
技术摘要:
本发明公开了一种电动智能线性伺服横拉杆车辆转向方法和系统,所述方法包括如下步骤:转向系统获取车辆目标转向角和实际转向角;计算目标转向角和实际转向的角度偏差值;根据角度偏差值计算横拉杆的目标位移值;驱动横拉杆以目标位移值移动;所述系统包括:至少两电机 全部
背景技术:
现有技术中,传统的汽车转向系统通常需要转向盘、转向管柱、转向传动轴、带扭 矩角度传感器循环球式转向器、直拉杆、转向弯臂等机械结构才能完成汽车的转向功能。然 而随着智能汽车的发展,智能汽车比如自动驾驶汽车对于汽车转向系统的结构和功能需要 重新设计,也就是说传统的汽车转向系统将不再适合自动驾驶汽车的转向结构需求。请参 考专利公开号为:CN109017974A的专利,在该专利中通过在转向盘底部设置多个齿轮的转 角控制模块、转矩传感器和转角传感器,并将激光雷达和图像信息输入转向系统控制汽车 转向,但上述公开的对比文件的汽车转向系统结构复杂,并且通过齿轮控制汽车转向在汽 车高速运行的情况下精度和响应速度较差,不适用自动驾驶汽车转向高精度和反应灵敏度 的需求,并且上述转向系统容易出现故障,制造成本和维修成本较高。
技术实现要素:
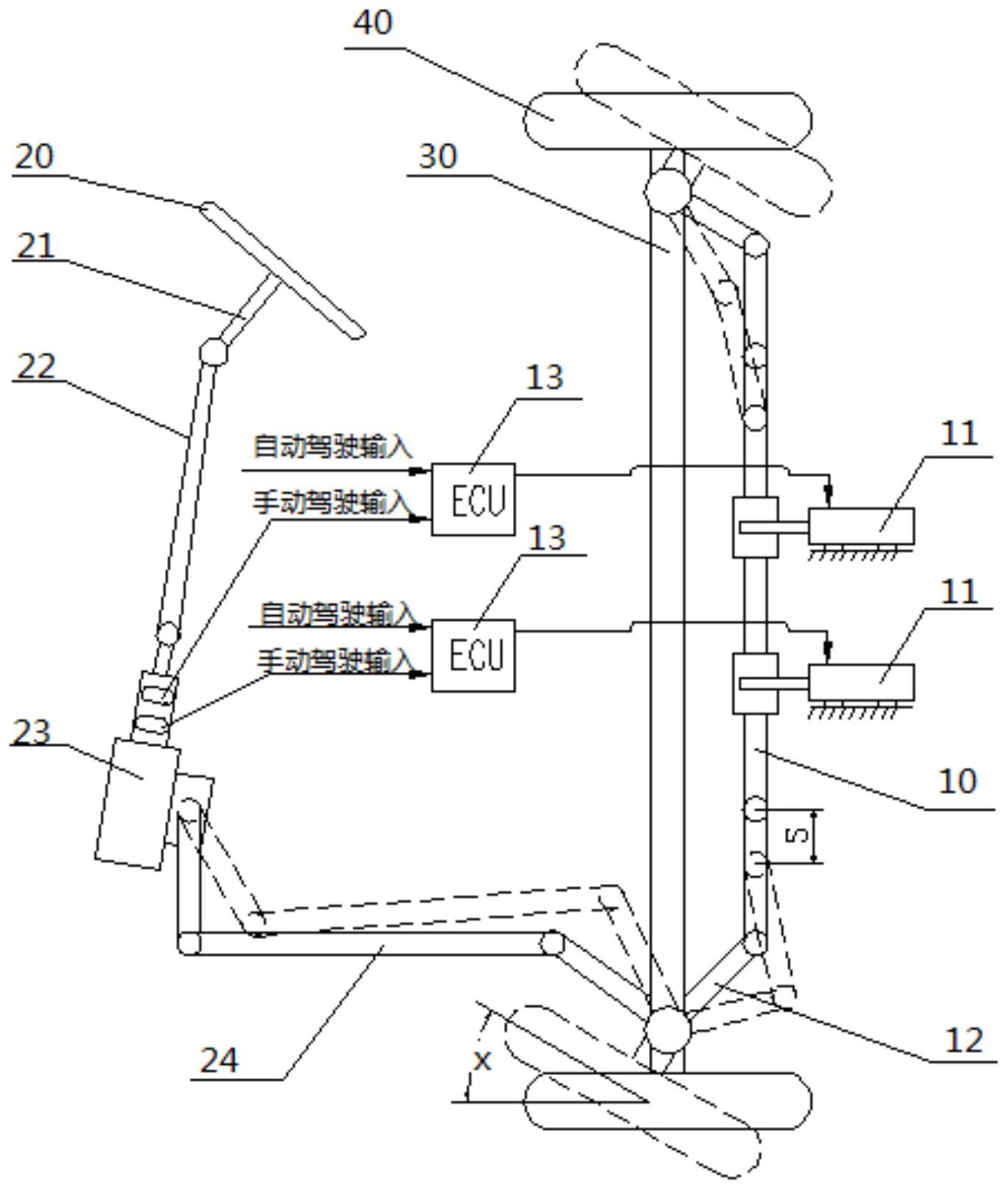
本发明其中一个主要发明目的在于提供一种电动智能线性伺服横拉杆车辆转向 方法和系统,所述方法和系统可无需设置转向盘、转向管柱、转向传动轴、带扭矩角度传感 器循环球式转向器、直拉杆、转向弯臂等机械结构,通过智能线性伺服电机控制横拉杆移动 控制汽车转向角以控制汽车转向,可降低汽车转向系统的制造成本。 本发明另一个主要发明目的在于提供一种电动智能线性伺服横拉杆车辆转向方 法和系统,所述方法和系统通过控制横拉杆的轴向位移,在较少的传动部件下实现车轮转 向,一方面提高转向控制力量,另一方面将转向角计算和控制转化为横拉杆的位移计算和 控制便于提高转向精度和转向的反应灵敏度。 本发明另一个发明目的在于提供一种电动智能线性伺服横拉杆车辆转向方法和 系统,所述方法和系统采用双电机和双ECU控制器,并采用双冗余控制,在正常运行时,双电 机各输出50%功率,当其中一个电机失效时,另一电机可实现100%输出,以保障转向系统 的安全。 本发明另一个发明目的在于提供一种电动智能线性伺服横拉杆车辆转向方法和 系统,所述方法和系统可安装于传统的方向转向系统,可用于传统的方向转向系统功能上 叠加,即可实现主动驾驶和自动驾驶的切换。 本发明其中一个发明目的在于提供一种电动智能线性伺服横拉杆车辆转向方法 和系统,所述系统结构简单,横拉杆和电机之间的连接结构简单,降低安装、维修和制造的 成本。 