
技术摘要:
本发明提供了一种基于GNSS与测量机器人融合的拱坝表面变形监测系统,将GNSS与测量机器人技术相融合,两种方法互补不足,实现拱坝大坝表面变形高效准确的自动观测。在此基础上通过结合BIM技术将结构信息和监测数据动态关联,并构建了包含多种机器学习等人工智能方法的实 全部
背景技术:
目前拱坝表面变形监测技术以人工操纵和观测仪器进行监测为主,这类监测技术 采用激光垂直法、前方交汇法、视准线法等观测方法,采用人工测量的形式进行测量,具有 较高的精度但是频率较低,大多只能达到一个月一次左右,且受到人员操作技术水平和测 量环境影响较大。随着各类新型监测手段的不断发展,自动化监测设备由于其运行和观测 过程实现了完全自动化,具有可靠性和即时性的特点,在拱坝表面变形监测领域得到了发 展和应用。 近年来全球导航卫星系统(GNSS)由于其具有全天候、采集间隔短、容易实施长距 离的精确定位等特点在大坝变形监测等领域得到成功应用。同时,GNSS设备具有良好的自 动化和集成性能,可以实现在较大工程区域内的复杂测量任务,优越的工作性能是常规测 量作业难以比拟的。GNSS虽然拥有众多的优势,但是在该技术应用到拱坝表面变形监测时, 在测量精度上有着明显的缺失。目前GNSS系统在静态水平测量上精度最高大约3mm、垂直测 量上最高约为5mm,这与规范要求的拱坝变形监测精度要求(坝体水平位移径向2.0mm、切向 1.0mm,垂直位移1.0mm)相差较大。 测量机器人技术在全站仪的基础上发展而来,能够进行自动驱动搜索和自主跟 踪,并且能够精确照准目标获取目标方向、距离及坐标等空间信息。通过开发相应的控制程 序,测量机器人可以实现测量任务的自动化实施。目前,高精度的测量机器人可以达到测角 精度0.5”,测距精度0.6mm左右,完全能够满足拱坝表面变形的观测需求。但是,测量机器人 同时存在对测量环境能见度要求较高的问题,且要求所有测点不受遮挡。结合拱坝运行特 点,在台风、暴雨等极端气候条件下的实时安全监测对保障大坝安全运行尤为重要,而在这 样的环境下测量机器人恰恰是难以实现准确监测。
技术实现要素:
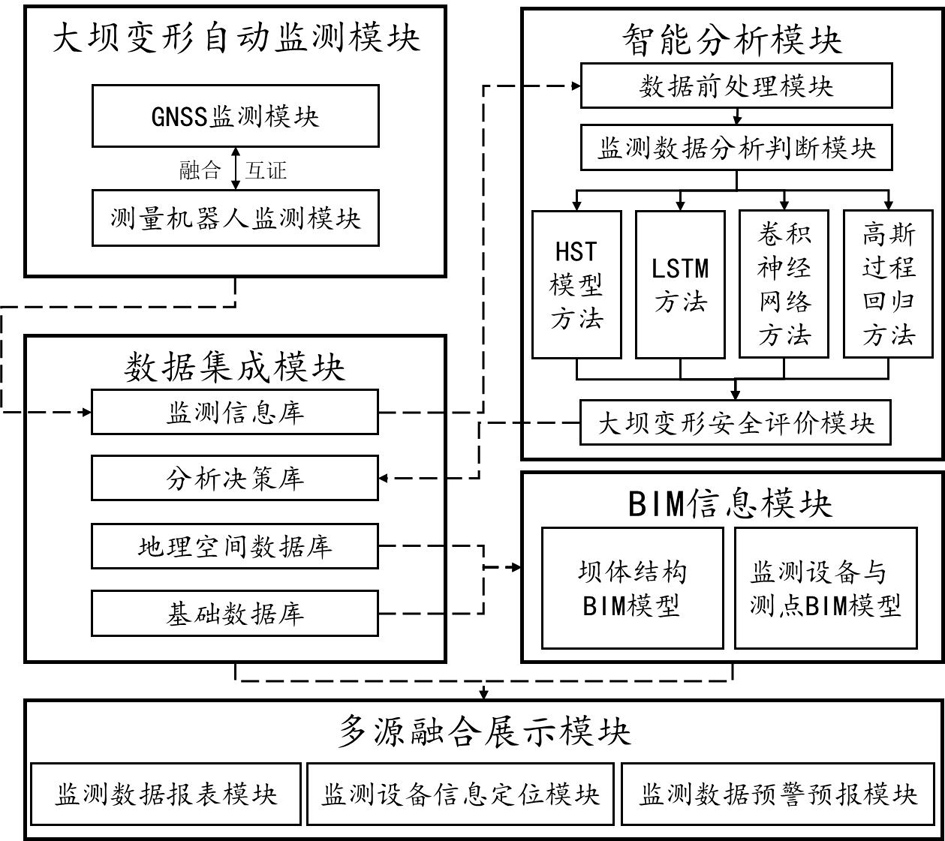
综上,为了实现对拱坝表面变形情况的实时监控,掌控大坝的实时位移和安全状 态,并且对可能存在的安全风险做的排查和预警,需要对拱坝表面变形进行自动化监测。考 虑到目前尚未有将GNSS技术与测量机器人技术相结合的拱坝表面变形观测技术,本发明提 出将两种技术的融合,将二者进行优势互补,一方面可以实现全天候、高频率的实时监控, 一方面又能够保障拱坝关键部位变形的高精度测量,进一步提升拱坝变形监测的自动化和 智能化。 为了克服现有技术的缺陷,本发明将GNSS与测量机器人技术相融合,两种方法互 补不足,实现拱坝大坝表面变形高效准确的自动观测。在此基础上通过结合BIM技术将结构 信息和监测数据动态关联,并构建了包含多种机器学习的人工智能方法的实时评估体系, 4 CN 111551147 A 说 明 书 2/7 页 形成一套基于GNSS与测量机器人技术的拱坝表面变形监测系统,可以协助工作人员高效完 成拱坝变形监测资料的分析评估工作,提高大坝信息化管理水平。 本发明具体采用以下技术方案: 一种基于GNSS与测量机器人融合的拱坝表面变形监测系统,其特征在于:将GNSS 监测装置采集的数据和测量机器人监测装置采集的数据导入并融合至同一监测软件。 优选地,所述GNSS监测装置的信号接收设备型号为Leica GR50;所述测量机器人 监测装置的全站仪型号为Leica TS60;所述监测软件为Leica公司的GeoMos软件。