
技术摘要:
本发明为基于文化算法框架的多无人飞行器协同航迹双层优化方法,在文化算法优化框架的基础上,设置具有主次级关系的两个平行进化层,两者具有相同的信念集接受函数、种群集影响函数及信念知识集更新形式,但具有相互独立存储的信念知识集数据,两者迭代模式不同:主级 全部
背景技术:
当今世界科技发展迅速,所需执行任务的复杂度与任务要求不断提升,多无人飞 行器协同航迹规划技术日受瞩目。协同航迹规划相对于单航迹规划技术更为复杂,需综合 考虑环境信息及自身性能、任务特征及协调关系、时空协同关系等一系列因素,对优化方案 设计有更高的要求。 文化算法框架由Reynolds在文献(Reynolds,R.G.An introduction to cultural algorithms[C] .Proceedings of the third annual conference on evolutionary programming.River Edge,NJ:World Scientific,1994:131-139.)中提出,具备种群微观 与信念宏观两个进化层面特征,相对于传统优化方法有更为丰富灵活的信息体系构建和更 强的优化导向作用,使此框架在多无人飞行器协同航迹规划领域的应用具有独特优势。仔 细分析文化算法框架中信念知识集更新和利用方式可以发现,虽然在该框架中直接运用特 定进化算子执行优化获得了一定程度的求解精度提升,但是对更新后知识集信息及其代际 衍生效益未做到充分利用:当环境知识更新后,其新航迹组相比已优化多代的航迹组通常 具有较高代价值,难以在优选过程中保留,导致对知识集更新的利用效率不足。
技术实现要素:
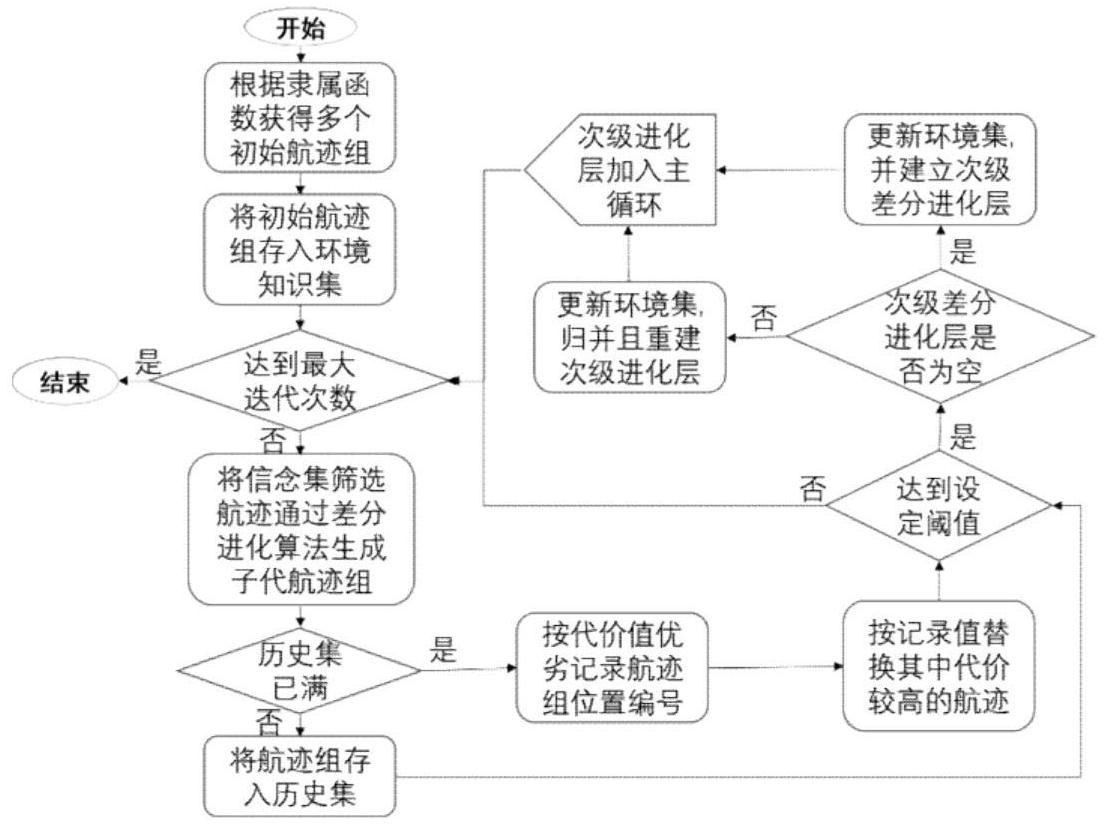
要解决的技术问题 为了克服文化算法框架中对更新后的信念知识集数据及其衍生效益利用率的不 足,本发明提供一种基于文化算法框架的多无人飞行器协同航迹双层优化方法。该方法在 文化算法框架的基础上,设置两个平行运行的进化层,在达到知识集更新阈值时以新知识 执行重建次级进化层和向主级进化层的归并,以由新知识集充分优化后的航迹集替换主层 较差解集,能同时实现对已有和更新后知识体系的充分利用。 技术方案 一种基于文化算法框架的多无人飞行器协同航迹双层优化方法,其特征在于步骤 如下: 步骤1:建立文化算法框架中的信念知识集数据库 a .针对多无人飞行器和已匹配的多任务目标点,在飞行环境中建立空间栅格,将 空间环境地形、障碍及威胁这三类因素以环境隶属度的形式表示在各栅格点上,并将任务 适配性以任务隶属度的形式表示在各栅格点上,之后以加权和的形式计算各栅格点的综合 隶属度 b.建立知识集中的环境知识数据库,由各飞行器初始位置开始,依据已建立好的 综合隶属度概率筛选邻近栅格点,筛选概率计算公式如下: 4 CN 111596683 A 说 明 书 2/5 页 其中,N为总任务数,m为下一网格面的邻近网格数,i为任务序号,j为下一网格面 的各邻近网格編号,k为当前计算的步数; 直到搜索到其任务目标点为止,依次连结各栅格点获得对应飞行器的初始航迹, 作为知识集中的环境知识数据库; c.