
技术摘要:
本发明公开了一种基于激光三角法的静态扭矩测量装置包括外桶、输入轴,所述外桶的前后两端分别固定连接顶盖和法兰盘,所述外桶上侧固定有图像处理模块,所述外桶内设有CCD相机和半导体激光器,所述外桶内紧邻顶盖固定有轴承座a,所述轴承座a上安装有轴承a,所述外桶右 全部
背景技术:
扭矩测量装置在机械和自动化领域有着广泛的应用,特别是在机器人减速器输入 输出转矩测量领域,扭矩测量装置作为转矩测量的关键部件,其所测量得到的扭矩值也是 机器人减速器性能的重要物理量,因此对扭矩测量至关重要。现有的扭矩测量装置及方法, 主要有应变式、转角式和磁弹式三类。这三种方法都有其缺陷,第一种方法其精度、寿命和 工作可靠性会受到湿度、温度、振动等因素的影响;第二种方法中由于一般转轴的刚度都很 大,实际产生的扭转变形角非常小,对转轴微小变形角的测量准确度会极大的限制扭矩测 量的精度;第三种方法容易受到现场电磁干扰的影响,可靠性差,抗干扰能力差,测量精度 有限。
技术实现要素:
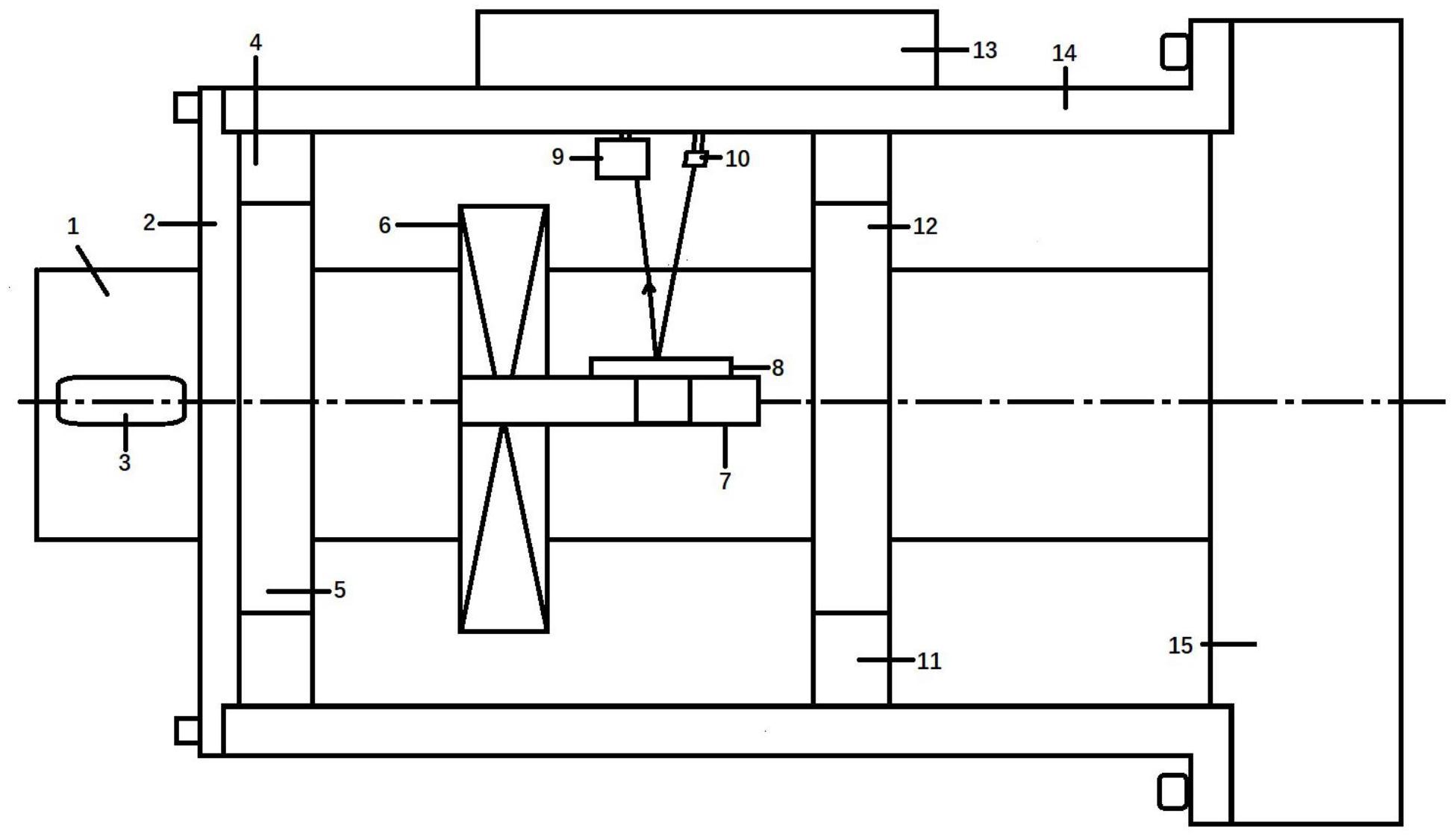
为了克服现有技术领域存在的上述技术问题,本发明的目的在于,提供一种基于 激光三角法的静态扭矩测量装置,具有很高的分辨率和精度,可以随时进行零位标定,并可 进行正反向在线测试,特别适合轴径大、刚度强、扭转角特别小的情况使用。 本发明提供的一种基于激光三角法的静态扭矩测量装置,包括外桶、输入轴,所述 外桶的前后两端分别固定连接顶盖和法兰盘,所述外桶上侧固定有图像处理模块,所述外 桶内设有CCD相机和半导体激光器,所述外桶内紧邻顶盖固定有轴承座a,所述轴承座a上安 装有轴承a,所述外桶右部内桶壁固定有轴承座b,所述轴承座b上安装有轴承b,所述输入轴 穿过轴承a、轴承b贯穿于外桶,所述输入轴上固定有卡环,外桶内设有位移测量臂通过卡环 与被测轴固定连接,随被测轴一同旋转,所述位移测量臂端部安装有反射镜。 所述顶盖通过止口定位并通过螺钉固定在外桶上,所述外桶通过止口定位并通过 螺钉固定在法兰盘上。 所述输入轴左端设有平键,用于对外连接,从而加载待测扭矩。 所述CCD相机和半导体激光器通过数据线与图像处理模块连接。 