
技术摘要:
本发明公开一种无人配送机器人,包括带有若干个收纳箱的储物柜,所述储物柜下部设置有驱动座本体,所述驱动座本体下部设置有行走底座,所述驱动座本体与所述储物柜之间还设置有升降机构,所述升降机构驱动升降所述储物柜;所述无人配送机器人还包括设置在所述行走底座 全部
背景技术:
现有技术中,目前随着技术的发展,出现了诸如无人配送车的配送机器人,配送机 器人可自动移动到待收货用户的指定位置,以便待收货用户无需到固定购物场所就可以进 行购物,从而提高了用户的购物体验。然后待收货用户通常采用扫描二维码、利用系统侧提 供的动态取货码、NFC(Near Field Communication,近场通信)验证等方式进行收货认证。 因此现有技术中,专利申请号:CN201811060979.6,专利名称:一种配送机器人;公 开了:一种配送机器人,包括:壳体、储物箱体、行走装置、控制装置和箱体移动装置,储物箱 体安装在所述壳体上,行走装置设置在壳体底部,控制装置安装在壳体内,箱体移动装置一 端固定在储物箱体上,箱体移动装置另一端固定在壳体上;控制装置分别与行走装置、箱体 移动装置电连接;通过控制装置根据接收的储物箱体的开关信息生成移动指令以及根据接 收的配送信息生成行走指令,箱体移动装置根据移动指令控制储物箱体的开合,行走装置 根据所述行走指令移动,使壳体移动到配送信息中的地址的技术方案。 但是现有技术中的配送机器人,配送区域受限,配送网络相对单一,一般是发货点 到收货点的一对一的配送模式。无法在配送机器人之间进行货物的传递,更不能将配送机 器人形成传递网络。进而提升物流的派送半径。
技术实现要素:
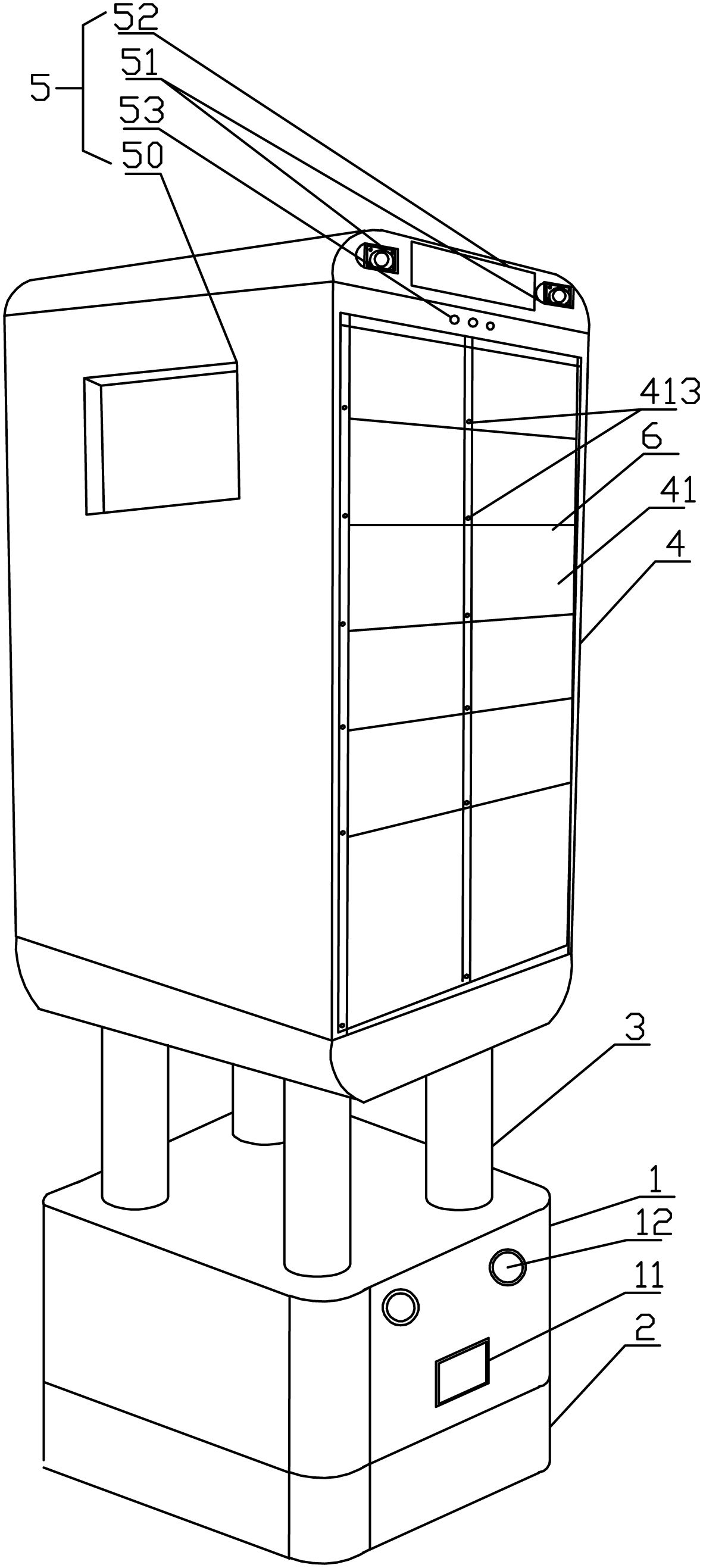
本发明克服了现有技术的不足,提供一种无人配送机器人及其配送方法,能够实 现交互配送和物流传递,拓展配送网路和配送密度,提升配送机器人的利用率。 为达到上述目的,本发明采用的技术方案为:一种无人配送机器人,包括带有若干 个收纳箱的储物柜,所述储物柜下部设置有驱动座本体,所述驱动座本体下部设置有行走 底座,所述驱动座本体与所述储物柜之间还设置有升降机构,所述升降机构驱动升降所述 储物柜;所述无人配送机器人还包括设置在所述行走底座或/和所述储物柜上的与所述驱 动座本体电连接的交互系统。 本发明一个较佳实施例中,驱动座本体的前侧或/和后侧上设置有能内外伸缩的 对接杆,和与相邻的驱动座本体上的对接杆对应插接的插槽;所述驱动座本体的前侧或/和 后侧上设置有电磁机构本体。 