
技术摘要:
本发明公开了一种平菇智能养殖管理装置,包括基座,设于基座上的M块呈一字形间隔排列的竖板,设于相邻竖板之间的N块由下至上依次间隔排列的水平支撑板,设于每块水平支撑板上的用于放置平菇菌棒的水平滑动板;水平滑动板两侧均设有条形板,两块条形板分别插入设于两块 全部
背景技术:
为了保证上市的平菇的新鲜度,通常晚上采摘平菇,早上售卖;平菇菌棒通常是整 齐的叠放在一起,采摘一个菌棒上的平菇过程中,会碰到相邻的菌棒上的平菇,会导致平菇 受到损伤,如果将每个需要采摘的平菇菌棒拿出来后再采摘平菇,工作量大,采摘效率低。
技术实现要素:
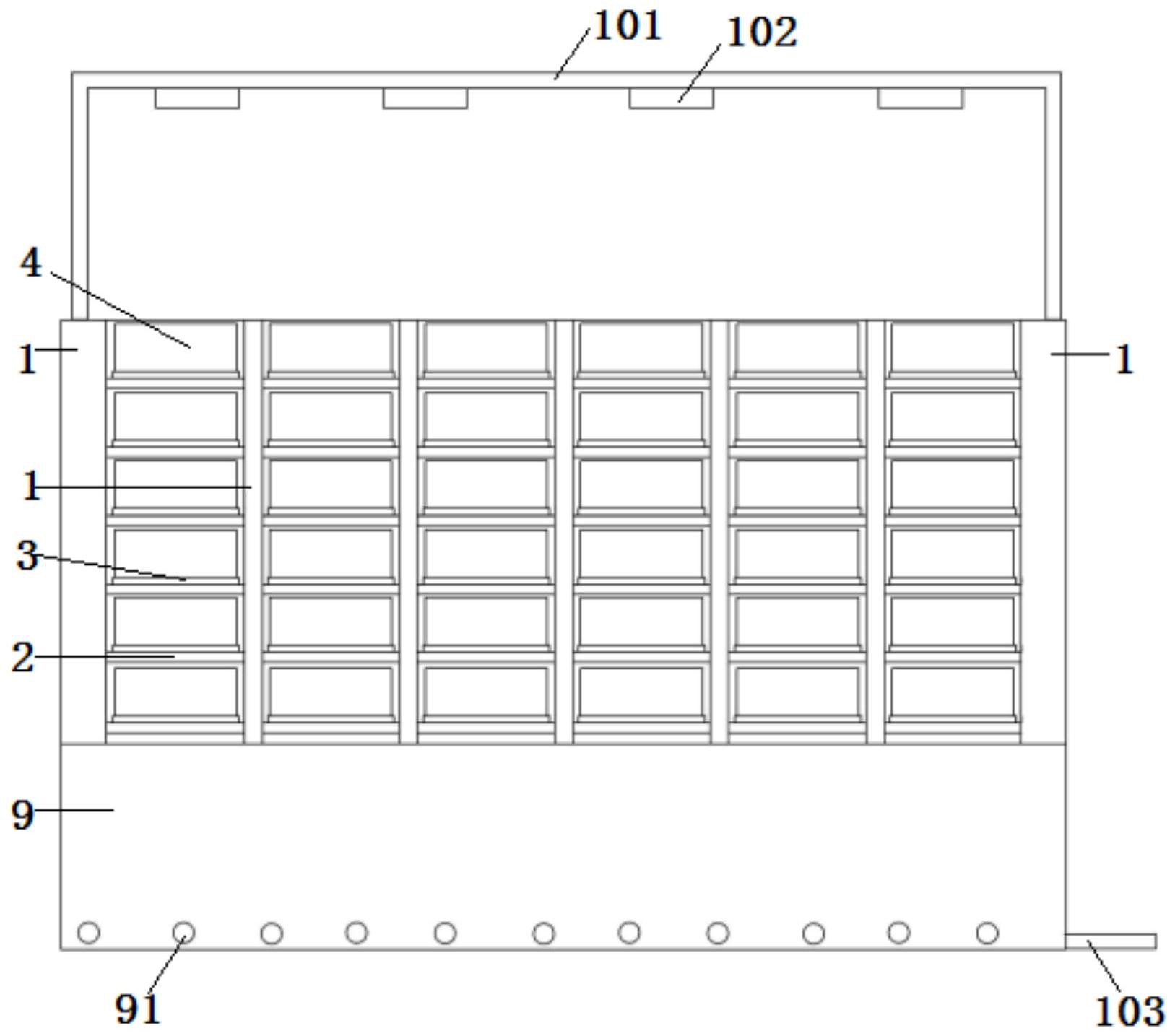
本发明的发明目的是为了克服现有技术中的平菇采摘效率低,劳动强度大的不 足,提供了一种可有效降低劳动强度,提高工作效率的平菇智能养殖管理装置。 为了实现上述目的,本发明采用以下技术方案: 一种平菇智能养殖管理装置,包括基座,设于基座上的M块呈一字形间隔排列的竖板, 设于相邻竖板之间的N块由下至上依次间隔排列的水平支撑板,设于每块水平支撑板上的 用于放置平菇菌棒的水平滑动板,M大于2,N大于2;水平滑动板两侧均设有条形板,两块条 形板分别插入设于两块竖板的侧面上的滑槽中;最左部的竖板之外的M-1块竖板中均设有N 个纵向腔体,所述纵向腔体中部设有移动板,移动板将纵向腔体分隔成前腔体和后腔体,前 腔体和后腔体中均设有可纵向伸缩的条形气囊,所述条形气囊上套设有弹簧,所述水平滑 动板右侧的条形板与移动板固定连接,纵向腔体左侧设有纵向开口,所述条形气囊通过充 气管与充气泵连接,所述条形气囊通过排气管与真空泵连接,充气管上设有充气电磁阀,排 气管上设有排气电磁阀;平菇菌棒两端分别露出水平滑动板前端和后端之外;还包括采摘 车,设于采摘车上的摄像头,照明灯,切割机构,传送机构和收集箱;充气泵、真空泵、充气电 磁阀、排气电磁阀、摄像头、照明灯、切割机构和传送机构均与控制器电连接;最左部的竖板 和最右部的竖板上端设有U形水管,基座下方的地面上设有蓄水槽,基座下端与蓄水槽上端 连接,基座上设有若干个导流孔,各个导流孔均与蓄水槽连通;U形水管上设有若干个用于 向斜下方喷水的喷头,伸入蓄水槽中的排水管上设有水泵,水泵与控制器电连接。 