
技术摘要:
本发明提供了一种移动视频与地理场景的融合方法、系统及电子设备,根据无人机相机的位置信息确定出的地形影像数据中选取视频关键帧;提取视频关键帧与地形影像的匹配点;根据所述匹配点坐标和透视变换公式计算出视频关键帧角点的像素坐标,并将所述像素坐标转换为经纬 全部
背景技术:
随着视频技术的不断发展,在不同领域的应用越来越多,比如应急灾害等等,在发 生地震,塌方、泥石流等自然灾害的时候,由于无人机具有成本低、机动性强、安全风险系数 小等优点被广泛应用在地形测绘、倾斜摄影、侦测现场等领域。然而目前常规监控系统,由 于存在海量视频分散、孤立、视角不完整、位置不明确等问题,尤其是移动视频与地理场景 融合、面向安防视频监控以及应急减灾等领域正是从解决此现状问题的角度而衍生。 视频地理场景融合可以更直观、更明确的管理摄像机和掌控视频动态,但是目前 还难以将无人机视频与实际的地理场景联系起来,具体位置不明确、视角不完整等问题,因 此无法提供更为准确的动态画面。 因此,现有技术有待于进一步的改进。
技术实现要素:
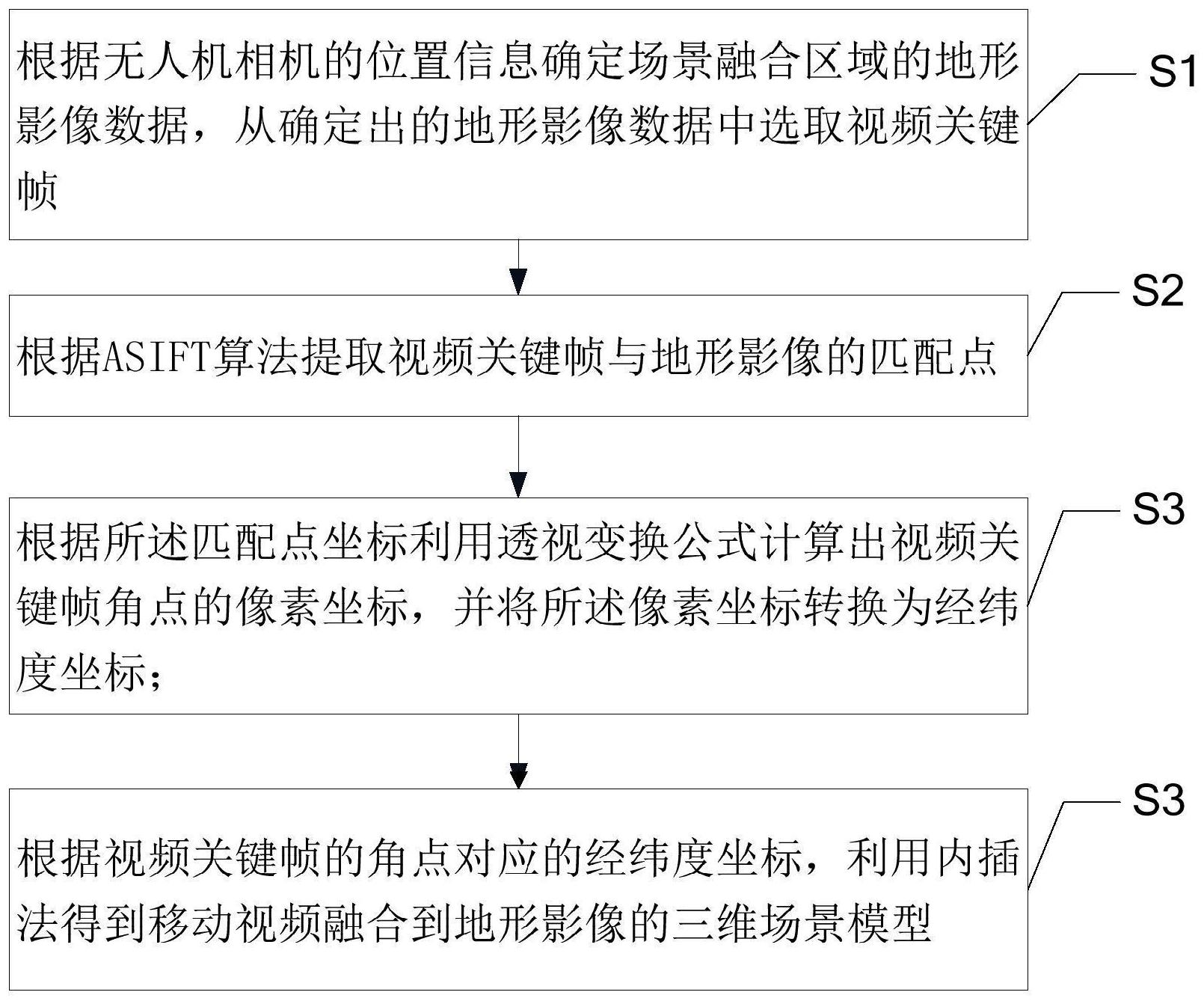
鉴于上述现有技术中的不足之处,本发明的目的在于为用户提供一种移动视频与 地理场景的融合方法、系统及电子设备,克服现有技术中的无人机视频不能实现与地理场 景精确融合的缺陷。 本发明解决技术问题所采用的技术方案如下: 第一方面,本实施例公开了一种移动视频与地理场景的融合方法,其中,包括步 骤: 根据无人机相机的位置信息确定场景融合区域的地形影像数据,以及从无人机采 集的视频图像中选取视频关键帧; 根据ASIFT算法提取视频关键帧与地形影像的匹配点; 根据所述匹配点坐标和透视变换公式计算出视频关键帧角点的像素坐标,并将所 述像素坐标转换为经纬度坐标; 根据视频关键帧角点对应的经纬度坐标,利用内插法得到移动视频融合到地形影 像的三维场景模型。 可选的,所述根据无人机相机的位置信息确定场景融合区域的地形影像数据的步 骤包括: 获取所述无人机相机的初始位置定位场景融合区域的区域信息; 查找是否含有与所述区域信息对应的数字地表模型; 若否,则查找与所述区域信息对应的数字正射影像。 可选的,所述根据ASIFT算法提取视频关键帧与地形影像的匹配点的步骤包括: 从视频关键帧的原始图像中选取采样参数,并使用采样参数模拟不同经度角和纬 4 CN 111582022 A 说 明 书 2/8 页 度角的图像,得到模拟图像; 计算模拟图像的特征; 根据所有模拟图像的特征进行图像匹配。 可选的,所述根据ASIFT算法提取视频关键帧与地形影像的匹配点的步骤之后,还 包括: 使用RANSAC算法剔除错误的匹配点。 可选的,所述使用RANSAC算法剔除错误的匹配点的步骤包括: 从所述匹配点中抽取四对不共线的匹配点,计算出仿射变换矩阵的模型,以及计 算所有匹配点与模型的投影误差; 判断所投影误差是否大于预设阈值,若大于,则将该匹配点剔除。 