史回传数据预测行程,精确制定行程方案,从源头预防行程延误,另外还通过自动驾驶汽车和 全部
背景技术:
共享自动驾驶车辆是能够实现用户移动终端、云端控制中心和道路上其自身之间 的通讯,且能被用户通过移动终端预约的自动驾驶车辆,用户能够通过预约上下车地点及 时间的方式,使用共享自动驾驶车辆出行。当云端控制中心接到用户预约时,就可以为用户 调配车辆,并通过共享自动驾驶车辆为用户提供高质量的自动驾驶车辆共享服务。 现有的共享自动驾驶方案大多只涉及如何实现自动驾驶车辆共享服务,并未涉及 路线和路径规划的细节以及共享服务的准时性。
技术实现要素:
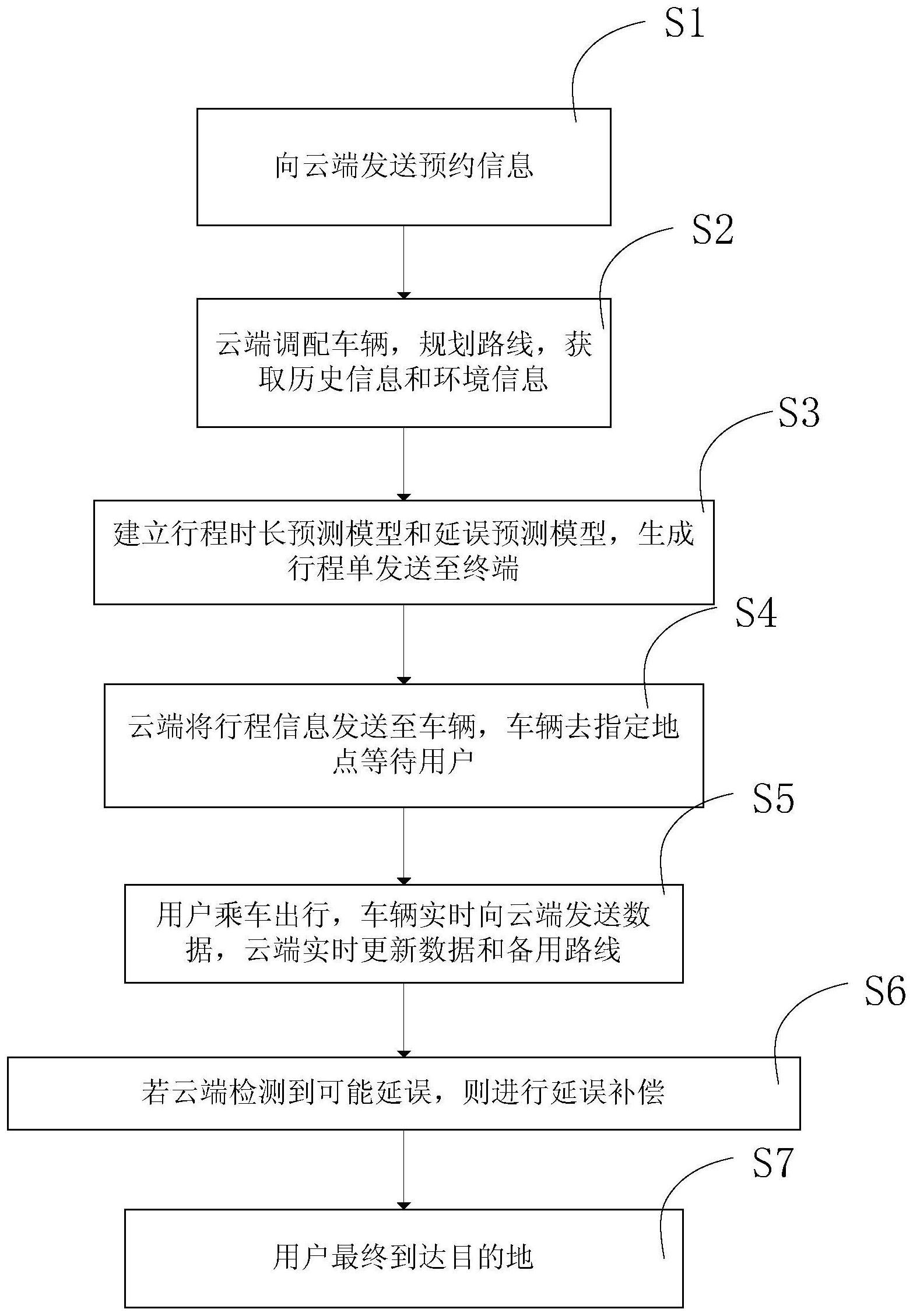
有鉴于此,本发明提供了一种大大提升共享自动驾驶车辆出行智能化程度的方 案。 本发明提供的避免共享自动驾驶车辆出行延误的驾驶方案包括以下步骤: S1:向云端发送车辆预约信息; S2:根据车辆预约信息调配车辆并在导航地图上规划行驶路线,根据规划的行驶 路线获取历史车辆行驶信息和道路环境信息; S3:根据车辆预约信息、历史车辆行驶信息和道路环境信息建立行程时长预测模 型Ti和延误预测模型Ti-delay,并根据行程时长预测模型Ti和延误预测模型Ti-delay预估整个 行程的行程时长T,生成指向用户的行程单,该行程单中包括若干可选路线及对应的上车时 间和上车地点; S4:根据选定的路线生成指向车辆的车辆行程信息,将车辆行程信息发送至指定 车辆,控制指定车辆根据车辆行程信息等候用户; S5:乘坐指定车辆出行,指定车辆在行驶途中实时向云端发送自车行驶信息和车 载传感器探测到的道路环境信息,云端实时更新并监测行程时长预测模型Ti、延误预测模 型Ti-delay; S6:若云端监测到行驶过程中存在延误,则通过控制控制指定车辆或为用户重新 调配其他车辆进行行程延误补偿,直到云端监测到行程不再延误; S7:用户到达目的地。 进一步地,步骤S1中的车辆预约信息包括行程起点、行程终点和预期到达时间。 进一步地,步骤S2中的道路环境信息包括由历史自动驾驶车辆的传感器探测并发 回的固定障碍物信息和目标物信息,步骤S2中的历史车辆行驶信息包括历史自动驾驶车辆 发回的其驶过指定区段的车速、行驶轨迹和车身姿态。 进一步地,步骤S3中的建立行程时长预测模型Ti包括以下步骤: 4 CN 111598276 A 说 明 书 2/5 页 将规划的行驶路线划分为n个区段,两个相邻区段之间的连接点定义为节点i; 根据历史车辆行驶信息,统计相同外界条件下自动驾驶车辆通过某个区段所消耗 的时间; 根据统计结果,初步建立该区段的历史时长预测模型; 根据道路环境信息对历史时长预测模型进行修正和验证,得到修正后该区段的行 程时长预测模型Ti=f(t0,t1,…,tn)。 进一步地,所述外界条件包括天气、时间段和日期。 进一步地,步骤S3中建立延误预测模型Ti-delay包括以下步骤: 将规划的行驶路线划分为n个区段,将两个相邻区段之间的连接点定义为节点i; 根据历史车辆行驶信息,对所有区段内的车流量等级进行标定,统计不同车流量 等级下自动驾驶车辆通过某个区段的延误时长; 根据统计结果,初步建立该区段的历史延误预测模型; 根据道路环境信息对历史延误预测模型进行修正和验证,得到修正后该区段的延 误预测模型Ti-delay=f(t0-delay,t1-delay,…,tm-delay)。 