
技术摘要:
本发明提供一种机械外骨骼数据采集控制装置,包括:第一牵引绳和壳体护套,壳体护套的一端设置有定位块,壳体护套的另一端设置有套筒,壳体护套包括有多个限位块,第一牵引绳的一端设置有与定位块对应的调节块,第一牵引绳的另一端设置有第一位移传感器,第一牵引绳上 全部
背景技术:
随着现代社会人们身体健康问题的频发,老年人的健康问题和一些残疾人的健康 问题得到了全社会的广泛关注,其中肢体不灵便是影响人们生活的重要问题。外骨骼控制 装置可以为肢体行动困难者提供外在助力,帮助其恢复一定的运动能力,对于提高肢体行 动困难者、减轻家庭和社会的负担具有重要意义。 外骨骼数据采集控制装置是安装在外骨骼控制装置的一个采集控制装置,由采集 系统和控制系统组成,现有的外骨骼同步信息采集系统主要有两大类,一是在人体的不同 位置处放置传感器来采集用户的运动信号;二是将生物量传感器贴合在人体皮肤上采集人 体中枢神经的肌电信号,来实现人体关节运动的意图。 但本申请发明人在实现本申请实施例中发明技术方案的过程中,发现上述技术至 少存在如下技术问题: 1、由于需要在人体不同的位置处放置传感器,会使得采集装置的成本过高,且设 置有多个传感器使得整体的结构较为复杂,出错率较高,而且无法精确采集到对应的运动 信息,使用效果较差; 2、设置生物量传感器,利用肌电信号来控制,由于目前生物传感系统不成熟,不能 使得肌电信号与关节力矩的完全对应,使得整个采集装置的信息采集速率较慢且成本较 高。
技术实现要素:
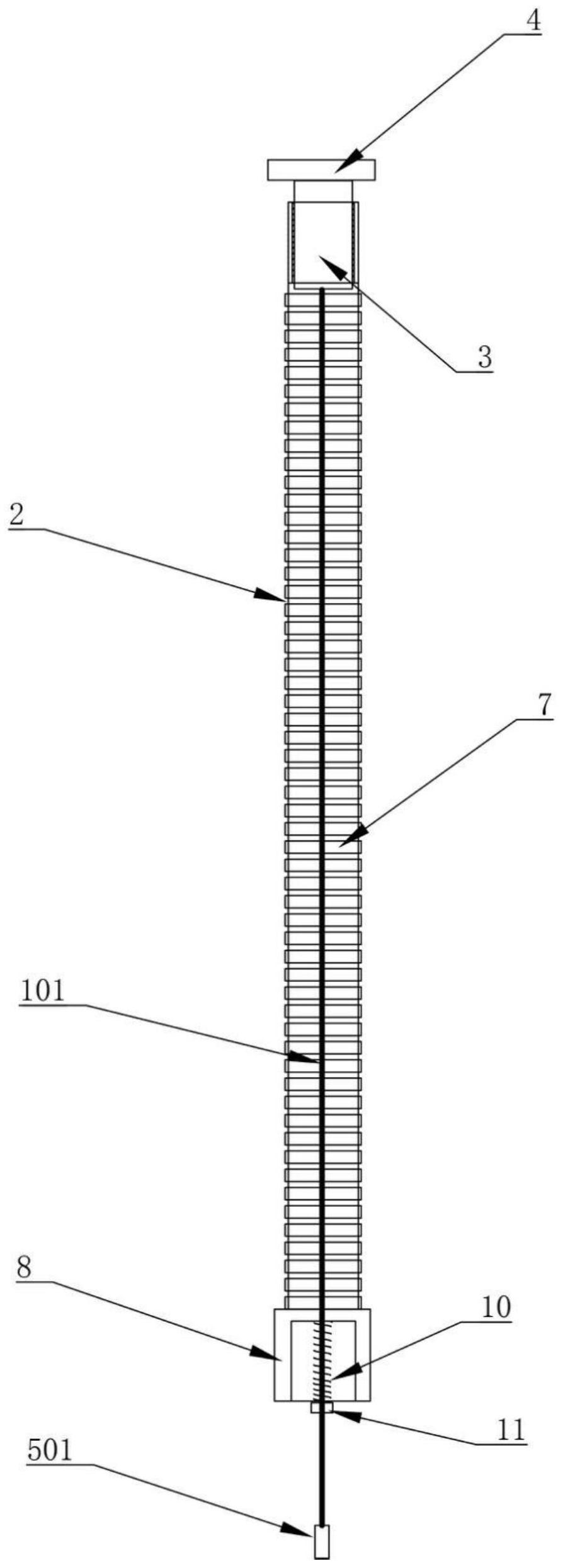
(一)要解决的技术问题 本发明要解决的技术问题是提供一种能够精准反应人体运动细节、数据采集精度 高且结构简单的机械外骨骼数据采集控制装置。 (二)技术方案 为解决上述技术问题,本发明提供了一种机械外骨骼数据采集控制装置,包括:第 一牵引绳和壳体护套,所述壳体护套的一端设置有定位块,所述壳体护套的另一端设置有 套筒,所述第一牵引绳的一端设置有与所述定位块对应的调节块,所述调节块连接外部电 机,所述第一牵引绳的另一端设置有第一位移传感器,所述第一牵引绳上设置有第一限位 块,所述第一限位块和所述套筒之间设置有第一弹性件;工作时,通过肢体驱动所述壳体护 套和所述第一牵引绳受力弯曲,触发所述第一位移传感器工作,所述第一位移传感器产生 信号并经过处理后传输至外部电机驱动所述第一牵引绳工作,采用此结构通过传感器信号 接收实现对骨骼的控制运动,整体的结构较为简单,数据采集精度高,能够反应人体运动细 节,实现骨骼运动的精准化。 进一步的,所述第一牵引绳上设置有第一放大器,所述第一位移传感器通过所述 3 CN 111603361 A 说 明 书 2/5 页 第一放大器连接所述第一牵引绳,设置有所述第一放大器和所述第一位移传感器采集肢体 弯曲信号,数据采集精度高,驱动电机能够精准控制牵引绳的运动。 进一步的,一种机械外骨骼数据采集控制装置还包括有第二牵引绳,所述第二牵 引绳的一端连接有调节杆,所述调节杆连接外部电机,所述第二牵引绳的另一端设置有第 二位移传感器,设置有所述第二位移传感器采集肢体旋转信号,数据采集精度高,驱动电机 能够精准控制牵引绳的运动,设置有调节杆能使用户根据使用需求进行长度调节,方便快 捷。 进一步的,所述第一牵引绳上设置有第一放大器,所述第一位移传感器通过所述 第一放大器连接所述第一牵引绳,所述第二牵引绳上设置有第二放大器,所述第二位移传 感器通过所述第二放大器连接所述第二牵引绳,设置有所述第二放大器和所述第一放大 器,能够对位移传感器的肢体信号放大,提高数据采集的精度。 