
技术摘要:
本发明提供一种转向控制系统,其抑制在线控转向方式的车辆的转向角转向到转向末端时反作用力转矩骤变的情况。转向控制系统具备使车轮转弯的转弯装置、对方向盘赋予反作用力转矩的反作用力产生装置以及控制装置。控制装置包括基于表示转弯角相对于转向角的大小关系的第 全部
背景技术:
在专利文献1中公开了与转向控制装置相关的技术,该转向控制装置执行抑制以 转向角(日文:操舵角)欲超过上限值的方式操作方向盘(日文:ステアリング)的处理。在该 技术中,在车轮的转弯角(日文:転舵角)或者方向盘的转向角之中的最大值的大小为限制 开始阈值以上的情况下,操作反作用力致动器,使用于限制转向角的大小进一步变大的限 制用反作用力急剧变大。 另外,在专利文献2中公开了与转向控制装置相关的技术,该转向控制装置能够调 整表示转向盘(日文:ステアリングホイール)的转向角与转弯轮的转弯角的关系的舵角比 (日文:舵角比)特性。在该技术中,作为舵角比特性,设定有行驶时舵角比特性和停车时舵 角特性至少这两个特性。 现有技术文献 专利文献 专利文献1:日本特开2018-047784号公报 专利文献2:日本特开2015-123864号公报
技术实现要素:
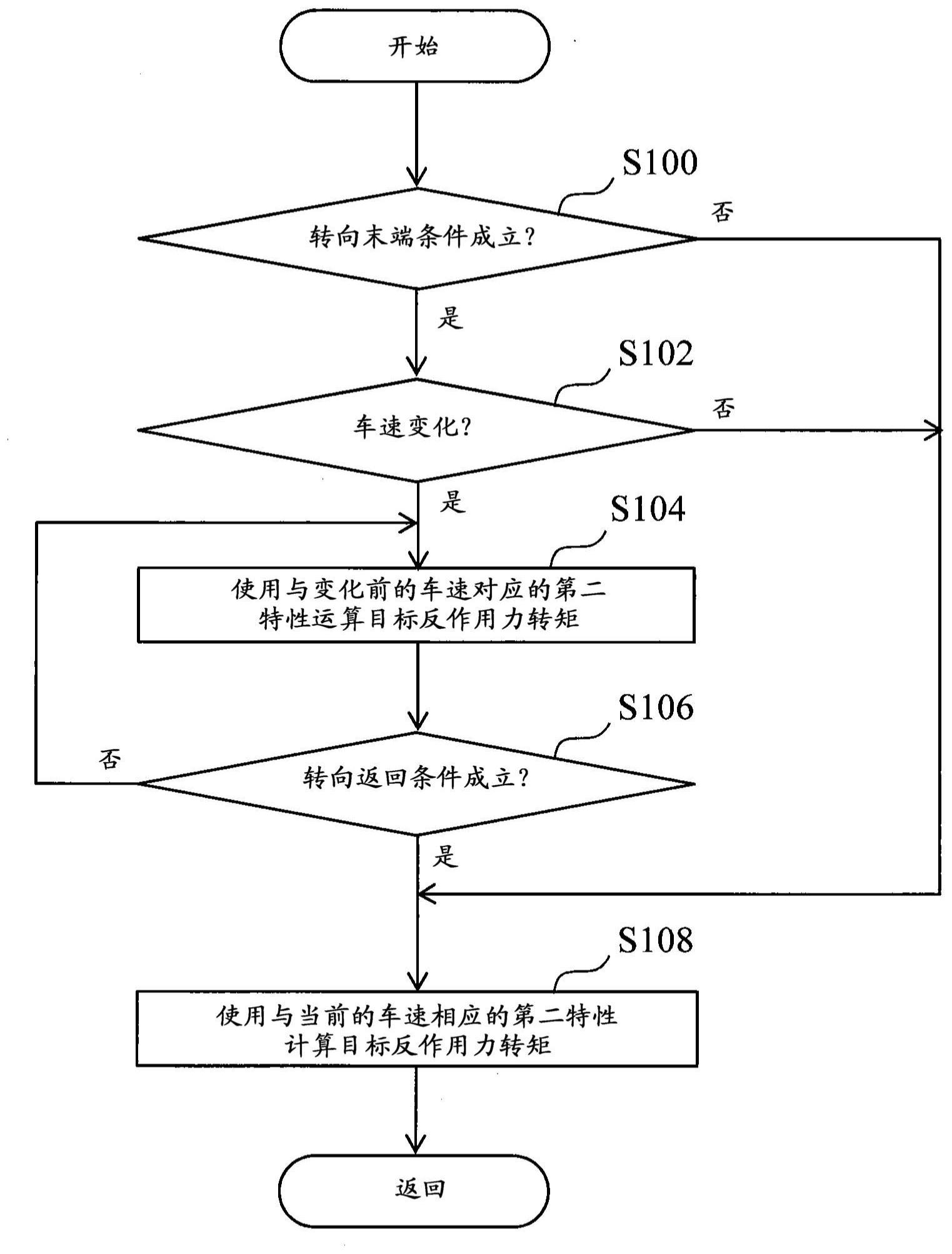
发明所要解决的课题 如专利文献2的技术那样,在根据车辆的状态变化来调整舵角比特性的结构中,能 够实现与车辆的状态相应的舵角比特性的最佳化。然而,当舵角比特性变化时,与转弯角为 最大的转弯末端对应的方向盘的转向角(转向末端)会变化。因此,若在如专利文献1的技术 那样在转向末端反作用力转矩急剧增大的结构中应用专利文献2的技术,则在转向到转向 末端的车辆的状态变化时,反作用力转矩骤变,驾驶员有可能对方向盘的转向感觉到不适 感。这样,在能够根据车辆的状态来调整舵角比特性的线控转向方式的车辆的转向控制中, 对于在转向末端车辆的状态变化时的反作用力转矩的控制存在课题。 本发明是鉴于上述那样的课题而完成的,其目的在于提供一种转向控制系统,其 能够抑制在线控转向方式的车辆的转向角被转向至转向末端时反作用力转矩骤变的情况。 用于解决课题的手段 为了解决上述课题,第一技术方案应用于线控转向方式的车辆的转向控制系统。 转向控制系统具备:转弯装置,所述转弯装置通过转弯电动机的工作使车辆的车轮转弯;反 作用力产生装置,所述反作用力产生装置通过反作用力电动机的工作对车辆的方向盘赋予 反作用力转矩;以及控制装置,所述控制装置基于车辆的状态,运算用于控制转弯装置的车 轮的转弯角以及用于控制反作用力产生装置的反作用力转矩。控制装置构成为包括:转弯 角运算部,所述转弯角运算部基于第一特性运算与转向角相应的转弯角;以及反作用力转 4 CN 111731375 A 说 明 书 2/9 页 矩运算部,所述反作用力转矩运算部基于第二特性运算与转向角相应的反作用力转矩。