
技术摘要:
本发明公开了一种横向控制模式切换的方法、装置、系统和汽车。其中,该方法包括:在进入自动驾驶的情况下,根据检测到的车速和是否出现紧急避障确定控制模式;在确定控制模式的情况下,根据监测到的车速和是否出现紧急避障进行控制模式的切换。本发明解决了由于现有技 全部
背景技术:
目前商用车自动驾驶横向控制基本上采用两种主流控制方式:转向角度控制(也 称位置控制)与直接扭矩控制(简称扭矩控制)。在实际开发过程中,这两种方式都需要较长 的标定时间、或采用比较复杂的算法,来保证当前开发阶段基本的横向控制需求。而商用车 自动驾驶的运行场景复杂性和工况变化大,同时与乘用车相比,商用车存在前轴负荷较大、 横向控制执行负载较大的差异,从而智能转向的复杂性也较高,使用单一控制方式,即,转 向角度控制或直接扭矩控制不能满足各个场景下的自动驾驶需求。 当前自动驾驶的横向控制大部分采用转向角度控制,在低车速测试时其响应基本 可以满足横向控制精度需求。但在中高速或车辆载重变大时,出现明显的响应不足,尤其是 在商用车的横向控制中。主要表现为直角转弯时由于响应速度不够,在完成转变后未能及 时回正,从而车辆转得过多,从表面上表现为明显的“过度转向”,然后还需要进行一次回正 修正来保证此后的直行;另一方面,在高速行驶时,需要保持车辆的行进规划路线而频繁进 行小角度调整,这时又显得过于灵敏,从而出现整车左右摆动的情况,影响到行车安全。而 对于直接扭矩控制,在低转向速度下会出现扭矩脉动(固有特性),也会影响到横向控制效 果。 针对上述由于现有技术中在横向控制的过程中对汽车整体控制效果差的问题,目 前尚未提出有效的解决方案。
技术实现要素:
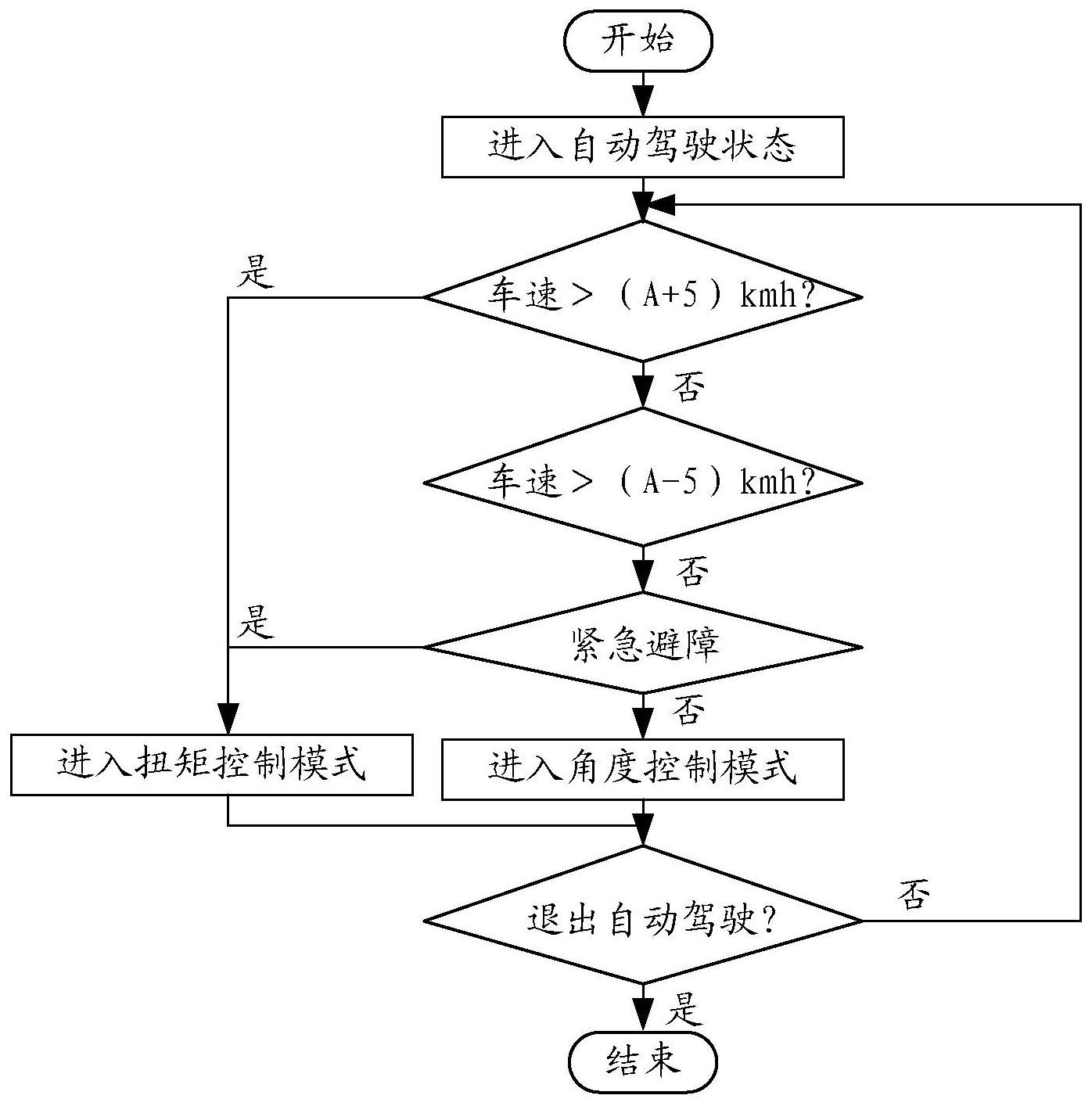
本发明实施例提供了一种横向控制模式切换的方法、装置、系统和汽车,以至少解 决由于现有技术中在横向控制的过程中对汽车整体控制效果差的技术问题。 根据本发明实施例的一个方面,提供了一种横向控制模式切换的方法,包括:在进 入自动驾驶的情况下,根据检测到的车速和是否出现紧急避障确定控制模式;在确定控制 模式的情况下,根据监测到的车速和是否出现紧急避障进行控制模式的切换。 可选的,根据检测到的车速和是否出现紧急避障确定控制模式包括:在控制模式 包括角度控制模式和直接扭矩控制模式的情况下,若检测到的车速小于第一预设车速,且 整车未处于紧急避障,则确定控制模式为角度控制模式;若检测到的车速大于第一预设车 速,则确定控制模式为直接扭矩控制模式;若检测的车速小于第一预设车速,且整车处于紧 急避障,则确定控制模式为直接扭矩控制模式。 可选的,根据监测到的车速和是否出现紧急避障进行控制模式的切换包括:在控 制模式处于直接扭矩控制模式的情况下,若检测到车速小于第二预设车速,且整车未处于 紧急避障,则将控制模式由直接扭矩控制模式切换至角度控制模式。 4 CN 111547050 A 说 明 书 2/6 页 进一步地,可选的,该方法还包括:在整车的紧急避障模式解除的情况下,若检测 到车速小于第二预设车速,则将控制模式确定为角度控制模式。 