
技术摘要:
本发明公开了一种用于永磁同步电机交直轴解耦的控制方法及装置,所述方法包括:采集电机定子三相电流后进行同步旋转坐标转换,得到永磁同步电机在同步旋转坐标体系下的d轴电流与q轴电流;将电流环耦合项作为外部因素,构建永磁同步电机电流环标称模型;通过惯性环节实 全部
背景技术:
永磁同步电机由于具有高效率、高功率密度等优点而被广泛应用于各种场合,在 高性能应用场合一般会要求永磁同步电机拥有较为快速的电磁转矩响应,以保证整个系统 的高性能。目前常用的解耦方法为利用内模原理进行前馈解耦,根据电机实际的各项参数, 利用内模原理进行前馈解耦,即通过电流反馈值建立电压补偿项,使电压补偿项与电机电 压耦合项正好抵消,实现电流环的解耦控制,以达到较好的控制效果。 但是,在对现有技术的研究与实践的过程中,本发明的发明人发现,利用内模原理 进行前馈解耦存在一些缺陷,不仅需要精确的电机电阻、电感、磁链等参数才能达到较好的 解耦效果;并且在复杂的工况下,电机运行过程中存在参数变化、突加负载等干扰问题,在 电感参数不匹配时该控制策略不能实现电流环完全解耦控制,即解耦项不能完全抵消永磁 同步电机内部的耦合作用,从而影响系统的解耦效果和动态响应,导致解耦果和电机控制 性能下降。因此,亟需一种能够克服上述缺陷的永磁同步电机交直轴解耦控制方法。
技术实现要素:
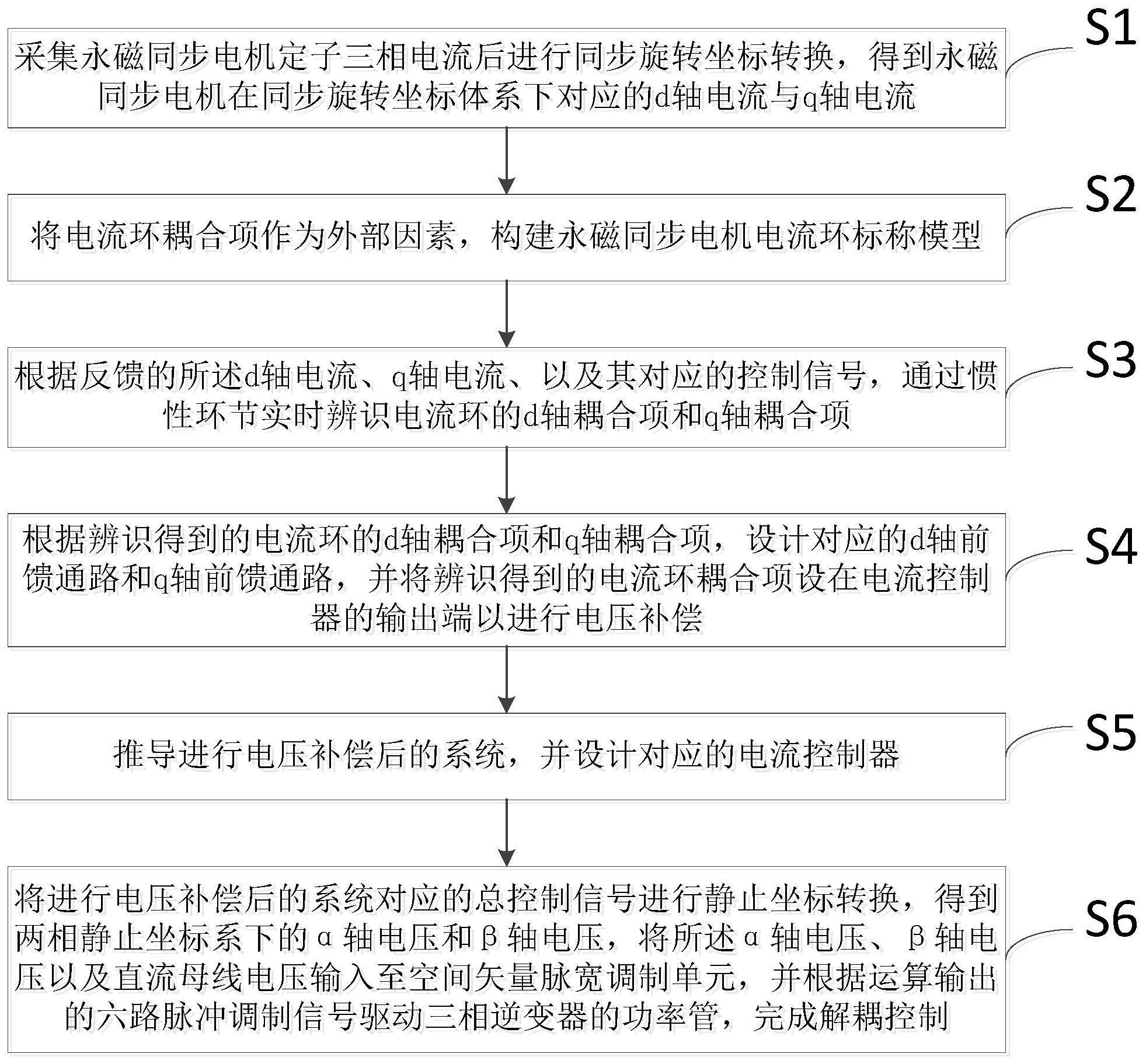
本发明实施例所要解决的技术问题在于,提供一种用于永磁同步电机交直轴解耦 的控制方法及装置,仅需要永磁同步电机电阻以及电感的估计值即可永磁同步电机交直轴 解耦控制,不需要测量永磁体磁链以及电机转速等信息,降低电机参数对解耦效果的影响, 适用于更多工况复杂的场合。 为解决上述问题,本发明的一个实施例提供一种用于永磁同步电机交直轴解耦的 控制方法,至少包括如下步骤: 采集永磁同步电机定子三相电流后进行同步旋转坐标转换,得到永磁同步电机在 同步旋转坐标体系下对应的d轴电流与q轴电流; 将电流环耦合项作为外部因素,构建永磁同步电机电流环标称模型; 根据反馈的所述d轴电流、q轴电流、以及其对应的控制信号,通过惯性环节实时辨 识电流环的d轴耦合项和q轴耦合项; 根据辨识得到的电流环的d轴耦合项和q轴耦合项,设计对应的d轴前馈通路和q轴 前馈通路,并将辨识得到的电流环耦合项设在电流控制器的输出端以进行电压补偿; 推导进行电压补偿后的系统,并设计对应的电流控制器; 将进行电压补偿后的系统对应的总控制信号进行静止坐标转换,得到两相静止坐 标系下的α轴电压和β轴电压,将所述α轴电压、β轴电压以及直流母线电压输入至空间矢量 脉宽调制单元,并根据运算输出的六路脉冲调制信号驱动三相逆变器的功率管,完成解耦 控制。 