
技术摘要:
本发明公开了一种基于GRU的步态识别方法,属于假肢技术领域,本发明解决了传统步态分类方法计算复杂、实时性差等问题,通过GRU省却了繁复的特征提取工程,只需使用模型参数进行分类即可,大大提升了计算速度,且实现了步态阶段的实时计算,摆脱了传统步态识别需要在线 全部
背景技术:
一个完整的周期步态称作“步态周期”。一个步态周期被分成了两个阶段,分别是 “支撑期”和“摆动期”,并且可进一步分为多个子阶段。步态识别不仅可以为康复医师提供 重要的分析依据,还能够为智能假肢提供控制信号,使之做出相应的控制策略与参数的调 整,从而使患者的运动过程更加稳定,流畅,自然。 目前的步态识别方法大多存在计算复杂、实时性差、可靠性低等缺点。如 201811241695.7号的中国发明专利申请即是通过采集肌电信号并提取相关特征识别步态 阶段,然而检测信号受体表温度与汗液等因素影响,稳定性和准确率低,需要经过小波分 解、计算威利森幅度等复杂的特征提取过程,过程繁琐实时性差,且电极需要与皮肤直接接 触,舒适性不佳。201910976122.7号的中国发明专利申请采用IMU模块采集人体左、右大腿 和小腿的旋转角度,并采用基于规则的分类算法实现对人体行走步态的实时识别,然而步 态阶段过渡期短、信号变化复杂,不同路况、不同检测对象存在较大差异性,采用基于规则 的分类算法尽管计算简便但其分类的准确性存疑,可靠性较低。
技术实现要素:
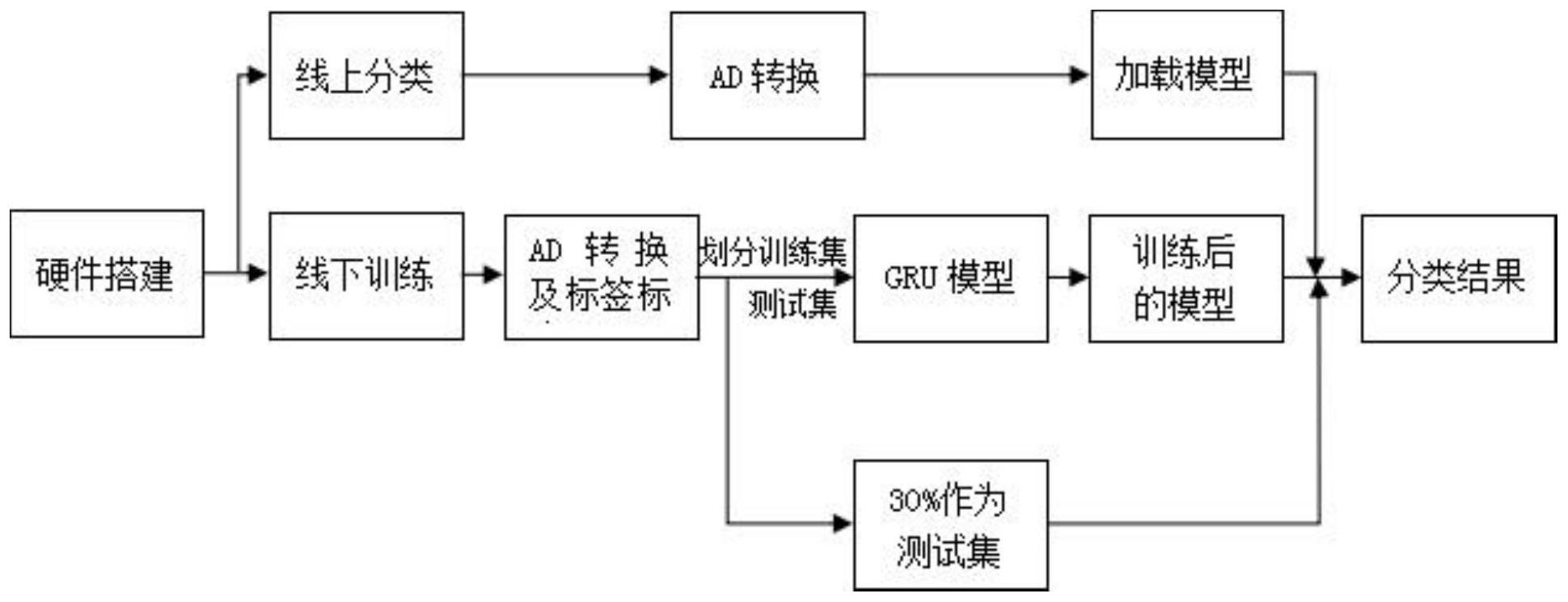
本发明要解决的问题是提供一种实时性高、计算复杂度低、准确度高的基于GRU的 步态识别方法。 为解决上述技术问题,本发明采用的技术方案是:一种基于GRU的步态识别方法, 针对下肢动力型假肢所需的控制信号对步行的五个阶段(摆动期、脚跟着地期、全足着地 期、前脚掌着地期和脚尖离地期)进行分类,所提供的步态识别方法是基于深度循环神经网 络技术的,对采集到的原始信号进行预处理后直接分类,包括如下步骤: 步骤一,利用穿戴于假肢足底的八单元高动态FSR薄膜压力传感器鞋垫采集行走 时的足底压力信息,将采集到的数据标注时间戳并通过无线通讯模块传送至树莓派或服务 器; 步骤二,在线下根据目标典型行走步频和时间戳,结合足底压力信号进行数据分 析处理,由五种步态阶段将各数据队列打上相应标签,形成数据标签对集; 步骤三,搭建门控循环单元(GRU)网络模型,该网络模型为四层结构,分别为两层 GRU、全连接层、softmax输出层;其中,输入数据作为第一层GRU单元的输入,第一层GRU单元 的输出作为第二层GRU单元的输入,第二层GRU单元的输出连接全连接隐藏层,全连接隐藏 层连接至softmax输出层;定义GRU单元、全连接层及各激励函数; 步骤四,将步骤二中得到的数据标签对集分成训练集与测试集,其中训练集送入 3 CN 111611859 A 说 明 书 2/5 页 步骤三中搭建的GRU网络模型进行训练,训练完成后利用测试集评估模型分类效果; 步骤五,在步骤四中训练评估得到的较佳模型中进行线上实时分类。 本发明步骤一中,所述FSR薄膜压力传感器安置在假肢脚下方与脚掌贴合。 