为了实现至少一个发明目的,本发明提供一种电动智能线性伺服横拉杆车辆转向 方法,包括如下步骤: 3 CN 111605611 A 说 明 书 2/5 页 转向系统获取车辆目标转向角和实际转向角; 计算目标转向角和实际转向的角度偏差值; 根据角度偏差值计算横拉杆的目标位移值; 驱动横拉杆以目标位移值移动。 根据本发明其中一个较佳实施例,根据以下公式计算横拉杆的目标位移值:y=A ∏x B,其中y为横拉杆的目标位移值,x为角度偏差量,A为角度相关参数,∏为圆周率,B为 传动部件相关参数。 根据本发明另一个较佳实施例,所述计算获取角度偏差值后,根据计算的结果将 偏差值计算电机输出电流,转向系统对电机输出计算的电流控制电机转矩以驱动横拉杆移 动至目标位移值。 根据本发明另一个较佳实施例,转向系统对两电机输出50%功率,获取两电机的 工作状态,当其中一电机处于失效状态,则所述转向系统对另一电机输出100%功率。 根据本发明另一个较佳实施例,将转向系统中的电机固定,通过减速机构限制横 拉杆沿着轴向位移。 根据本发明另一个较佳实施例,获取带扭矩角度传感器循环球式转向器的扭矩和 转角,用于获取转向盘上的扭矩和转角,转向系统获取车速,将车速、转向器扭矩和转角输 入电子控制单元,所述电子控制单元根据车速、转向器扭矩和转角对电机输出对应的电流, 以驱动横拉杆轴向位移。 为了实现至少一个上述发明目的,本发明进一步提供一种电动智能线性伺服横拉 杆车辆转向系统,包括: 至少两电机; 横拉杆; 转向臂; 至少两电子控制单元; 所述横拉杆两端分别连接转向臂一端,转向臂另一端分别连接车辆轴杆,所述电 机连接所述横拉杆,所述电子控制单元分别通讯连接所述电机,通过驱动所述电机,用于控 制横拉杆移动。 根据本发明另一较佳实施例,所述转向系统还包括转向盘、转向管柱、转向传动 轴、带扭矩角度传感器循环球式转向器、直拉杆,所述转向盘、转向管柱、转向传动轴、带扭 矩角度传感器循环球式转向器、直拉杆依次连接,并且所述直拉杆连接所述转向臂在车辆 轴杆上的连接端部,用于手动控制车辆转向系统。 根据本发明另一较佳实施例,所述电子控制单元测量带扭矩角度传感器循环球式 转向器的扭矩和转角,计算出对应的驱动电流,所述电子控制单元根据测量的驱动电流对 电机输出。 附图说明 图1显示的是本发明一种电动智能线性伺服横拉杆车辆转向系统较佳实施例的结 构示意图; 图2显示的是本发明一种电动智能线性伺服横拉杆车辆转向方法流程示意图。 4 CN 111605611 A 说 明 书 3/5 页 其中, 横拉杆-10,电机-11,转向臂-12,电子控制单元-13,转向盘-20,转向管柱-21,转 向传动轴-22,带扭矩角度传感器循环球式转向器-23,直拉杆-24,轴杆-30,车轮-40。











