
技术摘要:
本发明提供了一种控制方法和控制器,所述方法包括:通过采集永磁同步电机的转子位置、电机转速、交轴电流、直轴电流和三路桥臂的脉宽调制占空比,根据电机转速对转子位置进行补偿,进而根据补偿后的转子位置信息计算三相电流,最终使用三相电流和PWM值作为母线电流的计 全部
背景技术:
近年来清洁能源汽车越来越受到大家的关注,其中纯电动汽车的动力主要来源于 电机,而永磁同步电机因功率密度大、效率高等特点得到广泛应用。对于永磁同步电机驱动 控制器,需要母线电流对当前控制器的状态进行监控,故需要得到当前控制器的母线电流。 通过软件去估算母线电流,可以节省成本提高系统可靠性。目前通过软件去估算 母线电流的方法是:在一个开关周期T内,用调整系数λ对三相电流ia,ib,ic在母线中的作 用时间ta,tb,tc进行调整,得到ta1=λta((k-1)T) (1-λ)ta(kT);tb1=λtb((k-1)T) (1- λ)tb(kT);tc1=λtc((k-1)T) (1-λ)tc(kT),进而估算的母线电流为:(ta1*ia tb1*ib tc1*ic)与周期T的比值。因为ta1/T、tb1/T、tc1/T分别为三路桥臂的PWM(Pulse Width Modulation,脉宽调制)占空比,故该方法实际是对PWM占空比进行补偿。根据该方法,补偿 值最大只能是前后一个周期,对于某些工况,该方法容易受到限制,不够灵活,使工程人员 不能随时掌握母线电流值,进而导致对电机的控制难度加大。
技术实现要素:
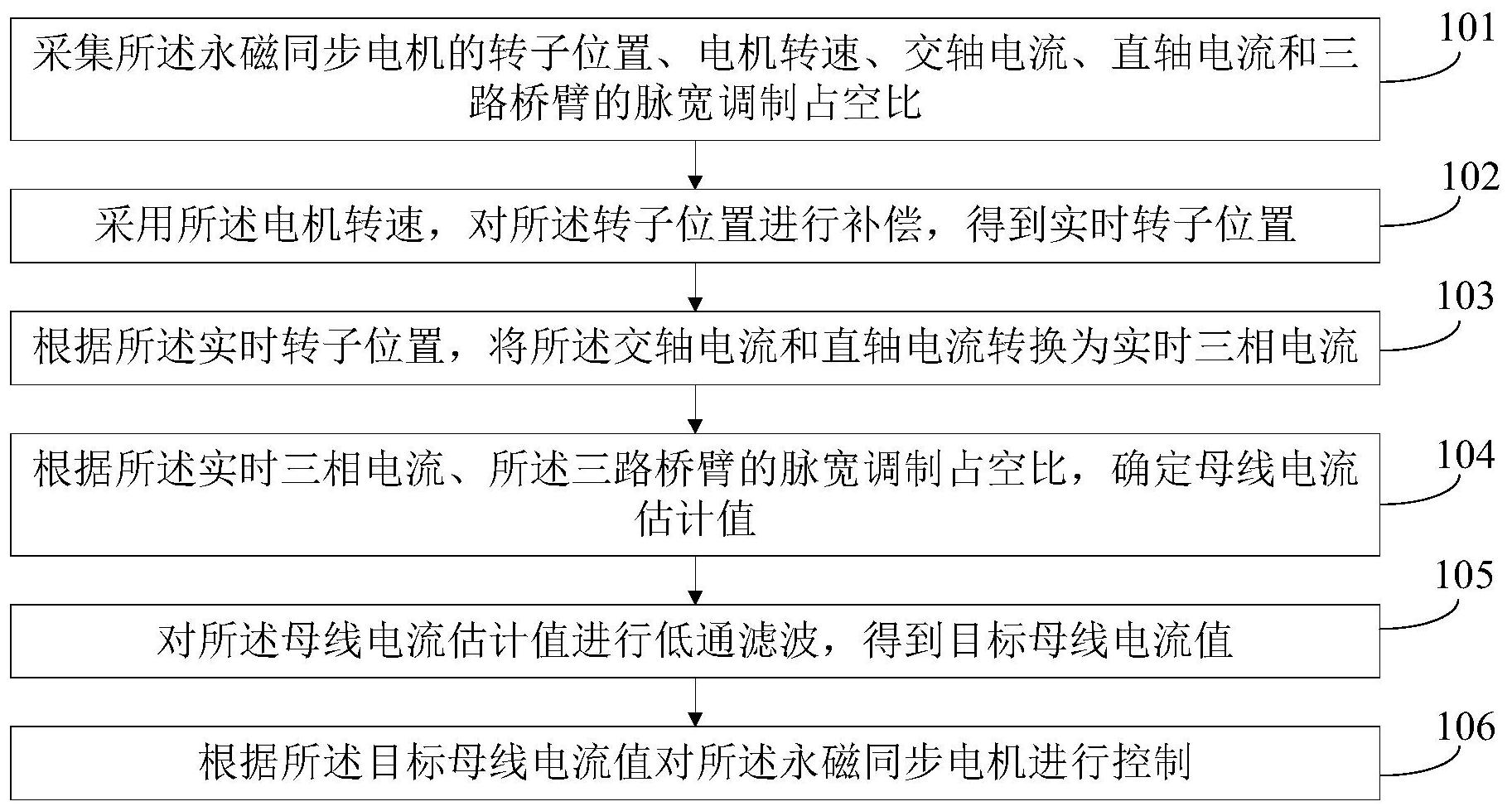
本发明提出一种控制方法,以解决现有的母线电流估算控制方法容易受工况限 制,导致对电机的控制难度加大的问题。 为达到上述目的,本发明的技术方案是这样实现的: 一种控制方法,所述方法应用于永磁同步电机的控制器,所述方法包括: 采集所述永磁同步电机的转子位置、电机转速、交轴电流、直轴电流和三路桥臂的 脉宽调制占空比; 采用所述电机转速,对所述转子位置进行补偿,得到实时转子位置; 根据所述实时转子位置,将所述交轴电流和直轴电流转换为实时三相电流; 根据所述实时三相电流、所述三路桥臂的脉宽调制占空比,确定母线电流估计值; 对所述母线电流估计值进行低通滤波,得到目标母线电流值。 根据所述目标母线电流值对所述永磁同步电机进行控制。 进一步的,所述转子位置为转子旋转角度,所述采用所述电机转速,对所述转子位 置进行补偿,得到实时转子位置,包括: 采用所述电机转速,从预设的转子位置信息补偿表中查询所述电机转速对应的转 子旋转角度补偿值;所述预设的转子位置信息补偿表中记录有所述电机转速与所述转子旋 转角度补偿值的对应关系; 根据所述转子旋转角度补偿值,对所述转子位置进行补偿,得到实时转子位置。 