
技术摘要:
本发明公开了一种多自由度人因工程振动平台远程智能监控系统,包括多自由度振动平台、交换机、控制器、伺服驱动器、伺服电机、传动装置、位移与加速度反馈环节、急停按钮、报警装置、无线WIFI发射器、无线接收器、主控计算机、远程计算机和直流电源模块。加装和主控计 全部
背景技术:
车辆、船舶及载人航空器等在使用过程中会引发乘坐环境振动,处于振动环境中 的人体,其生理和心理健康都会受到严重影响。因此,振动环境下的人因工程问题日益引起 工业界和科研院所的关注。由于多自由度人因工程振动平台可以更真实地模拟人体在各种 振动环境下的工况,所以被广泛应用于相关领域的人体振动与人机交互模拟研究中。 由于多自由度人因工程振动平台是涉及参试人员的大型机电设备,其振动试验的 危险性较高,尤其在振动信号调试阶段,可能出现的突发情况易使试验人员的安全受到威 胁。传统的有线远程控制方式虽可使试验操控人员的安全得到一定程度的保障,但主控计 算机与振动平台的线缆较长,不利于试验现场的数据采集及线缆规范排布,且使得系统维 护困难,长期使用易导致线路老化从而引起安全事故。 此外,在振动试验中,虽然参试人员手中一直握有安全急停按钮,但异常情况的发 生具有突发性,如果参试人员反应不及时,也会存在安全隐患,因此,实时监测振动平台的 运行状态,可在设备出现突发异常情况时,系统自动激活保护程序发出预警,并执行安全急 停操作,使试验过程中的人员和设备安全性得到进一步保障。
技术实现要素:
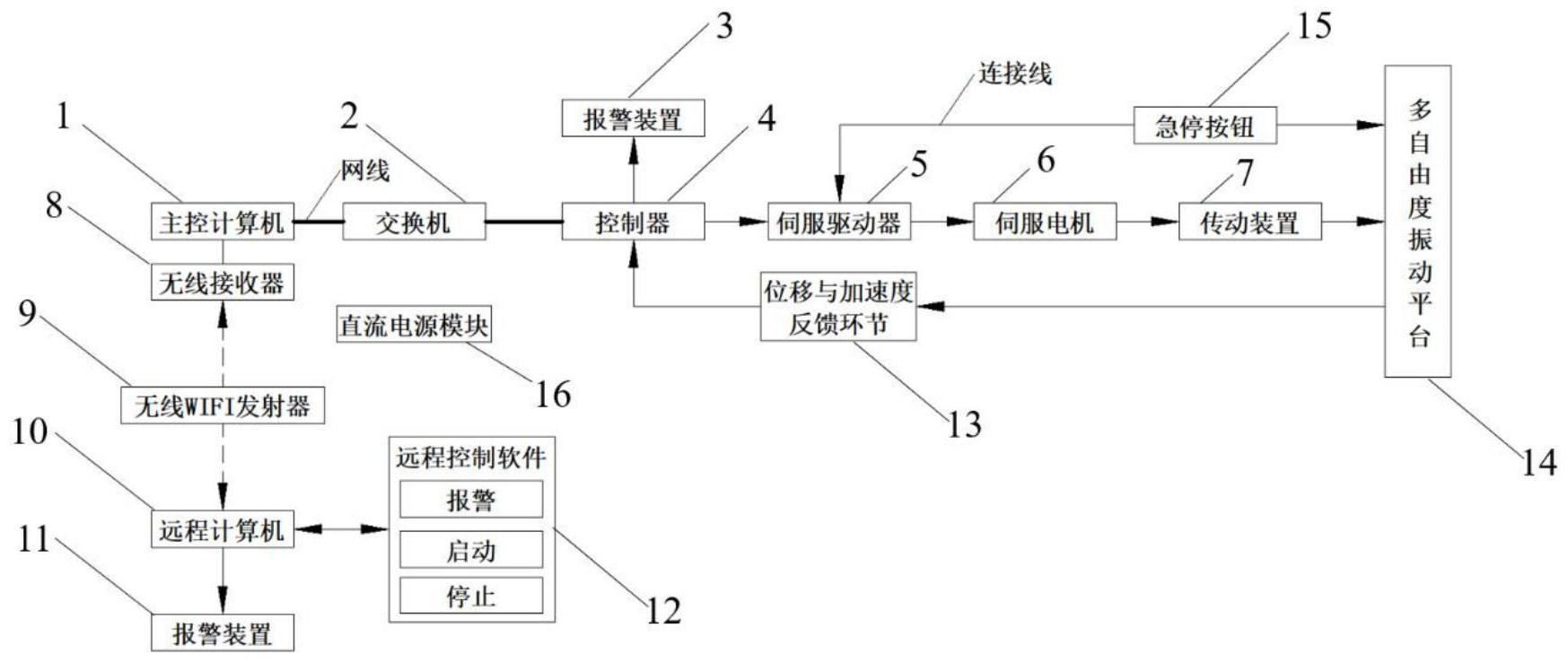
为了改善上述情况,本发明一种多自由度人因工程振动平台远程智能监控系统提 供了一套结合无线WIFI通讯技术实现对多自由度人因工程振动平台的远程控制与智能急 停的试验装置,通过操作远程计算机实现对多自由度振动平台的实时控制,提高了设备运 行安全指标,并通过实时监测振动平台运行状态实现智能急停,对人机交互参试人员的安 全性提供进一步保障。特别涉及一种结合无线WIFI通讯技术对多自由度人因工程振动平台 进行远程控制,并通过实时监测振动状态实现智能急停的智能监控系统。 本发明提供了一种多自由度人因工程振动平台远程智能监控系统,该系统包括多 自由度振动平台、交换机、控制器、伺服驱动器、伺服电机、传动装置、位移与加速度反馈环 节、急停按钮、报警装置、无线WIFI发射器、无线接收器、主控计算机、远程计算机和直流电 源模块。所述主控计算机通过网线与交换机相连接,所述交换机通过网线与控制器相连接, 所述控制器与伺服驱动器相连接,所述伺服驱动器与伺服电机相连接,所述伺服电机通过 传动装置与多自由度振动平台相连接进而组成多自由度振动平台控制系统,在此基础上加 装和主控计算机无线连接的远程计算机,并配置无线WIFI发射器和无线接收器,所述无线 WIFI发射器通过电源供电产生无线网络,所述无线接收器与远程计算机相连接,所述远程 计算机通过无线WIFI通讯技术向主控计算机发送指令以实现远程控制,在振动平台上安装 位移与加速度传感器,形成位移与加速度反馈环节,实时监控振动平台的运行状态以便振 3 CN 111596602 A 说 明 书 2/4 页 动信号出现异常时自动执行安全急停操作,同时控制器根据异常信息控制报警装置发出急 停报警,提高试验过程的安全性。 使用时,远程计算机和主控计算机通过无线WIFI网络进行数据传输。