进一步的,所述第一放大器包括:第一线圈和第二线圈,所述第一线圈和所述第二 线圈分别设置在所述第一放大器的两侧,所述第一线圈和所述第二线圈通过第一转轴连 接,所述第一位移传感器的一端连接所述第一线圈,所述第一牵引绳的一端连接所述第二 线圈,整体的结构简单,所述第一放大器的设置使数据采集的精度更高,所述第一线圈和所 述第二线圈分开设置能够避免相互影响产生误差,能够精准反应人体运动细节。 进一步的,所述第一放大器靠近所述第一位移传感器的一侧设置有第二弹性件, 所述第一位移传感器的一端设置有与所述第二弹性件对应的第二限位块,设置有所述第二 弹性件和第二限位块对所述第一位移传感器和所述第二牵引绳起到限位作用。 进一步的,所述第二放大器包括:第三轮圈,所述第三轮圈通过第二转轴转动设置 在所述第二放大器上,设置有第三轮圈,结构简单,能够实现对第三位移传感器的信号放大 功能,提高系统的数据采集精度。 进一步的,所述第二位移传感器的一端连接所述第三轮圈,所述第二牵引绳的一 端固定设置在所述第二放大器的一侧,整体的结构合理,能够有效地保护所述第二位移传 感器,使所述第二位移传感器的采集精度更高。 进一步的,所述第二放大器靠近所述第二位移传感器的一侧设置有第三弹性件, 所述第二位移传感器的一端设置有与所述第三弹性件对应的第三限位块,设置有所述第三 弹性件和所述第三限位块能够对所述第二位移传感器起到限位保护作用,保证其正常的工 作使用。 进一步的,所述壳体护套包括有多个限位块,所述限位块设置在所述套筒和所述 定位块之间,所述调节块和所述定位块通过螺纹连接,对外骨骼数据采集控制装置起到定 位保护作用,保证其正常工作使用。 (三)有益效果 本发明一种机械外骨骼数据采集控制装置相对于现有技术的优点在于: 1)、数据采集精度高且结构简单,制造成本低,设置有第一位移传感器和第一放大 器用来采集肢体弯曲信号,设置第二位移传感器和第二放大器用来采集旋转信号,并驱动 电机能够精准控制牵引绳的运动; 2)、具有位移信号放大功能,信号反应灵敏且出错率低,用户使用体验效果好,设 置有第一放大器和第二放大器,将第一位移传感器和第二位移传感器的位移信号强化放 4 CN 111603361 A 说 明 书 3/5 页 大,使得数据采集控制过程中的信号转换效率高,位移信号传输的出错率更低; 3)、具有调节功能,能满足不同人群的使用需求,设置有调节块和定位块能够控制 牵引绳的长度,使得用户能够根据自己所处的环境或使用条件来自行控制装置的长度来实 现转动或者弯曲的角度。 附图说明 图1为本发明一种机械外骨骼数据采集控制装置实施例一的结构示意简图; 图2为本发明一种机械外骨骼数据采集控制装置实施例二的局部结构示意简图; 图3为本发明一种机械外骨骼数据采集控制装置实施例三的结构示意简图; 图4为本发明一种机械外骨骼数据采集控制装置实施例四的局部结构示意简图; 其中:101为第一牵引绳、102为第二牵引绳、2为壳体护套、3为定位块、4为调节块、 501为第一位移传感器、502为第二位移传感器、601为第一放大器、602为第二放大器、611为 第一线圈、621为第二线圈、612为第三轮圈、7为限位块、8为套筒、9为调节杆、1001为第一弹 性件、1002为第二弹性件、1003为第三弹性件、1101为第一限位块、1102为第二限位块、1103 为第三限位块。