5 CN 111555687 A 说 明 书 2/10 页 进一步地,所述同步旋转坐标转换,具体为:根据同步旋转坐标转换公式将所述永 磁同步电机定子三相电流进行同步旋转坐标转换,得到永磁同步电机在同步旋转坐标体系 下对应的d轴电流与q轴电流; 其中,所述同步旋转坐标转换公式,具体为: 式中,ia、ib、ic分别为永磁同步电机定子三相电流,id和iq分别为d轴、q轴电流,θ为 永磁同步电机转子电角度。 进一步地,所述永磁同步电机电流环标称模型,具体为: 其中,Id(s)、Iq(s)分别为d轴电流、q轴电流的拉普拉斯形式,Ud(s)和Uq(s)为d轴 输入电压和q轴输入电压,ωe是电机转子电角速度,Ld和Lq分别是定子绕组d轴、q轴的等效 电感,R是定子绕组电阻,ψf是永磁体磁链。 进一步地,所述通过惯性环节实时辨识电流环的d轴耦合项和q轴耦合项,具体为: 设计如第一公式所示的结构实时辨别电流环的d轴耦合项; 设计如第二公式所示的结构实时辨别电流环的q轴耦合项; 其中,所述第一公式具体为: 式中, 为实时辨识的电流环d轴耦合项,Id(s)为d轴电流的拉普拉斯形式, 为 定子绕组电阻的实际电阻值, 为定子绕组d轴的等效电感的实际电感值;Ud(s)为d轴输入 电压; 为惯性环节系数,b为截止频率; 所述第二公式具体为: 式中, 为实时辨识的电流环q轴耦合项,Iq(s)为q轴电流的拉普拉斯形式, 为 定子绕组电阻的实际电阻值, 为定子绕组q轴的等效电感的实际电感值;Uq(s)为d轴输入 电压; 为惯性环节系数,b为截止频率。 进一步地,所述d轴前馈通路,具体为: 6 CN 111555687 A 说 明 书 3/10 页 式中,U1(s)为d轴控制器输出的拉普拉斯形式, 为实时辨识的电流环d轴耦合 项; 所述q轴前馈通路,具体为: 式中,U2(s)为q轴控制器输出的拉普拉斯形式, 为实时辨识的电流环q轴耦合 项。 进一步地,所述电流控制器,具体为: 其中,Id(s)和Iq(s)分别为d轴电流、q轴电流的拉普拉斯形式,U1(s)和U2(s)为d 轴、q轴控制器输出的拉普拉斯形式, 为定子绕组电阻的实际电阻值, 和 分别是定子 绕组d轴、q轴的等效电感的实际电感值。 本发明的一个实施例还提供了一种用于永磁同步电机交直轴解耦的控制装置,包 括: 电流采集模块,用于采集永磁同步电机定子三相电流后进行同步旋转坐标转换, 得到永磁同步电机在同步旋转坐标体系下对应的d轴电流与q轴电流; 电流环标称模型模块,用于将电流环耦合项作为外部因素,构建永磁同步电机电 流环标称模型; 电流环耦合项模块,用于根据反馈的所述d轴电流、q轴电流、以及其对应的控制信 号,通过惯性环节实时辨识电流环的d轴耦合项和q轴耦合项; 电压补偿模块,用于根据辨识得到的电流环的d轴耦合项和q轴耦合项,设计对应 的d轴前馈通路和q轴前馈通路,并将辨识得到的电流环耦合项设在电流控制器的输出端以 进行电压补偿; 电流控制器模块,用于推导进行电压补偿后的系统,并设计对应的电流控制器; 解耦控制模块,用于将进行电压补偿后的系统对应的总控制信号进行静止坐标转 换,得到两相静止坐标系下的α轴电压和β轴电压,将所述α轴电压、β轴电压以及直流母线电 压输入至空间矢量脉宽调制单元,并根据运算输出的六路脉冲调制信号驱动三相逆变器的 功率管,完成解耦控制。 