
技术摘要:
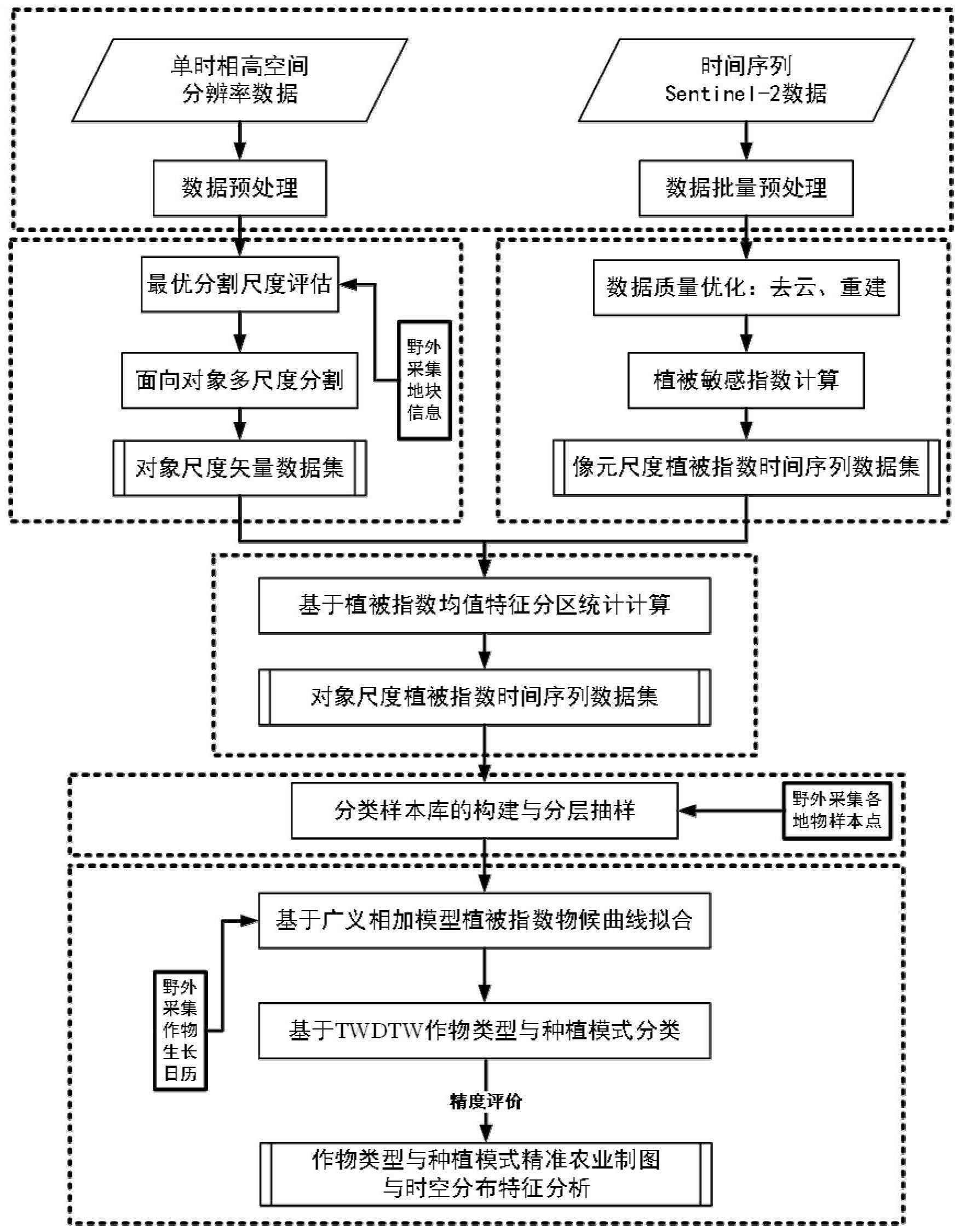
本发明公开了一种基于多源遥感数据的作物类型与种植模式识别方法,包括如下步骤:1)输入单时相高空间分辨率遥感影像并进行数据预处理;2)输入多时相Sentinel‑2遥感影像并进行数据预处理;3)基于单时相影像进行面向对象多尺度分割,生成对象尺度矢量数据集;4)基于多时 全部
背景技术:
实时准确的作物监测对于辅助作物管理与适宜性评价、作物产量预估、作物灾害 预警以及作物种植模式规划有重要意义。在区域尺度上进行精确作物制图可以为政府宏观 调控提供新的数据支撑。传统的农作物实地调查监测的方式耗时耗力,满足不了大范围、快 速及时的农情监测的需要。而随着遥感卫星技术的发展与智能化处理技术的提高,凭借遥 感技术对地表信息获取的周期性、宏观性、时效性和经济性,以遥感技术为基础的农情监测 成为未来农业发展与改革的重要方向。 当前,基于遥感技术的作物类型识别受到地面观测诸多因素的影响,如作物信息 与影像像元所含植被信息不匹配、不同作物物候期具有相似性、相同作物存在耕作与生长 周期的差异性、不同植被指数差异性与数据成本高等,精度和准确度有待提高。传统作物分 类以像元为基本单位,利用农作物的光谱信息与植被物候信息,增强不同地物、作物的差异 实现作物类型的分类。基于像元的作物识别因数据源的空间分辨率与技术等因素,产生的 混合像元和分类结果“椒盐现象”往往限制了分类精度。 随着遥感影像空间分辨率的提高与面向对象技术的产生,面向对象高分辨率耕地 信息提取的技术与方法得到广泛的探索与研究。尽管面向对象技术可以有效处理数据中 “同质异谱”与“异质同谱”现象,减少椒盐噪声,提高分类精度,但由于影像时间分辨率低, 无法详细刻画不同作物的生长物候信息。 如何在受到遥感数据时空分辨率的限制、数据质量、获取手段等因素的影响下,实 现高精度、低成本、大范围的农业作物类型和种植模式遥感监测研究,是当前农业遥感研究 和应用的前沿性和关键性问题。
技术实现要素:
本发明的目的在于提供一种能够有效进行作物类型与种植模式监测的基于多源 遥感数据的作物类型与种植模式识别方法。 为实现上述目的,本发明所提供的基于多源遥感数据的作物类型与种植模式识别 方法,包括如下步骤: 1)输入单时相高空间分辨率遥感影像并对其进行预处理; 2)输入L1C级别的多时相时间序列Sentinel-2影像(大气表观反射率产品)并对其 进行批量预处理,即利用欧空局Sen2cor插件对该影像数据集进行批量辐射校正至L2A级别 (大气底层反射率产品),并进行批量裁剪处理; 3)对于步骤1)中经过预处理的单时相高空间分辨率遥感影像,采用面向对象技术 进行地块信息提取与分割,生成对象尺度矢量数据集; 5 CN 111598019 A 说 明 书 2/10 页 4)对于步骤2)中经过批量预处理的Sentinel-2影像,先设置云含量阈值,利用云 质量文件对影像进行掩膜处理;其次,对云含量大于阈值的区域进行数据重建;最终,批量 计算植被敏感指数,生成像元尺度植被指数时间序列数据集; 5)结合步骤3)得到的对象尺度矢量数据集,对步骤4)得到的像元尺度植被指数时 间序列数据集进行分区统计,将每个对象范围内的像元尺度植被指数时间序列数据集中的 像元均值赋予给该对象范围内的所有像元,生成对象尺度植被指数时间序列数据集; 6)根据步骤5)得到的对象尺度植被指数时间序列数据集,结合野外采样各地物的 样本点,构建分类样本库并进行分层抽样; 7)利用步骤6)中构建的分类样本库,结合野外采样作物的生长日历信息,利用时 间加权动态时间规整的方法进行训练和预测,实现作物类型与种植模式的识别。 