工作人员推动采摘车,使采摘车靠近各块竖板,控制器控制照明灯点亮,照射各个 平菇菌棒,摄像头拍摄各个平菇菌棒上的平菇,与控制器连接的存储器中存储有与不同的 平菇图像对应的平菇尺寸,还存储有可以采摘平菇的标准尺寸,控制器将得到的平菇图像 所对应的尺寸与标准尺寸做比较,当平菇图像所对应的尺寸≥标准尺寸,控制器做出平菇 可以采摘的判断; 控制器控制充气泵和真空泵工作,对于可以采摘的平菇,控制器控制与可以采摘的平 菇的平菇菌棒下的水平滑动板连接的纵向腔体的靠近采摘车的条形气囊的充气电磁阀关 闭、排气电磁阀打开放气,远离采摘车的条形气囊的充气电磁阀打开、排气电磁阀关闭充 气,使移动板向靠近采摘车的方向移动; 3 CN 111602558 A 说 明 书 2/5 页 按照采摘车前进的方向,使靠近采摘车的每列可以采摘平菇的平菇菌棒下的水平滑动 板依次向外移出,如果是一列有多个可以采摘平菇的平菇菌棒,则从下至上依次将各个可 以采摘平菇的平菇菌棒下的水平滑动板向外移出;每个水平滑动板带动平菇菌棒向外移出 的距离是相同的,采摘平菇结束之后,控制器使两个条形气囊均处于放完气的收缩状态,两 个弹簧的弹力使水平滑动板带动平菇菌棒恢复原状态; 当有一个可以采摘平菇的平菇菌棒下的水平滑动板向外移出之后,工作人员推动采摘 车,使采摘车带动切割机构对准平菇,将平菇切割下来,将切割下来的平菇放置到传送机构 上,工作人员将传送机构上的平菇放置到收集箱。 每隔一段时间,打开水管的进水阀门,水从各个喷头喷出,水不会直接落到平菇菌 棒上,水落到平菇菌棒两端的空间中,水增加空气的湿度,促进平菇的生长; 落到地面上的水通过各个导流孔进入蓄水槽,当蓄水槽中的水较多时,工作人员通过 控制器控制水泵工作,将水排出。 作为优选,所述采摘车包括基板,设于基板上的前轮和2个后轮,设于前轮上的动 力电机;地面上设有3条导轨,前轮和2个后轮分别与3条导轨滚动连接; 切割机构包括设于基板上的升降气缸和倒L形支撑柱,设于升降气缸上的转动电机,与 转动电机的转轴连接的托举篮;倒L形支撑柱上设有切割气缸,切割气缸上设有升降切刀, 倒L形支撑柱上设有红外线接收器,红外线发射器、红外线接收器、动力电机、升降气缸、转 动电机和切割气缸均与控制器电连接。 工作人员通过控制器控制动力电机带动采摘车向前移动,当控制器根据摄像头拍 摄的图像,做出有一个可以采摘平菇的平菇菌棒下的水平滑动板向外移出之后,控制器控 制采摘车带动切割机构向前移动,控制升降气缸的伸缩杆缩回; 红外线发射器发射红外线,红外线接收器接收红外线,当红外线接收器接收不到红外 线,说明红外线发射器发射的红外线被平菇遮挡住,控制器做出托举篮已经对准平菇的判 断; 根据摄像头拍摄的图像,控制器控制升降气缸带动托举篮向上移动,使托举篮靠近平 菇下周面后,升降气缸停止工作; 切割气缸带动升降切刀对准平菇根部向下移动,将平菇切割下来,平菇落入托举篮中, 转动电机带动托举篮向右旋转,平菇落到传送机构上,工作人员将传送机构上的平菇放置 到收集箱。 