本发明步骤二中,所述标签共对应五种典型步态阶段,分别为:摆动期、脚跟着地 期、全足着地期、前脚掌着地期和脚尖离地期,优选地,所述标签形式为独热编码。 优选地,本发明步骤二中,标签标定工作共分三步,包括(1)初步划分:由假肢穿戴 者正常行走若干步,统计各步态阶段持续时间和步频,按照时间戳起始时间、终止时间和步 频区分每一步,按照各步态持续时间比例和时间戳初步划分各步态阶段的数据队列;(2)各 阶段典型特征分析:由假肢穿戴者做出各步态阶段的姿势并维持若干秒,分析各步态阶段 的数据特点;(3)最终划分:综合考虑初步划分的步态阶段和各步态阶段的典型数据特点: 由根据各步态阶段持续时间和步频初步划分的五种步态阶段,每种步态阶段的数据队列舍 弃队列前的25%和队列后的25%,取其中部的50%,并且符合上述各步态阶段典型特点的 数据组成训练集和测试集。 本发明步骤三中,所述输入数据为八通道足底压力信号经过AD转换后的八维度特 征向量,每一维数据作为一个GRU节点的输入,整个序列长度为8个节点。 本发明使用STM32完成数据采集,树莓派和服务器配合实现识别算法:线下训练时 由步骤一采集数据,步骤二至步骤四在服务器上进行模型训练;线上部署时,由步骤一采集 数据,步骤五中在树莓派上加载步骤四中训练评估得到的较佳模型进行实时分类。 所述输出层结点数定义为当前模型中步态种类数,也即五种步态阶段。 优选地,GRU网络模型的权重优化方法为Adam优化算法。 优选地,全连接隐藏层激励函数为ReLU函数、Sigmod函数或tanh函数,输出层激励 函数为Softmax函数。 与现有技术相比,本发明的有益效果在于: 构建了深度循环神经网络,利用GRU单元从全脚掌整体上自动寻找不同步态阶段 下足底压力数据时间与空间上的特征,从而完成对五种步态阶段的直接分类。原始数据仅 需进行简单的AD转换送入神经网络即可,从而省却了繁复的特征提取工程,与此同时在多 分类任务较佳实施例中准确率可达到96.32%,提高了分类准确度与判别效率。 针对传统步态分类方法计算复杂、实时性差等缺点,本方法在服务器上进行模型 的训练工作,具体应用时只需由树莓派加载模型参数进行一系列前向运算即可,所占存储 空间不足2M,从加载模型到给出分类结果仅需0.0028s,大大提升了分类效率,且实现了步 态阶段的实时计算,摆脱了传统步态识别需要在线下进行分类繁琐过程,具有较高的实际 应用价值。 附图说明 下面通过参考附图并结合实例具体地描述本发明,本发明的优点和实现方式将会 更加明显,其中附图所示内容仅用于对本发明的解释说明,而不构成对本发明的任何意义 上的限制,在附图中: 图1是本发明的基于GRU的步态识别方法流程图; 图2是FSR薄膜压力传感器的力敏电阻分布图; 4 CN 111611859 A 说 明 书 3/5 页 图3是本发明的足底压力采集装置的原理图; 图4是本发明实施例中正常步态下原始信号示例(截取100条); 图5是GRU原理结构图; 图6是本发明搭建的GRU网络模型的结构图; 图7是示例样本在网络模型中的识别过程示意图; 图8是本发明的步态识别效果图 图9是实施例测试集中的混淆矩阵