进一步的,所述预设转子位置信息补偿表通过以下步骤获得: 在所述永磁同步电机的转速范围内选取多个测试电机转速; 4 CN 111614288 A 说 明 书 2/11 页 针对每个测试电机转速,确定所述测试电机转速对应的母线电流实际值和母线电 流测试值; 根据所述母线电流实际值和母线电流测试值确定所述预设转子位置信息补偿表。 进一步的,所述根据所述实际母线电流值和所述测试母线电流值确定所述预设转 子位置信息补偿表,包括: 计算每个测试电机转速对应的所述母线电流实际值和母线电流测试值的差值; 根据所述差值确定每个测试电机转速对应的所述测试转子位置的补偿值。 进一步的,所述根据所述实时转子位置,将所述交轴电流和直轴电流转换为实时 三相电流,包括: 根据所述实时转子位置,将所述交轴电流和所述直轴电流变换为相对定子静止的 两相电流; 将所述相对定子静止的两相电流变换为实时三相电流。 进一步的,所述根据所述实时三相电流、所述三路桥臂的脉宽调制占空比,确定母 线电流估计值,包括: 对于每路桥臂,计算所述实时三相电流中所述桥臂对应的电流、所述桥臂对应的 脉宽调制占空比的乘积; 计算所述三路桥臂对应的所述乘积之和,得到估算的母线电流值。 相对于现有技术,本发明所述的控制方法具有以下优势: 本发明所述的控制方法,通过采集永磁同步电机的转子位置、电机转速、交轴电 流、直轴电流和三路桥臂的脉宽调制占空比,根据电机转速对转子位置进行补偿,进而根据 补偿后的转子位置信息计算三相电流,最终使用三相电流和PWM值作为母线电流的计算输 入,确定母线电流估计值,对母线电流进行低通滤波后,得到目标母线电流值,从而根据目 标母线电流值对永磁同步电机进行控制。上述方法可对三相电流进行任意位置的补偿,在 全工况内,无论电机转速为高速和低速,都有较高的估算精度,这使得工程人员可以随时掌 握母线电流,进而实现对永磁同步电机精准的控制。 本发明的另一目的在于提出控制器,以解决现有的母线电流估算方法容易受工况 限制,导致对电机的控制难度加大的问题。 为达到上述目的,本发明的技术方案是这样实现的: 一种控制器,所述控制器包括: 采集模块,用于采集所述永磁同步电机的转子位置、电机转速、交轴电流、直轴电 流和三路桥臂的脉宽调制占空比; 实时转子位置获取模块,用于采用所述电机转速对所述转子位置进行补偿,得到 实时转子位置; 实时三相电流变换模块,用于根据所述实时转子位置,将所述交轴电流和直轴电 流转换为实时三相电流; 母线电流估算模块,用于根据所述实时三相电流、所述三路桥臂的脉宽调制占空 比,确定母线电流估计值; 低通滤波模块,用于对所述母线电流估计值进行低通滤波,得到目标母线电流值。 