
技术摘要:
一种电动汽车控制仿真测试平台,包括电机模型、控制器和电池模型,控制器包括控制算法模块、信号生成模块和逆变器模型,控制算法模块用于采集电机模型的转子位置、母线电压和相电流信号,并据此计算电机模型的三相占空比,信号生成模块根据三相占空比计算出对应的控制 全部
背景技术:
随着混合动力汽车和纯电动汽车的不断发展、传统能源的逐渐消耗以及环境的恶 化,新能源汽车已经逐渐走进人们的生活,成为重要的交通工具之一,在人们的工作和生活 中扮演着越来越重要的角色。新能源汽车的安全性和可靠性就必须得到可靠的保障。 电机使新能源汽车的核心部件,其工作的可靠性、稳定性直接影响驾驶员的驾驶 感受。随着人们对电机控制器性能的要求不断提高,电机控制需要不断改进算法来满足需 求。传统的台架验证必不可少,但也存在中间变量观测不便、观测数据采样速率低、成本高 等问题。
技术实现要素:
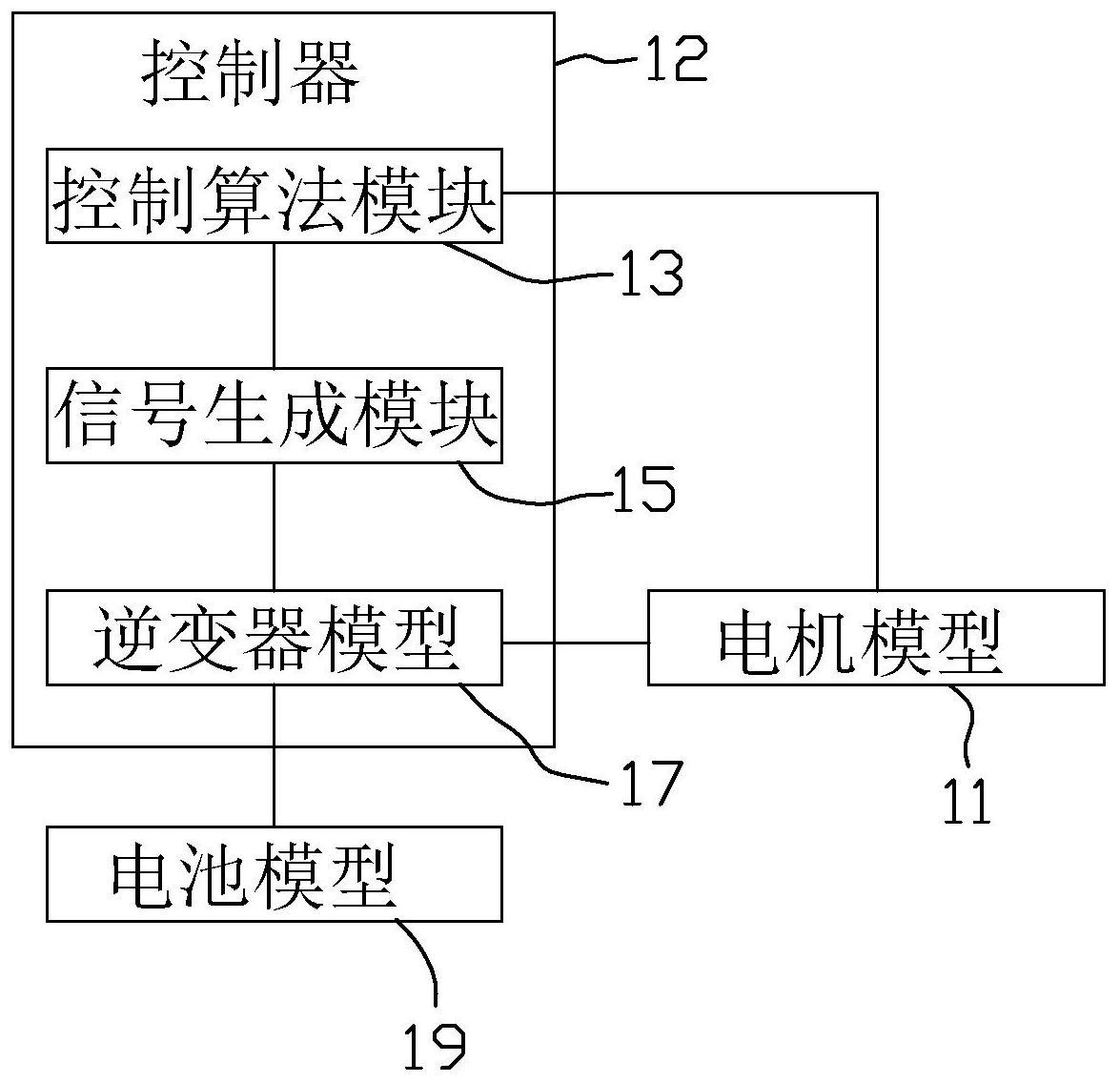
本发明的目的是提供一种与实际模型较为符合、仿真效果较好的电动汽车控制仿 真测试平台。 本发明提供一种电动汽车控制仿真测试平台,包括电机模型、控制器和电池模型, 所述控制器包括控制算法模块、信号生成模块和逆变器模型,所述电机模型、所述控制算法 模块、所述信号生成模块和所述逆变器模型依次首尾相接,所述电池模型连接于所述逆变 器模型,所述控制算法模块用于采集所述电机模型的转子位置、母线电压和相电流信号,并 据此计算所述电机模型的三相占空比,所述信号生成模块接收所述控制算法模块输出的三 相占空比计算出对应的控制信号,并输出给所述逆变器模型,所述逆变器模型接收所述电 池模型的输出电压,并根据所述控制信号将所述电池模型的所述输出电压进行调节后得到 调整电压输出给所述电机模型,所述计算电机模型用于根据输入的所述调整电压,计算出 所述电机模型的相电流和输出扭矩,并根据所述输出扭矩计算转子的当前转速和转子位 置。 