优选地,所述步骤1)中,预处理包括辐射校正、正射校正、几何校正、影像融合以及 影像裁剪。 优选地,所述步骤3)具体包括如下步骤: 3.1)在高空间分辨率遥感影像中选择典型区域进行多层多尺度分割实验,所得矢 量结果与野外采集地块数据进行叠加分析,确定面向对象多尺度分割最优尺度范围;叠加 分析的主要原理是将调查结果与分割结果进行栅格化,统计调查结果内的像元数量落至分 割结果内的个数占总像元个数的比例; 3.2)将步骤3.1)得到的最优尺度范围端点作为尺度评估的起始尺度与终止尺度, 利用最优尺度评估工具进行最优尺度参数估计得到最优分割尺度; 3.3)根据步骤3.2)得到的最优分割尺度,基于eCognition Developer平台,利用 多尺度分割算法对整个高空间分辨率遥感影像进行面向对象多尺度分割,生成对象尺度矢 量数据集。 优选地,所述步骤3.2)中,利用最优尺度评估工具ESP2计算场景内的局部方差来 进行最优尺度参数估计,局部方差变化率峰值所对应的分割尺度即为最优分割尺度; 优选地,所述步骤3.3)中,所述多尺度分割算法的参数包括对象异质性指标,所述 对象异质性指标包括光谱异质性指标和形状异质性指标,其计算公式如下: 光谱异质性指标hcolor: 式中:c为总波段数,Wc为波段权重值,δc为波段光谱值的标准差; 形状异质性指标hshape: hshape=Wsmooth*hsmooth Wcompactness*hcompactness 式中:Wsmooth为光滑度权重,Wcompactness为紧致度权重,Wsmooth Wcompactness=1,hsmooth 为光滑度异质性,hcompactness为紧致度异质性,E为分割后对象的周长,B为对象在水平方向上 6 CN 111598019 A 说 明 书 3/10 页 外接矩形的最短周长,N为对象内像元的总数; 对象异质性指标d: d=Wcolor*hcolor Wshape*hshape 式中,Wcolor为光谱权重,Wshape为形状权重,Wcolor Wshape=1;hcolor为光谱异质性指 标,hshape为形状异质性指标。 一般情况下,根据不同的研究区地形复杂度,地块规整度等特征的不同,各波段权 重均设置为相等,光谱权重、形状权重、紧致度权重及光滑度权重的取值范围均为0~1之 间,对象异质性指标的取值标准依据多次试验对比结果,取分割效果较为准确的参数组合。 优选地,所述步骤4)具体包括如下步骤: 4.1)设置云含量阈值为20%,利用L2A级别影像中的云质量文件,按照如下公式对 影像进行掩膜处理: 式中,F(i,j)为影像像元值,NAN为空值,Cloud(i,j)为云质量文件中的像元值的 百分比,i与j为对应像元的行列号; 4.2)基于MATLAB程序,对云含量大于20%,即像元值为NAN值的像元按照如下公式 进行重建: Fk(i,j)=(Fk-1(i,j) Fk 1(i,j))/2 式中,Fk(i,j)为第k景影像重建后的像元值,Fk-1(i,j)为第k-1景影像的像元值, Fk 1(i,j)为第k 1景影像的像元值,i与j为对应像元的行列号;当Fk-1(i,j)为NAN时,Fk-1(i, j)取时间轴左侧最邻近的像元值为非NAN时间点对应的影像像元值;当Fk 1(i,j)为NAN时, Fk 1(i,j)取时间轴右侧最邻近的像元值为非NAN时间点对应的影像像元值; 4.3)基于步骤4.2)重建后的影像,利用植被敏感计算公式,计算每个像元对应的 植被指数值,获得由每个像元植被指数值构成的指数影像,得到像元尺度植被指数时间序 列数据集;所述的植被指数包含NDVI与EVI,其计算公式如下: NDVI=(Nir-Red)/(Nir Red) EVI=2.5*(Nir-Red)/(Nir 6*Red-7.5*Blue 1) 式中,Nir为近红波段地表反射率值,Red为红波段地表反射率值,Blue为蓝波段地 表反射率值。 