可以实现 对GNSS和测量机器人监测数据的统一收集和管理输出。 优选地,所述GNSS监测装置采用扼流圈天线并支持三星八频卫星系统的GNSS信号 接收装置,与所述测量机器人监测装置的测点所采用的棱镜装置布置在同一观测墩上。 优选地,监测系统包括: 相连接的大坝变形监测模块、数据集成模块和智能分析模块; 所述大坝变形监测模块包括:GNSS监测装置和测量机器人监测装置;两个测量模 块通过导线接入统一的监测软件,并导入信息到数据集成模块的监测信息库,形成大坝表 面变形的采集系统; 所述数据集成模块包括:监测信息库和分析决策库;所述监测信息库存储大坝变 形监测数据、水文信息和雨量信息,用于支持大坝安全分析的各类业务应用和分析应用;所 述分析决策库用于存储智能分析模块的处理结果数据; 数据集成模块包含相关基础数据、监测数据、模型算法、指标评价体系等数据应 用,为大坝安全运行、大坝监测预警指标、大坝监测预测分析等提供数据支撑; 所述智能分析模块包括:原始监测数据前处理模块、监测数据分析判断模块和大 坝变形安全评价模块;所述原始监测数据前处理模块用于对原始监测数据进行去噪操作; 所述监测数据分析判断模块用于通过HST模型方法和/或LSTM方法和/或高斯过程回归方法 和/或卷积神经网络方法对监测数据进行趋势分析和测值判断;所述大坝变形安全评价模 块根据监测数据分析判断模块的计算结果进行安全评价,明确各监测点的安全容许范围, 并针对变形关键部位进行重点关注,对当前的大坝变形安全情况进行评价,当测值超过容 许范围时发出警报; 优选地,所述数据集成模块还包括:基础数据库和地理空间数据库;所述基础数据 库存储大坝信息和流域地形信息,作为大坝安全管理、分析、展示等方面应用的基础信息; 所述地理信息基础空间数据库存储大坝空间信息和水利基础设施分部信息,用以支撑BIM 模型在GIS地图展示和提供基础地理信息数据。 优选地,监测系统还包括:连接基础数据库和地理空间数据库的BIM信息模块和多 源融合展示模块; 所述BIM信息模块用于构建大坝结构的BIM模型和监测设备与测点BIM模型; 所述多源融合展示模块包括监测设备信息定位模块、监测数据报表模块和监测数 据预警预报模块;所述监测设备信息定位模块用于将大坝表面变形监测设备信息、变形监 测实时数据与BIM信息模型相关联;所述监测数据报表模块用于实现监测数据报告的展示 和监测周报、月报的自动生成;所述监测数据预警预报模块用于发出监测数据预警预报信 息。 5 CN 111551147 A 说 明 书 3/7 页 优选地,所述多源融合展示模块还包括系统的界面GUI及选项按钮对应的触发模 块,包括:变形异常测值报警触发模块、以人机交互为目的的模型漫游触发模块、监测点和 基准点巡查漫游触发模块、预设巡检线路的漫游触发模块、监测数据报表生成触发模块、工 程涉及图纸和基础资料查询按钮触发模块。 优选地,所述监测数据预警预报模块以弹窗的形式对出现预警情况进行警报通 知。 作为本发明的进一步技术方案,所述数据集成模块可以通过现地测控传输层、数 据中心库、服务支撑层、应用层的结构实现;其中现地测控传输层为大坝监测传感器采集软 件提供传输通道;数据中心库即包含基础数据库、地理空间数据库、监测信息库、分析决策 库,用于监测系统所有相关信息的存储和管理;服务支撑层提供系统通用服务包括:统一用 户管理、数据交换、报表组件、统一访问接口和BIM模型服务;应用层包括对接多源融合展示 模块的应用内容,包括大坝三维信息化和大坝安全监测与预警。 