在 此,第一特性是表示转弯角相对于方向盘的转向角的大小关系的特性,第二特性是表示反 作用力转矩相对于转向角的大小关系的特性。能够根据车辆的状态来调整第一特性以及第 二特性。转弯角运算部构成为,对车辆的状态从第一状态变化为第二状态的情况进行响应, 使第一特性从与第一状态对应的特性向与第二状态对应的特性变化。并且,反作用力转矩 运算部构成为,在转向角被转向到与转弯角的上限对应的转向末端的情况下,在车辆的状 态从第一状态变化为第二状态时,将第二特性维持为与第一状态对应的特性。 第二技术方案为,在第一技术方案中,还具备以下特征。 反作用力转矩运算部构成为,当在转向末端处车辆的状态从第一状态变化为第二 状态之后,在第三状态下转向角返回至规定转向角时,使第二特性从与第一状态对应的特 性向与第三状态对应的特性变化。 为了解决上述的课题,第三技术方案应用于线控转向方式的车辆的转向控制系 统。转向控制系统具备:转弯装置,所述转弯装置通过转弯电动机的工作使车辆的车轮转 弯;反作用力产生装置,所述反作用力产生装置通过反作用力电动机的工作对车辆的方向 盘赋予反作用力转矩;以及控制装置,所述控制装置基于车辆的状态,运算用于控制转弯装 置的车轮的转弯角以及用于控制反作用力产生装置的反作用力转矩。控制装置构成为包 括:转弯角运算部,所述转弯角运算部基于第一特性运算与转向角相应的转弯角;以及反作 用力转矩运算部,所述反作用力转矩运算部基于第二特性运算与转向角相应的反作用力转 矩。在此,第一特性是表示转弯角相对于方向盘的转向角的大小关系的特性,第二特性是表 示反作用力转矩相对于转向角的大小关系的特性。能够根据车辆的状态来调整第一特性以 及第二特性。转弯角运算部构成为,对车辆的状态从第一状态变化为第二状态的情况进行 响应,使第一特性从与第一状态对应的特性向与第二状态对应的特性变化。并且,反作用力 转矩运算部构成为,在转向角被转向到与转弯角的上限对应的转向末端的情况下,在车辆 的状态从第一状态变化为第二状态时,通过比车辆的状态的变化速度缓慢的变化速度使第 二特性从与第一状态对应的特性向与第二状态对应的特性变化。 第四技术方案为,在第一至第三技术方案中的任一项技术方案中,还具备以下特 征。 车辆的状态是车速。第二状态的车速高于第一状态的车速。而且,转弯角运算部构 成为,当在转向末端处车辆的状态从第一状态变化为第二状态的情况下,使第一特性变化, 以使转弯角相对于转向角的大小变小。 第五技术方案为,在第一至第三技术方案中的任一项技术方案中,还具备以下特 征。 车辆的状态是车速。第二状态的车速低于第一状态的车速。而且,转弯角运算部构 成为,在转向末端处车辆的状态从第一状态变化为第二状态的情况下,使第一特性变化,以 使转弯角相对于转向角的大小变大。 