所述反射镜在重力作用下自由下垂面向CCD相机和半导体激光器。 所述CCD相机和半导体激光器通过螺钉固定在外桶内桶壁上。 所述CCD相机和半导体激光器两者沿垂直于输入轴轴线方向呈30°夹角安装。 所述输入轴右端固定在法兰盘中心。 所述输入轴用于加载待测扭矩,法兰盘用于固定测量装置,进行扭矩测量,通过卡 4 CN 111721454 A 说 明 书 2/5 页 环、位移测量臂及反射镜、CCD相机、半导体激光器等机构,巧妙地将对输入轴扭矩的测量转 换为对轴上两点相对位移的测量。相对位移测量采用激光三角法,通过对相机相平面上光 斑中心位置变化的测量,计算后得到卡环所在位置和法兰盘之间的相对位移。在两点间轴 向距离已知的情况下,最后根据相对位移和输入轴所加载扭矩之间的关系,计算得到所加 载的扭矩。这种方法具有很高的位移测量分辨率和精度,可以随时进行零位标定,并可进行 正反向在线测试,特别适合轴径大、刚度强、扭转角特别小的情况使用。本发明同时通过轴 承a、b和轴承座a、b,最大限度限制径向力带来的位移对测试结果的影响,提高测试精度。 所述的输入轴静止或没有扭矩加载的情况下,CCD相机相平面测到的激光光斑中 心位置对应系统零位,对系统零位进行标定。工作时被测转轴在所加载扭矩作用下发生扭 转变形,带动位移测量臂、反射镜与CCD相机和半导体激光器发生相对位移,CCD相机相平面 测到的激光光斑中心位置发生变化,在正向扭矩或反向扭矩作用下,光斑中心位置变化距 离与垂直于轴向的位移成比例关系,垂直于轴向的位移与扭矩载荷成正比,比例系数由测 量构件决定,图像处理模块根据所采集光斑中心位置计算出实时扭矩载荷数据,通过无线 方式发送出去。 所述的CCD相机可选工业黑白相机,根据测量范围和分辨率要求选择CCD相机性能 参数。 本发明的一种基于激光三角法的静态扭矩测量装置的使用方法如下: 一、检定静态扭矩测量装置:采用国家计量院的扭矩加载装置分别给所述基于激光三 角法的静态扭矩测量装置沿正向和反向由小到大逐步施加扭矩,直到设定值,所述CCD相 机、半导体激光器和图像处理模块获得检定时相对位移d,分别记录检定时静态扭矩测量装 置沿正向和反向输入的扭矩值T与CCD相机、半导体激光器和图像处理模块所获得检定时相 