作为本发明的进一步技术方案,所述智能分析模块中采用HST模型方法对拱坝变 形监测数据序列进行训练和学习,将拱坝径向位移按照形成原因,分解为水压分量δH、温度 分量δT、时效分量δθ,设模型随机误差为ε,则拱坝径向位移表示为: δ=δH(t) δT(t) δθ(t) ε 其中:δH(t)为水压分量,δT(t)为温度分量,δθ(t)为时效分量; 水压分量δH(t)选取四项因子,即:X =H-H ,X =H2 21 0 2 -H0 ,X3=H3-H 3 4 40 ,X4=H -H0 ,其 中H0为初始测日库水位监测值,H为当日水位监测值; 温 度 分 量 选 取 多 周 期 的 间 谐 波 作 为 因 子 ,包 含 四 项 分 别 为 : 以及 其中t0为初始测日到监测序列的首测日累计天数,t为监测序列的 首测日到监测当天累计天数; 时效分量δθ(t)选用线性函数、对数函数组成的多项式作为因子,两项因子分别 为:X9=θ-θ0,X10=lnθ-lnθ0,其中θ为监测日至始测日的累计天数除以100即:θ=t/100,θ0 为首个测值日到实测日的累计天数除以100即:θ0=t0/100。 作为本发明的进一步技术方案,所述智能分析模块的处理过程包含以下步骤: 步骤1:根据选择的分析监测时段,从监测信息库中读取相应测点的监测数据; 步骤2:根据环境量测值,计算各位移因子分量,根据各监测时间对应的位移因子 分量,构建模型的输入矩阵,同时根据实测位移值形成输出向量。 步骤3:根据所选批次大小将输入矩阵转换为训练集和测试集; 步骤4:选择分析模型; 步骤5:根据所选分析模型进行训练,通过测试集验证模型训练效果; 步骤6:选用训练效果较好的模型对实测值进行测值评估,根据准则判断变形是否 处于安全范围,对超出范围的测点进行标注,同时系统进行报警。 作为本发明的进一步技术方案,所述多源融合展示模块中通过系统界面GUI可以 对智能分析模块的步骤4中分析模型进行选择,包括:LSTM模型、HST模型、高斯过程回归模 6 CN 111551147 A 说 明 书 4/7 页 型和卷积神经网络模型。 作为本发明的进一步技术方案,所述BIM信息模块存储包含坝体、地形以及其他实 体结构的三维模型信息,监测设备观测点、基准点、和测量位置的位子坐标、设备型号等参 数化信息,满足多源融合展示模块对监测系统三维数字化信息的需要。 本发明及其优选方案采用以上技术方案与现有技术相比,具有以下技术效果: 1 .本发明所提出的基于GNSS与测量机器人技术的拱坝表面变形监测系统将GNSS 与测量机器人技术相融合,两种方法互补不足,将GNSS技术具有的全天候、采集间隔短、无 需通视条件等特点与测量机器人测量精度高符合监测规范要求的优势相结合,实现拱坝大 坝表面变形高效、准确的自动化观测。 2.本发明所提出的基于GNSS与测量机器人技术的拱坝表面变形监测系统通过构 建拱坝监测体系的信息库,对包括大坝基础信息、BIM模型信息、监测数据信息、分析决策方 法等进行统一管理。通过开发融合展示平台对拱坝表面变形系统的信息展示、分析处理、预 警预报等功能模块进行科学有序的管理; 3.本发明所提出的基于GNSS与测量机器人技术的拱坝表面变形监测系统通过构 建包括人工智能方法的多种分析方法的智能分析模块,能够实现对拱坝表面变形数据的高 效分析和高精度预估评价,具有重要的工程实际意义。 附图说明 图1为本发明实施例的监测系统结构示意图; 图2为本发明实施例的测点1实测位移过程线和对应的上游水位过程线图; 图3为本发明实施例的测点1的LSTM监控模型输出结果图; 图4为本发明实施例的三维模型展示平台框架图。











