
技术摘要:
本发明公开了一种基于SSVEP脑控机械臂抓取的生活辅助系统与方法,本系统包括脑电帽、电脑、意图表达界面、SSVEP解码单元和机械臂。本发明方法是:首先由专业人员帮助使用者佩戴好脑电帽,其次打开电脑端的意图表达界面,在意图表达界面出现刺激闪烁时,使用者根据自己 全部
背景技术:
据2019年报导中国有8500万残疾人,还有4400万失能和半失能老年人。他们很多 人都需要辅助器具。辅助器具是指补偿和替代人体功能的产品,是帮助残疾人和老年人提 高生活质量、增强社会参与能力的手段。中国残障人士数量很多,残疾导致的障碍会造成残 疾人生活中的各种困难,包括更加不良的健康状况、更低的教育接受能力、更差的经济参 与、更高的贫困率和更高的依赖性等。尤其对于语言沟通障碍和肢体活动能力的丧失的特 殊人群,参与正常的生活成了最大的挑战。因此,开发一种可以辅助老年人或残障人士日常 生活的脑控机械臂系统,尤其对肢体活动能力有障碍人群,提高他们的生活质量和主动参 与能力,解决生活不方便的问题十分必要,成为亟待解决的技术问题。
技术实现要素:
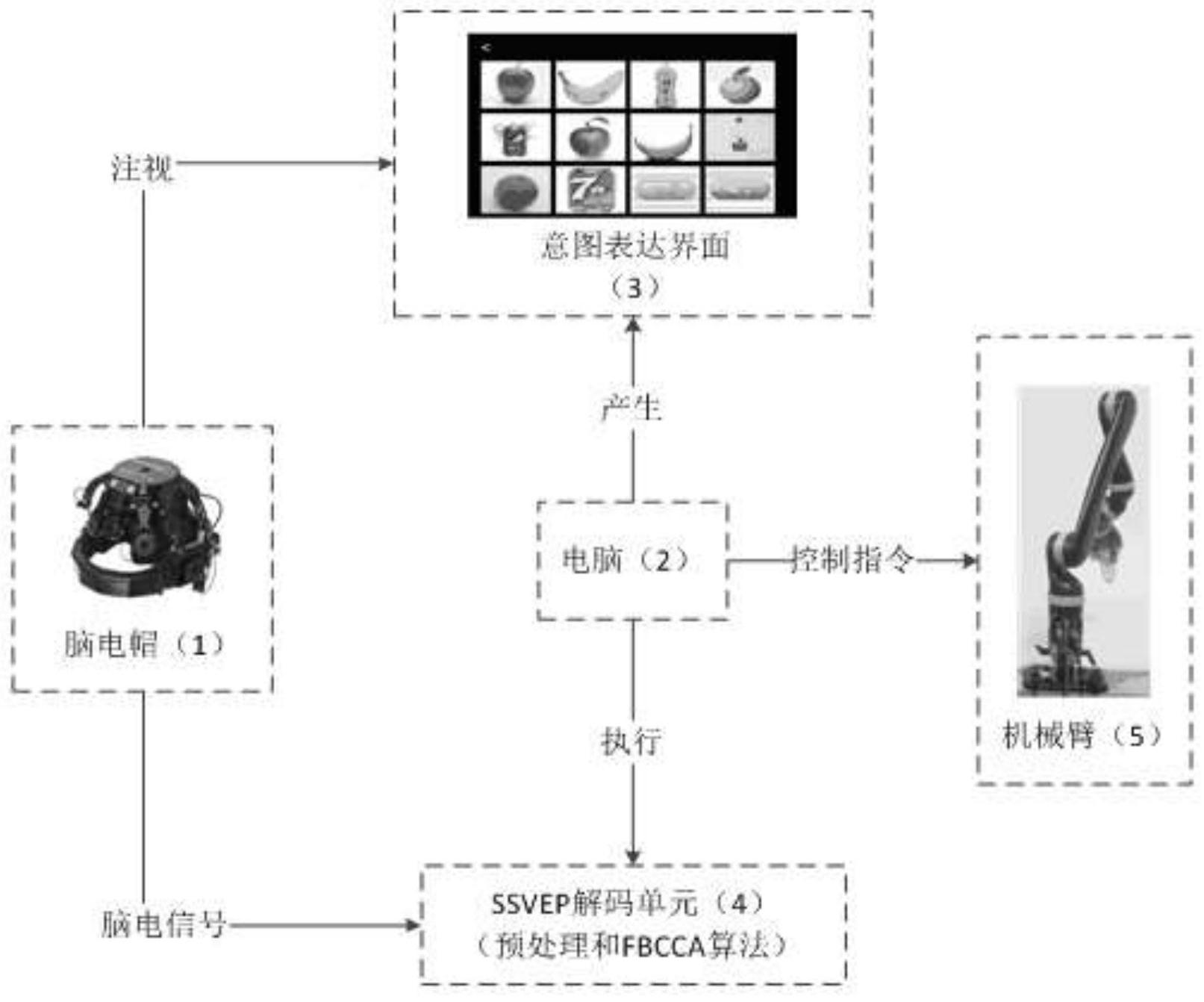
为了解决现有技术问题,本发明的目的在于克服已有技术存在的不足,提供一种 基于SSVEP脑控机械臂抓取的生活辅助系统与方法,其基本原理是意图表达界面上的每个 区块代表特定的物品,且这些区块以不同的频率闪烁,使用者根据自己的需求,即想要抓取 的物品,注视意图表达界面上的相应的代表该物品区块,脑电帽采集此时使用者脑电信号, 通过有线或无线的方式,传输至电脑端的SSVEP解码单元,进行滤波和FBCCA滤波器组典型 相关分析。解码出使用者被视觉刺激诱发的大脑电位对应的频率,通过该频率找到意图表 达界面对应的区块即知道使用者想要抓取的物品,进而电脑发送指令控制机械臂抓取相应 物品,这样即实现了辅助老年人和残障人抓取所需物品的操作。 为达到上述发明创造目的,本发明采用如下技术方案: 一种基于SSVEP脑控机械臂抓取的生活辅助系统,包括脑电帽、电脑、意图表达界 面、SSVEP解码单元和机械臂,所述脑电帽通过有线或者无线方式与电脑连接,电脑包含意 图表达界面和SSVEP解码单元,机械臂通过有线连接与电脑连接;由专业人员帮助使用者佩 戴好脑电帽,打开电脑端的意图表达界面,在意图表达界面出现刺激闪烁时,使用者根据自 己的需求,注视意图表达界面上的相应区块,脑电帽采集使用者此时的脑电信号,传输给电 脑端的SSVEP解码单元,通过预处理和滤波器组典型相关分析FBCCA算法进行解码,解码结 果转换成控制指令发送给机械臂,机械臂执行控制指令,依据规划的路径抓取相应物品。 作为本发明优选的技术方案,所述脑电帽,采用博瑞康24导联干电极帽,使用者头 皮无需打脑电膏,即可进行脑电信号采集。通过有线串口通讯方式与电脑连接,或者通过无 3 CN 111571619 A 说 明 书 2/6 页 线蓝牙方式与电脑连接;所述电脑包含意图表达界面和SSVEP解码单元;所述机械臂采用 Kinova6轴仿生机械臂,机械臂通过有线方式与电脑连接。 作为本发明优选的技术方案,所述意图表达界面包含12个区块,12个区块代表12 条指令:苹果1、香蕉1、绿茶、橙子、可乐、苹果2、香蕉2、矿泉水、橘子、七喜、取消和确认;使 用者先注视所需物品,然后注视取消或确认区块,确认区块激发后,机械臂执行抓取物品动 作。 