发明效果 根据第一技术方案的转向控制系统,即使在转向末端处车辆的状态从第一状态向 第二状态变化而使第一特性发生了变化时,第二特性也维持为与第一状态对应的特性。由 此,即使在转向末端发生了变化的情况下也能够维持反作用力转矩,因此能够抑制方向盘 5 CN 111731375 A 说 明 书 3/9 页 的转向角骤变而消除驾驶员的不适感。 根据第二技术方案的转向控制系统,当在转向末端处车辆的状态从第一状态变化 为第二状态之后,在第三状态下转向角返回至规定转向角的情况下,第二特性从与第一状 态对应的特性向与第三状态对应的特性变化。第二特性为:转向角越小则与车辆的状态相 应的反作用力转矩的差越小。因此,根据本发明,能够一边抑制反作用力转矩的骤变,一边 使第二特性跟随与车辆的状态相应的特性。 根据第三技术方案的转向控制系统,即使在转向末端处车辆的状态从第一状态向 第二状态变化而使第一特性发生了变化的情况下,第二特性也通过比该状态的变化速度缓 慢的变化速度从与第一状态对应的特性向与第二状态对应的特性变化。由此,即使在车辆 的状态变化而使转向末端发生了变化的情况下,由于与之相伴的反作用力转矩的变动变得 缓慢,因此也能够使驾驶员无不适感地进行方向盘的增转(日文:切り込み)或收转(日文:切 り戻し)。 根据第四技术方案,当在转向末端处车辆加速的情况下,能够抑制方向盘的转向 角进一步增转。 根据第五技术方案,当在转向末端处车辆减速的情况下,能够抑制方向盘的转向 角突然收转。 附图说明 图1是概略地表示本实施方式的转向控制系统的结构例的框图。 图2是用于说明控制装置的功能的框图。 图3是表示控制装置所存储的第一特性的一例的图。 图4是表示控制装置所存储的第二特性的一例的图。 图5是用于说明反作用力转矩控制的课题的图。 图6是用于说明反作用力转矩调整处理的图。 图7是表示反作用力转矩调整处理中的车速以及转向角的变化的时序图。 图8是表示实施方式1的转向控制系统的处理的概要的流程图。 图9是用于说明实施方式2的反作用力转矩调整处理的图。 图10是表示实施方式2的反作用力转矩调整处理中的车速以及转向角的变化的时 序图。 图11是表示实施方式2的转向控制系统的处理的概要的流程图。 附图标记说明 1 转向控制系统; 10 转向盘; 20 转向轴; 30 反作用力产生装置; 31 反作用力电动机; 40 转弯装置; 41 转弯电动机; 42 减速器; 6 CN 111731375 A 说 明 书 4/9 页 43 转弯轴; 51 转向角传感器; 52 转向转矩传感器; 53 车速传感器; 100 控制装置(ECU); 102 处理器; 104 存储器; 106 输入输出接口; 110 转弯角运算部; 120 转弯角控制部; 130 反作用力转矩运算部; 140 反作用力转矩控制部。