作为优选,所述托举篮包括向下拱起的半圆弧形的第一限位圈,向左拱起的半圆 弧形的第二限位圈,第一限位圈和第二限位圈之间设有若干条弧形连接条,第一限位圈、第 二限位圈和各条弧形连接条上均设有缓冲套。 托举篮的形状与一株平菇的形状相似,可以在不损坏平菇叶片的同时,将平菇托 住。 作为优选,所述倒L形支撑柱上还设有下压气缸,下压气缸的伸缩杆与压板连接, 下压气缸与控制器电连接。 下压气缸用于将移动出来的水平滑动板上的平菇菌棒压住,便于升降切刀更好的 切割平菇。 作为优选,转动电机的壳体上设有L形支撑杆,倒L形支撑柱上设有可穿过L形支撑 4 CN 111602558 A 说 明 书 3/5 页 杆的竖向开口槽,L形支撑杆上设有横向气缸,横向气缸的伸缩杆与旋转电机连接,旋转电 机与旋转切刀连接,横向气缸和旋转电机均与控制器电连接。 平菇切割之后,需要将平菇菌棒上的残留根部清除掉,否则,容易在残留根部长出 残次平菇,转动电机带动托举篮向右旋转后,横向气缸带动旋转电机及旋转切刀向右移动, 使旋转切刀与平菇菌棒上的残留根部接触,旋转电机带动旋转切刀旋转,将残留根部清除 掉; 然后,旋转电机停止工作,横向气缸带动旋转电机及旋转切刀向左缩回。 作为优选,传送机构包括两个支撑架,设于一个支撑架上的主动滚轴,设于另一个 支撑架上的从动滚轴,与主动滚轴连接的传送电机,设于主动滚轴和从动滚轴上的传送带; 传送带左端位于切割机构右下方,传送带右端位于收集箱左上方,传送电机与控制器电连 接。 当工作人员较忙的时候,传送电机带动传送带自动将平菇送入收集箱中,为了减 少平菇放入收集箱中时造成的损伤,通常由在基板上的工作人员将平菇放入收集箱中。 作为优选,所述水管的侧视图呈向上开口的V形;水平支撑板和所述水平滑动板均 为栅板结构。 各个喷头分别位于V形水管的左上部和右上部,使喷头落下来的水位于各个平菇 菌棒的前方和后方,栅板结构的水平支撑板和所述水平滑动板,使空气流动性好,湿气不容 易在平菇菌棒附近聚集。 因此,本发明具有如下有益效果:可以自动将需要采摘平菇的平菇菌棒移动出来, 避免切割平菇时,对相邻平菇菌棒上的平菇造成损伤;采摘效果好,有效降低了劳动强度, 提高了管理效率。 附图说明 图1是本发明的竖板、水平支撑板、平菇菌棒和水平滑动板的一种结构示意图; 图2是本发明的水平滑动板、条形板和纵向腔体的一种结构示意图; 图3是本发明的采摘车和切割机构的一种结构示意图; 图4是本发明的切割机构、L形支撑杆、横向气缸、旋转电机和旋转切刀的一种结构示意 图; 图5是本发明的传送机构和收集箱的一种结构示意图; 图6是本发明的托举篮的一种结构示意图; 图7是本发明的水管的一种侧视图。