控制模块,用于根据所述目标母线电流值对所述永磁同步电机进行控制。 5 CN 111614288 A 说 明 书 3/11 页 进一步的,所述转子位置为转子旋转角度,所述实时转子位置获取模块,包括: 查询子模块,用于采用所述电机转速,从预设的转子位置信息补偿表中查询所述 电机转速对应的转子旋转角度补偿值;所述预设的转子位置信息补偿表中记录有所述电机 转速与所述转子旋转角度补偿值的对应关系; 补偿子模块,用于根据所述转子旋转角度补偿值,对所述转子位置进行补偿,得到 实时转子位置。 进一步的,所述控制器还包括: 转速选取模块,用于在所述永磁同步电机的转速范围内选取多个测试电机转速; 母线电流确定模块,用于针对每个测试电机转速,确定所述测试电机转速对应的 母线电流实际值和母线电流测试值; 补偿值确定模块,用于根据所述测试电机转速对应的所述母线电流实际值和所述 母线电流测试值确定对应的转子旋转角度补偿值; 添加模块,用于将所述转子旋转角度补偿值与所述测试电机转速按照对应关系添 加至转子位置信息补偿表中。 进一步的,所述补偿值确定模块,包括: 差值计算子模块,用于计算每个测试电机转速对应的所述母线电流实际值和母线 电流测试值的差值; 补偿值确定子模块,用于根据所述差值确定每个测试电机转速对应的所述测试转 子位置的补偿值。 进一步的,所述实时三相电流变换模块,包括: 第一变换子模块,用于根据所述实时转子位置,将所述交轴电流和所述直轴电流 变换为相对定子静止的两相电流; 第二变换子模块,用于将所述相对定子静止的两相电流变换为实时三相电流。 进一步的,所述母线电流估算模块,包括: 乘积计算子模块,用于对于每路桥臂,计算所述实时三相电流中所述桥臂对应的 电流、所述桥臂对应的脉宽调制占空比的乘积; 母线电流估算子模块,用于计算所述三路桥臂对应的所述乘积之和,得到估算的 母线电流值。 所述控制器与上述控制方法相对于现有技术所具有的优势相同,在此不再赘述。 附图说明 构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实 施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1示出了本发明实施例中所述的控制方法的流程图之一; 图2示出了本发明实施例中所述的控制方法的流程图之二; 图3示出了本发明实施例中所述的三相全桥逆变器电路的示意图; 图4示出了本发明实施例中所述的电压空间矢量关系示意图; 图5示出了本发明实施例中所述的控制器的结构框图之一; 图6示出了本发明实施例中所述的控制器的结构框图之二。 6 CN 111614288 A 说 明 书 4/11 页