建立知识集中的协同知识数据库,其计算公式如下: 其中,s为栅格点编号,λ和t均为任务序号; d .建立知识集中的历史知识数据库,其在优化起始时刻为空,并在迭代过程中通 过数据结果保留建立和更新; 步骤2:主级进化层的建立与迭代 采用文化算法种群集的进化算子,由已建立或更新的各信念知识集数据产生子代 航迹集,比较航迹组整体代价后筛选出代价较小的航迹组存入信念历史知识集,更新信念 知识集中的历史知识数据库,更新方式如下: 其中,M为历史集的最大容量限制,Phistory表示历史知识集,Pold表示原有的历史知 识集, 为原有知识集中的最优结果,Presult表示由进化算子产生的航迹集, 为本 代产生的最优结果,并以编号的形式对其按代价值由小到大记录顺序,Select为挑选策略; 设置阈值η,当迭代次数达到η的整数倍时,变更空间栅格的整体位置,并按上一步 骤b的方式更新环境知识数据库;后续迭代航迹组初值从前一次更新获得的各知识集数据 库中产生: 其中,Penvironment表示环境知识集衍生而来的关键航迹点集, 表示当前最优 关键航迹点集,Select2为挑选策略; 步骤3:次级进化层的建立与迭代 当迭代次数首次达到设定阈值η时,以当前更新后的环境知识数据库建立次级进 化层的知识集数据,采用与主级进化层相同的进化算子获得子代航迹数据集,并以与步骤2 中主级进化层相同的形式更新次级进化层的知识集数据;当迭代次数再次达到设定阈值η 的整数倍时,以次级进化层的数据集替换主级进化层同等数目的差解集,完成次级进化层 数据集向主级进化层知识集的归并;将次级进化层的数据集清除,以当前更新后的环境知 5 CN 111596683 A 说 明 书 3/5 页 识数据库重建次级进化层的知识集数据,继续进行迭代运算; 步骤4:当迭代到达设定最大迭代代数时,信念知识集数据中的最优数据即为多无 人飞行器最终协同航迹优化结果。 步骤2中的设定阈值η取30。 有益效果 本发明提出的一种基于文化算法框架的多无人飞行器协同航迹双层优化方法,该 方法针对多无人飞行器协同航迹规划技术复杂度和精度等要求,在文化算法框架中,引入 了主次两级平行进化层的双层优化模式,充分考虑主次两级对更新信息数据的利用程度差 异,设置合适的迭代和交互策略完成多无人飞行器协同航迹规划。相比于传统优化方法,除 具有文化算法框架本身的独特优势外,能进一步提升对已有信息体系和更新后迭代衍生效 应的利用率,具备更高的优化程度和更好的优化效益,在多无人飞行器协同航迹规划技术 领域将具有广泛的应用前景。 附图说明 图1是本发明一种基于文化算法框架的多无人飞行器协同航迹双层优化方法流程 图; 图2是本发明所涉及的文化算法框架基本结构图; 图3是本发明实施例所使用的规划区域数字高程地图; 图4是本发明实施例提供的多无人飞行器协同航迹双层优化方法最优结果示意 图; 图5是本发明实施例提供的多无人飞行器协同航迹双层优化方法每30代当前优解 示意图; 图6是本发明实施例提供的多无人飞行器协同航迹双层优化方法最终代所有航迹 组示意图。