优选地,所述步骤5)中,按照如下公式将每一对象范围内的全部植被指数时间序 列数据集中的像元的均值赋予到该对象范围内的全部像元,生成对象尺度植被指数时间序 列数据集: 式中,Hg(i ,j)为对象内第g个像元的植被指数值,q为对象内植被指数像元的个 数,i与j分别代表对象范围内植被指数像元的行列号。 7 CN 111598019 A 说 明 书 4/10 页 优选地,所述步骤6)中,结合野外采样各地物的样本点,构建分类样本库,先将总 体样本按其类型进行分层,然后在每层中随机抽取样本,并将抽取的样本按一定比例分为 训练样本与验证样本。其中训练样本与验证样本的抽取比例优选为2:1。 优选地,所述步骤7)具体包含以下步骤: 7.1)利用广义相加模型对各地物的植被指数物候曲线(如NDVI曲线、EVI曲线)进 行拟合; 7.2)将步骤7.1)中训练样本的拟合曲线应用至时间加权动态时间规整算法中,进 行作物类型与种植模式的识别; 7.3)利用步骤6)中的分层抽样后的验证样本,对步骤7.2)的分类结果进行精度验 证; 7.4)如精度验证结果如果与期望精度不符,则返回步骤6)重新进行分层抽样,直 至与期望精度相符,最终完成作物类型与种植模式的识别。 优选地,所述步骤7.3)中,精度验证的指标选择总体准确率(Overall accuracy)、 精确率(Precision)、召回率(Recall)以及F-score四个指标。 与现有技术相比,本发明的有益效果在于:本发明基于单时相高空间分辨率数据 与多时相时间序列Sentinel-2数据,突破了单一数据源限制,减少了农田因光谱异质性产 生的提取误差,既满足了遥感作物监测所需要的生长规律信息,又实现了农田地块中作物 类型的精准识别;同时结合时间序列分析与面向对象分割技术,以具有物候信息的时间序 列对象为最小分类单元,利用加权动态时间规整的方法实现作物类型与种植模式的识别, 解决了传统分别基于像元尺度与基于对象尺度进行相关监测存在的瓶颈,从时序对象角度 降低了数据计算维度,优化了精准农业监测手段,提高了作物类型和种植模式识别精度。 附图说明 图1为本发明实施例中所提供的作物类型与种植模式识别的流程示意图。 图2为本发明实施例中输入数据成像时间示意图。 图3为本发明实施例中研究区A最优尺度范围对比图。 图4为本发明实施例中研究区B最优尺度范围对比图。 图5为本发明实施例中研究区A最优尺度计算(ESP2)示意图。 图6为本发明实施例中研究区B最优尺度计算(ESP2)示意图。 图7为本发明实施例中研究区A主要作物生长日历示意图。 图8为本发明实施例中研究区B主要作物生长日历示意图。 图9为本发明实施例中研究区A主要地类NDVI拟合曲线示意图。 图10为本发明实施例中研究区B主要地类NDVI拟合曲线示意图。 图11为本发明实施例中研究区A作物类型与种植模式分类结果示意图,原图为彩 色,由于专利附图限制改成了灰度图片,原始颜色名称在图例中进行了标注。 图12为本发明实施例中研究区B作物类型与种植模式分类结果示意图,原图为彩 色,由于专利附图限制改成了灰度图片,原始颜色名称在图例中进行了标注。 8 CN 111598019 A 说 明 书 5/10 页