本发明的一个实施例提供了一种用于永磁同步电机交直轴解耦的控制终端设备, 包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程 序,所述处理器执行所述计算机程序时实现如上述的用于永磁同步电机交直轴解耦的控制 方法。 本发明的一个实施例提供了一种计算机可读存储介质,所述计算机可读存储介质 包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所 在设备执行如上述的用于永磁同步电机交直轴解耦的控制方法。 7 CN 111555687 A 说 明 书 4/10 页 实施本发明实施例,具有如下有益效果: 本发明实施例提供的一种用于永磁同步电机交直轴解耦的控制方法及装置,所述 方法包括:采集永磁同步电机定子三相电流后进行同步旋转坐标转换,得到永磁同步电机 在同步旋转坐标体系下对应的d轴电流与q轴电流;将电流环耦合项作为外部因素,构建永 磁同步电机电流环标称模型;根据反馈的所述d轴电流、q轴电流、以及其对应的控制信号, 通过惯性环节实时辨识电流环的d轴耦合项和q轴耦合项;根据辨识得到的电流环的d轴耦 合项和q轴耦合项,设计对应的d轴前馈通路和q轴前馈通路,并将辨识得到的电流环耦合项 设在电流控制器的输出端以进行电压补偿;推导进行电压补偿后的系统,并设计对应的电 流控制器;将进行电压补偿后的系统对应的总控制信号进行静止坐标转换,得到两相静止 坐标系下的α轴电压和β轴电压,将所述α轴电压、β轴电压以及直流母线电压输入至空间矢 量脉宽调制单元,并根据运算输出的六路脉冲调制信号驱动三相逆变器的功率管,完成解 耦控制。 与现有技术相比,本发明提供的一种用于永磁同步电机交直轴解耦的控制方法及 装置,仅需要永磁同步电机电阻以及电感的估计值,减少对永磁同步电机进行交直轴解耦 所需的参数信息;降低对永磁同步电机进行交直轴解耦所需参数精确度的依赖性;在提高 解耦效率的同时降低电机参数对解耦效果的影响,以适用于更多工况复杂的场合;并且本 发明仅需要一个惯性环节,步骤简单,易于实现,降低了对永磁同步电机进行交直轴解耦的 实现难度。 附图说明 图1为本发明第一实施例提供的一种用于永磁同步电机交直轴解耦的控制方法的 流程示意图; 图2为本发明第一实施例提供的另一种永磁同步电机交直轴解耦控制方法的流程 示意图; 图3为本发明第一实施例提供的包括永磁同步电机在内的解耦项辨识、补偿的传 递函数框图的示意图; 图4为本发明第一实施例提供的电机的d轴电流的仿真波形图; 图5为本发明第一实施例提供的电机的q轴电流的仿真波形图; 图6为本发明第二实施例提供的一种用于永磁同步电机交直轴解耦的控制装置的 结构示意图。