进一步地,步骤S5中的车辆行程信息包括用户上车地点、用户下车地点,行程中对 应的道路区段序列、任意区段内的行驶路径信息、各个路径下的行驶车速区间信息和车身 姿态信息。 进一步地,步骤S7中的行程延误补偿包括以下步骤: 若预估延误情况严重,则启用行程时长预测模型和延误预测模型中用时最短的备 用路线,控制指定车辆驶入备用路线,并允许其在可加速和/或超车的区段内适当加速和/ 或超车行驶; 若预估延误情况不严重,则根据行程时长预测模型和延误预测模型预估后续区段 的车流量等级,重新预估指定车辆行驶通过后续区段所需时长,并比较按照原路线的行程 时长和备用路线的行程时长,当备用路线的行程时长更短时则驶入备用路线,否则按照原 路线继续行驶,并允许其在可加速和/或超车的区段内适当加速和/或超车行驶; 若指定车辆在当前或已经行驶过的任意区段内的延误超过预标定的延误阈值,则 控制指定车辆在该区段或后续的其他区段内进行安全加速和/或变道等驾驶行为,并实时 计算上述驾驶行为是否确保准时完成行程。 进一步地,所述延误情况严重包括突发事件导致任意后续区段Xi禁止通行;所述 延误情况不严重包括突发事件导致任意后续区段Xi内可行驶车道数变少。 进一步地,步骤S8中的延误补偿还包括在指定车辆身处拥堵路段时预估拥堵时长 进行延误补偿,其过程如下: 若指定车辆已处于拥堵路段,则计算自车在拥堵路段行驶的平均速度,并根据突 发事件发生地点计算自车与突发事件发生地点的距离,然后计算并评估自车通过该拥堵路 段的拥堵时长; 若拥堵时长能够在后续区段中得到补偿,能够确保准时完成行程,则继续在拥堵 路段行驶,控制自车在该区段或后续的其他区段内进行安全加速和/或变道等驾驶行为; 若拥堵时长不能在后续区段中得到补偿,不能确保准时完成行程,则向云端发送 延误警报,云端在收到延误警报后,为用户进行车辆调配,并重新规划剩余行程,待用户更 5 CN 111598276 A 说 明 书 3/5 页 换车辆后,继续完成剩余行程。 本发明通过移动终端、云端和共享自动驾驶车辆之间的实时信息传输提供了共享 自动驾驶车辆出行服务的路线规划及路径规划的细化设计,基于历史回传数据预测行程, 精确制定行程方案,从源头预防行程延误,另外还通过自动驾驶汽车和云端实时监控并计 算行程,当监测到延误可能时,则采取一定措施,在行程进行期间避免发生行程延误,大大 提升了共享自动驾驶车辆出行的智能化程度。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够 更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。 附图说明 图1为本发明提供的避免共享自动驾驶车辆出行延误的驾驶方案的流程图。 图2为本发明提供的驾驶方案在因突发事件导致行程延误时进行的补偿流程示意 图。 图3为本发明提供的驾驶方案在延误超过标定阈值时进行的行程延误补偿流程示 意图。 图4为本发明提供的驾驶方案在道路拥堵导致延误时进行的补偿流程示意图。











