
技术摘要:
本发明涉及评价装置,进行与驾驶员的感觉相符的风险评价。评价装置对在车辆所行驶的道路的周边存在的风险进行评价。评价装置具备:第一判定机构,基于表示车辆的驾驶员的驾驶行动的特征量来对表示上述道路的一个区间内的风险的有无以及所存在的风险的程度的第一风险值 全部
背景技术:
作为这种装置,公知有一种基于周边信息(换言之,环境信息)来评 价车辆所行驶 的区间的风险的装置。例如在专利文献1中,公开了一种使 用表示地理区域内的地形的地 图信息来评价当前或将来的事故发生风险 的装置。 专利文献1:日本特开2018-032343号公报 如上述的专利文献1所记载的技术那样,某个地点处的风险取决于周 边信息,但 难以仅通过周边信息就准确地评价风险。另外,还存在评价所 利用的周边信息本身不完整 的情况(例如旧的地图信息等)。这样,在无 法准确地评价风险的情况下,存在风险的评价 结果与车辆的驾驶员的感觉 不符的可能性。具体而言,会产生即便是驾驶员感到风险那样 的位置也被 评价为无风险,或相反即便是驾驶员完全感受不到风险那样的位置也被评 价 为有风险这一技术问题点。
技术实现要素:
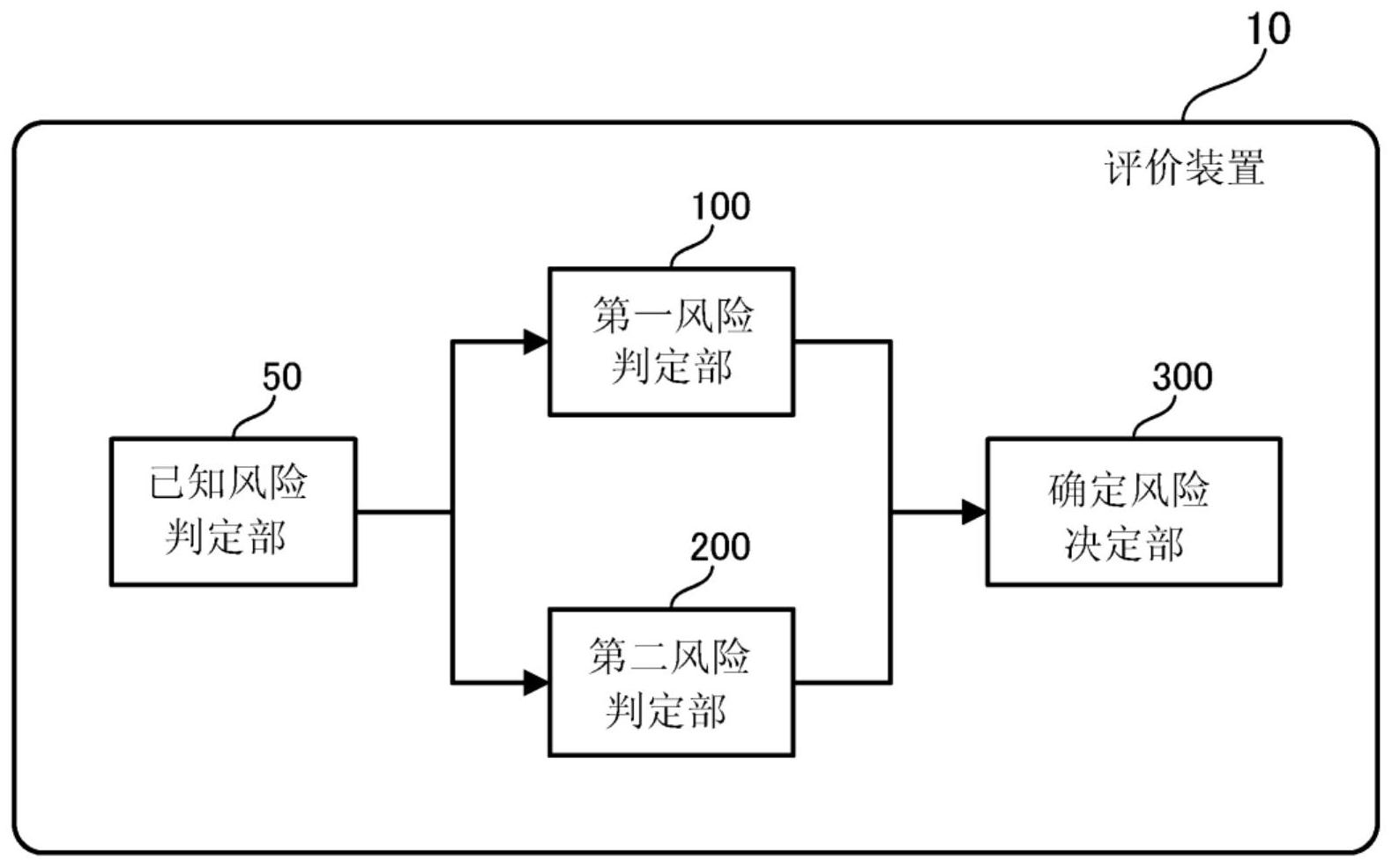
本发明例如是鉴于上述问题点而完后的,其课题在于,提供一种能够 进行符合驾 驶员的感觉的风险评价的评价装置。 在本发明所涉及的评价装置的一个方式中,评价装置对在车辆所行驶 的道路的 周边存在的风险进行评价,具备:第一判定机构,基于表示上述 车辆的驾驶员的驾驶行动 的特征量来对表示上述道路的一个区间内的风 险的有无以及所存在的风险的程度的第一 风险值进行判定;第二判定机 构,基于上述道路的周边信息来对表示上述一个区间内的风 险的有无以及 所存在的风险的程度的第二风险值进行判定;以及输出机构,(i)在由上 述 第一判定机构判定为有风险的情况下,无论上述第二判定机构的判定结 果如何,均将上述 第一风险值作为表示上述一个区间的风险的确定风险值 输出,(ii)在由上述第一判定机 构判定为无风险且由上述第二判定机构判 定为有风险的情况下,将上述第二风险值作为 上述确定风险值输出。 附图说明 图1是表示实施方式所涉及的评价装置的结构的框图。 图2是表示第一风险判定部的结构的框图。 图3是表示从行驶数据提取的特征量的一个例子的图表。 图4是表示特征量的聚类(Clustering)的一个例子的表。 图5是表示根据各集群(Cluster)的特征量的平均值来决定集群等级 的方法的 表。 图6是表示决定地点驾驶员类型的方法的一个例子的表。 3 CN 111739340 A 说 明 书 2/9 页 图7是表示根据地点驾驶员类型决定驾驶员类型的方法的一个例子 的表。 图8是表示加速器开度为0的区间的图表。 图9是表示基于加速器断开期间比例来计算第一风险值的方法的一 个例子的图 表。 图10是表示实施方式所涉及的评价装置的动作的流程的流程图。 图11是表示在实施方式所涉及的评价装置中判定的第一风险值及第 二风险值、 以及所决定的确定风险值的一个例子的表。 附图标记说明: 10…评价装置;50…已知风险判定部;100…第一风险判定部;110… 行驶数据取 得部;120…特征量提取部;130…聚类部;140…驾驶员类型 决定部;150…分类数据存储 部;160…风险值计算部;200…第二风险判 定部;300…确定风险决定部。