可选的,所述根据所述匹配点坐标和透视变换公式计算出视频关键帧的角点对应 在地形影像中的像素坐标,并将所述像素坐标转换为经纬度坐标的步骤包括: 根根匹配点坐标计算出视频帧投影到地形影像中的透视变换矩阵; 根据所述透视变换矩阵反算出视频关键帧四个角点在地形影像上对应的像素坐 标; 利用坐标转换公式将所述像素坐标转换为经纬度坐标。 可选的,所述根据视频关键帧的角点对应的经纬度坐标,利用内插法得到移动视 频融合到地形影像的三维场景模型的步骤包括: 根据视频关键帧的角点对应的经纬度坐标,通过内插法得到所有处于所述视频关 键帧中间的中间帧的角点坐标; 根据得到的各个中间帧的角点坐标和视频关键帧的角点坐标,完成视频与地理场 景的融合,得到所述三维场景模型。 第三方面,本实施例公开了一种移动视频与地理场景的融合系统,其中,包括: 关键帧选取模块,用于根据无人机相机的位置信息确定场景融合区域的地形影像 数据,以及从无人机采集的视频图像中选取视频关键帧; 匹配点提取模块,用于根据ASIFT算法提取视频关键帧与地形影像的匹配点; 坐标转换模块,用于根据所述匹配点坐标和透视变换公式计算出视频关键帧角点 的像素坐标,并将所述像素坐标转换为经纬度坐标; 模型建立模块,用于根据视频关键帧的角点对应的经纬度坐标,利用内插法得到 移动视频融合到地形影像的三维场景模型。 第三方面,本实施例公开了一种电子设备,其中,包括处理器、与处理器通信连接 的存储介质,所述存储介质适于存储多条指令;所述处理器适于调用所述存储介质中的指 令,以执行实现所述的移动视频与地理场景的融合方法的步骤。 第四方面,本实施例公开了一种计算机可读存储介质,其中,所述计算机可读存储 介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以 实现所述的移动视频与地理场景的融合方法的步骤。 有益效果,本发明提供了一种移动视频与地理场景的融合方法、系统及电子设备, 根据无人机相机的位置信息确定场景融合区域的地形影像数据,从确定出的地形影像数据 中选取视频关键帧;根据ASIFT算法提取视频关键帧与地形影像的匹配点;根据所述匹配点 5 CN 111582022 A 说 明 书 3/8 页 坐标和透视变换公式计算出视频关键帧的角点对应在地形影像中的像素坐标,并将所述像 素坐标转换为经纬度坐标;根据视频关键帧的角点对应的经纬度坐标,利用内插法得到移 动视频融合到地形影像的三维场景模型。本发明以无人机视频和地理场景图像作为原始数 据,首先实现单帧视频与地理场景的融合,再实现所有视频帧与地理场景的融合,具有极高 的精度和实用性。 附图说明 图1是本发明实施例提供的移动视频与地理场景的融合方法的步骤流程图; 图2是本发明实施例中移动视频与地理场景的融合具体应用示意图; 图3是本发明实施例中求解匹配点过程中仿射参数的几何解释图; 图4是本发明实施例中求解所有视频帧角点坐标的参数解释图; 图5是本发明实施例中移动视频与地理场景的融合系统的原理结构框图。