作为本发明优选的技术方案,所述SSVEP解码单元对使用者的脑电信号首先进行 预处理,即滤波,然后采用FBCCA滤波器组典型相关分析,最终解码识别出使用者想要发送 的指令,从而实现使用者大脑控制机械臂抓取相应物品操作。 作为本发明优选的技术方案,机械臂通过正逆运动学原理进行路径规划,并且采 用连续轨迹规划避免出现卡顿现象。 一种基于SSVEP脑控机械臂抓取的生活辅助方法,采用本发明基于SSVEP脑控机械 臂抓取的生活辅助系统进行操作,操作步骤如下: 1)专业人员帮助使用者佩戴脑电帽; 2)打开意图表达界面; 3)当意图表达界面出现刺激闪烁时,使用者根据自己需求,注视相应区块;同时脑 电帽采集脑电信号,通过有线或者无线方式传输给电脑端的SSVEP解码单元; 4)SSVEP解码单元通过FBCCA算法解码; 5)SSVEP解码单元通过FBCCA算法解码后,发送控制指令给机械臂; 6)机械臂依据规划路径,抓取相应物品。 作为本发明优选的技术方案,在所述步骤2)中,设计的意图表达界面包含12个区 块,12个区块代表12条指令,苹果1、香蕉1、绿茶、橙子、可乐、苹果2、香蕉2、矿泉水、橘子、七 喜、取消和确认。 作为本发明优选的技术方案,在所述步骤3)中,使用者先注视意图表达界面中所 需物品对应区块,然后注视取消或确认区块。注视期间,其脑电信号通过有线或无线的方 式,传输给电脑端的SSVEP解码单元处理。 作为本发明优选的技术方案,在所述步骤4)中,SSVEP解码单元对使用者的脑电信 号进行预处理即滤波,FBCCA滤波器组典型相关分析,解码识别出使用者想要发送的指令, 从而实现使用者大脑控制机械臂抓取相应物品操作。 作为本发明优选的技术方案,在所述步骤5)中FBCCA算法实现脑电信号解码步骤 如下: 5-1)进行滤波器组分析,通过滤波器的多个不同通带将SSVEP脑电信号分解,得到 通过滤波器各子带后的子带信号; 5-2)将滤波所得各子带成分与标准正余弦参考信号进行相关性分析; 5-3)最大相关性对应频率即为识别结果;依据算法识别结果,判断确认区块激发 后,发送控制指令给机械臂,机械臂执行抓取物品动作。 本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点: 1.本发明采用脑机接口技术,在使用者的大脑和计算机或其它电子设备之间建立 通道,不依赖于外围神经和肌肉组织,实现大脑控制外部设备;SSVEP稳态视觉诱发电位为 4 CN 111571619 A 说 明 书 3/6 页 脑机接口技术的一种,通过不同频率的视觉刺激诱发大脑产生不同频率电位,利用脑电帽 采集和处理这些脑电信号,解码出所对应的视觉刺激频率,便解码出使用者的意图,进而输 出控制命令控制机械臂运动,即实现了使用者通过大脑控制机械臂的操作; 2.本发明使用方便,无需繁琐的头皮打脑电膏;更加人性化的交互界面,能够让用 户清晰明了表达自己的意图;扩展了抓取物品的机械臂,辅助老人和残疾人在无人帮助的 情况下抓取自己所需的物品; 3.本发明系统易于扩展,实现更多功能,操作方法简单,成本低廉。 附图说明 图1是本发明的系统结构框图。 图2是本发明的整体实验流程图。 图3是本发明的电脑端程序流程图。 图4是本发明的意图表达界面刺激画面。 图5是本发明的意图表达界面反馈画面。