对位移d之间的对应关系; 二、采用步骤一所述检定好的基于激光三角法的静态扭矩测量装置测量静态扭矩: (1)将待测扭矩输出装置通过联轴器连接在静态扭矩测量装置输入轴上;输入轴左端 上端通过平键和联轴器相连,并使用螺钉拧紧;静态扭矩测量装置右端通过法兰盘和固定 装置相连,并使用螺钉拧紧;检查静态扭矩测量装置安装状态,确保输入轴处于良好的传动 状态,确保法兰盘处于固定状态; (2)轴系状态确认完毕后,使用待测扭矩输出装置分别沿正向和反向缓慢施加线性增 加的转矩值直到满量程,让静态扭矩测量装置输入轴1有旋转的趋势,从而使各部件发生变 形以传递扭矩,但不发生真正的转动,在测量过程中,同步记录静态扭矩测量装置中根据 CCD相机、半导体激光器和图像处理模块所获得相对位移d计算出的输入的扭矩值T和待测 扭矩输出装置所加载的扭矩; (3)依次重复步骤(2)三次,根据三次测量中每个扭矩测量点的测量值,经取平均值处 理后计算出待测扭矩输出装置的各扭矩测量点的实际输出扭矩值,将得到的各测量点的实 际输出扭矩值列表如下: 扭矩输出值 …… 实际扭矩值 在使用待测扭矩输出装置输出扭矩时,可以根据得到的扭矩值表对待测扭矩输出装置 输出扭矩进行补偿。 5 CN 111721454 A 说 明 书 3/5 页 本发明提供的一种基于激光三角法的静态扭矩测量装置,其有益效果在于,解决 了机器人减速器输入输出转矩测量不准确的问题,通过采用激光三角法,对相对位移进行 测量,在小量程范围内很容易达到0.01μm的测量精度;根据相对位移和输入轴所加载扭矩 之间的关系,计算得到所加载的扭矩,这种扭矩测量装置具有很高的分辨率和精度,可以随 时进行零位标定,并可进行正反向在线测试,特别适合轴径大、刚度强、扭转角特别小的情 况使用。 附图说明 图1是本发明测量原理示意图; 图2是本发明一个实施例的整体结构示意图; 图中标注: 1、输入轴;2、顶盖;3、平键;4、轴承座a;5、轴承a;6、卡环;7、位移测量臂;8、反射镜;9、 CCD相机;10、半导体激光器;11、轴承座b;12、轴承b;13、图像处理模块;14、外桶;15、法兰 盘。