在其中一实施例中,所述电机模型的电磁模型为: 其中,Ld、Lq分别为所述电机模型的d轴电感和q轴电感,R为电机定子电阻,id、iq分 别为定子d轴电流和q轴电流,Vd、Vq分别为d轴电压和q轴电压,ωm为所述电机模型的机械角 速度,ωe为所述电机模型的电角速度,λpm为永磁磁链,P为电机极对数,Te为电磁扭矩。在其 中一实施例中,所述电机模型的机械模型为: 4 CN 111552264 A 说 明 书 2/4 页 其中,J为电机模型的转动惯量,F为转动摩擦力系数,θm为机械角度,Tf为轴端静摩 擦力,Te为电磁转矩,ωm1为机械角速度。 在其中一实施例中,所述控制器的底层包括死区时间,所述信号生成模块生成的 控制信号包括死区时间。 在其中一实施例中,所述控制器中设有延时模块,用于对数据采样、数据计算和执 行进行延时。 在其中一实施例中,所述逆变器模型具体为: 其中,v为射极电压,Vf为前馈电压,G为门极电压,Vth为门限电压,i为射极电流, Ron为导通电阻,Goff为关断电。 在其中一实施例中,所述逆变器模型包括死区时间设置模块和窄脉冲抑制模块, 用于对输入的信息进行死区时间设置和窄脉冲抑制。 在其中一实施例中,所述电池模型输出恒定电压,且其输出电压可实时调节。 在其中一实施例中,所述控制信号为脉冲宽度调制信号。 本发明提供的电动汽车控制仿真测试平台,通过电机模型参数随电流变化,使电 动汽车控制仿真测试平台与实际的电机控制模型较为符合,仿真效果较好。 附图说明 图1为本发明一实施例的电动汽车控制仿真测试平台的结构框图。