当进行人因 工程振动试验时,将振动平台的底座与地基、试验设备与振动平台固定安装,操作室中的操 控人员在远程计算机的控制软件中设置好振动信号参数,点击远程控制软件界面的启动按 钮,远程控制软件将启动控制指令以TCP通讯协议发送至无线WIFI网络中,主控计算机通过 无线接收器接收到远程计算机发来的启动控制指令,控制振动平台开始启动。首先上位机 软件根据位姿信号对多自由度振动平台进行反解计算,将计算结果通过UDP通讯协议发送 到控制器,控制器将结果传递给伺服驱动器进而驱动伺服电机旋转,通过传动装置最终使 多自由度振动平台产生预期振动,振动力传递给试验设备实现振动激励,通过振动信号的 采集与分析最终完成振动试验。当需要停止振动平台时,操控人员按下远程控制软件上的 停止按钮,远程控制软件将停止控制指令以TCP通讯协议发送至无线WIFI网络中,主控计算 机通过无线接收器接收到远程计算机发来的停止控制指令,控制振动平台停止运行,即终 止通过UDP通讯协议向控制器发送数据的线程,使多自由度振动平台停止振动。所述远程计 算机可以改为智能手机,远程控制软件也可以写成手机APP的形式,远程传输的距离也可以 通过增设无线路由器的方式进行扩增,达到结合无线WIFI通讯技术对多自由度振动平台进 行远程控制的目的。 进一步地,控制器根据振动平台的最大行程设置位移的安全阈值,根据人体所能 承受的冲击载荷设置加速度的安全阈值,振动平台的位移与加速度信号通过反馈环节实时 传递到控制器,当振动平台的位移与加速度其一超出安全阈值时控制器将自动激活保护程 序并执行安全急停操作,同时控制器根据异常信息控制报警装置发出急停报警信息,以提 高试验过程的安全性,现场维护工程人员也能及时接到报警信息并进行针对性地维护。 进一步地,当振动平台出现急停报警时,控制器将报警信息发送至主控计算机,进 而通过无线网络发送至远程计算机并在其控制软件界面自动显示,同时控制报警装置发出 急停报警以使操控人员尽快获得现场情况。 进一步地,该系统设有安全急停按钮,在振动试验过程中,参试人员可根据需要随 时按下手中的安全急停按钮使振动平台停止运行,同时控制器根据异常信息控制报警装置 发出急停报警。 进一步地,所述直流电源模块向控制器与伺服驱动器供电,供电电压均为24V,直 流电源模块设有电网滤波及过载保护环节,以增强振动平台运行的稳定性与安全性。 进一步地,所述直流电源模块向交换机与无线WIFI发射器供电,供电电压为12V或 5V。 本发明的有益效果在于: 本发明利用WIFI信号覆盖范围大的特点,实现操控人员远程遥控人因工程振动平 台完成振动试验,优化了控制系统的设计排布,提高了振动试验操作的安全性。主控计算机 通过UDP通讯协议向控制器发送数据(网线)以提高控制系统的实时性,远程计算机通过TCP 通讯协议向主控计算机发送指令(无线)以提高无线数据传输的可靠性。通过实时监控振动 平台的位移与加速度,实现智能急停与报警功能,提高了试验过程的安全性。 4 CN 111596602 A 说 明 书 3/4 页 附图说明 图1为本发明一种多自由度人因工程振动平台远程智能监控系统的控制系统框 图。 图中为:主控计算机(1),交换机(2),报警装置(3),控制器(4),伺服驱动器(5),伺 服电机(6),传动装置(7),无线接收器(8),无线WIFI发射器(9),远程计算机(10),报警装置 (11),远程控制软件(12),位移与加速度反馈环节(13),多自由度振动平台(14),急停按钮 (15),直流电源模块(16)。