可选的,该方法还包括:在接收到退出自动驾驶的指令,或检测到故障的情况下, 退出自动驾驶模式 可选的,该方法还包括:当整车决策控制单元异常,且无法及时下发模式切换时, 通过转向控制器依据检测到的车速进行紧急切换,并报警和退出自动驾驶。 根据本发明实施例的另一方面,还提供了一种横向控制模式切换的装置,包括:确 定模块,用于在进入自动驾驶的情况下,根据检测到的车速和是否出现紧急避障确定控制 模式;切换模块,用于在确定控制模式的情况下,根据监测到的车速和是否出现紧急避障进 行控制模式的切换。 可选的,确定模块包括:第一确定单元,用于在控制模式包括角度控制模式和直接 扭矩控制模式的情况下,若检测到的车速小于第一预设车速,且整车未处于紧急避障,则确 定控制模式为角度控制模式;第二确定单元,用于若检测到的车速大于第一预设车速,则确 定控制模式为直接扭矩控制模式;第三确定单元,用于若检测的车速小于第一预设车速,且 整车处于紧急避障,则确定控制模式为直接扭矩控制模式。 根据本发明实施例的又一方面,还提供了一种横向控制模式切换的系统,包括:整 车决策控制单元和转向控制器,其中,整车决策控制单元在进入自动驾驶的情况下,根据检 测到的车速和是否出现紧急避障确定控制模式,并将确定的控制模式发送至转向控制器, 由转向控制器根据预设条件进行调节;在整车决策控制单元确定控制模式的情况下,通过 整车决策控制单元根据监测到的车速和是否出现紧急避障进行控制模式的切换,由转向控 制器根据预设条件切换当前控制模式,其中,预设条件包括:方向盘转角、方向盘转速和扭 矩。 根据本发明实施例的再一方面,还提供了一种汽车,包括:横向控制模式切换的系 统,其中,横向控制模式切换的系统包括上述系统。 在本发明实施例中,采用角度控制模式和直接扭矩控制模式互相切换的方式,通 过在进入自动驾驶的情况下,根据检测到的车速和是否出现紧急避障确定控制模式;在确 定控制模式的情况下,根据监测到的车速和是否出现紧急避障进行控制模式的切换,达到 了角度控制模式和直接扭矩控制模式之间无缝转换的目的,从而实现了提升横向控制对汽 车整体控制的技术效果,进而解决了由于现有技术中在横向控制的过程中对汽车整体控制 效果差的技术问题。 附图说明 此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发 明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1是根据本发明实施例的横向控制模式切换的方法的流程示意图; 图2是根据本发明实施例的一种横向控制模式切换的方法的流程示意图; 图3是根据本发明实施例的一种横向控制模式切换的方法中模式切换的流程示意 图; 图4是根据本发明实施例的横向控制模式切换的装置的结构示意图; 5 CN 111547050 A 说 明 书 3/6 页 图5是根据本发明实施例的横向控制模式切换的系统的结构示意图; 图6a是根据本发明实施例的横向控制模式切换的系统中角度控制模式的结构示 意图; 图6b是根据本发明实施例的横向控制模式切换的系统中直接扭矩控制模式的结 构示意图。