具体的,所述升降机构包括若干个设置在所述储物柜和所述驱动座本体之间的升 降杆,以及驱动所述升降杆上下升降的驱动装置。 本发明一个较佳实施例中,所述收纳箱包括设置在所述储物柜上的收纳槽,以及 卷收设置在所述收纳槽上的卷帘门,所述收纳槽和所述卷帘门构成封闭的收纳腔;所述收 纳槽的至少一端上设置有进出货口,所述进出货口上设置有卷帘门;所述卷帘门的一端卷 4 CN 111599101 A 说 明 书 2/6 页 收在所述进出货口一侧上,所述卷帘门的另一端能相对所述进出货口的另一侧往复开合; 或,所述收纳箱包括设置在所述储物柜上的收纳槽,以及活动设置在所述收纳槽上的铰链 门,所述收纳槽和所述铰链门构成密闭封闭的收纳腔;铰链门包括设置在进出货口上的轨 道框,轨道框包括设置在进出货口两侧上的倒L形导轨,一对倒L形导轨上活动设置有由若 干个铰链铰接的门帘,进出货口上设置有与门帘或铰链衔接的平衡轴系统;平衡轴系统与 驱动器驱动连接,驱动器驱动平衡轴系统带动通过铰链铰接的门帘顺着一对倒L形导轨相 对进出货口上下位移进行往复开合。 本发明一个较佳实施例中,所述收纳槽穿设在所述储物柜内,所述收纳槽两端设 置有与储物柜的正反两面的柜面连通的进出货口,所述进出货口上部设置有所述卷帘门 或/和铰链门。 本发明一个较佳实施例中,交互系统包括设置在所述驱动座本体或/和储物柜上 的触摸屏、摄像机构、显示屏、距离检测机构的一种或多种。 本发明一个较佳实施例中,收纳槽内设置有用于支撑和传送货物的传送台板;所 述传送台板包括设置在所述收纳槽内的驱动架本体,所述驱动架本体上枢转设置有若干个 收纳腔,所述收纳腔内枢转设置有若干个支撑货物的传送轮。 本发明一个较佳实施例中,卷帘门包括设置在所述进出货口上部的内置式卷轴, 所述进出货口两侧设置有轨道框,所述内置式卷轴上卷收有卷帘,所述卷帘的两侧分别滑 动嵌设在所述进出货口两侧的轨道框内,所述卷帘的一端设置有与内置式卷轴连接的固定 端,所述卷帘的另一端设置有相对所述内置式卷轴能上下卷收的卷收端;轨道框两侧分别 设置有内嵌式的拉簧,所述拉簧的一端与所述轨道框底端连接,所述拉簧的另一端与卷帘 的卷收端连接。 所述轨道框内的一对L形导轨内的两端分别设置有拉簧,所述拉簧的一端与轨道 框连接,拉簧的另一端与门帘的两端分别连接。 本发明一个较佳实施例中,无人配送机器人的配送方法,包括: a.不同区域的无人配送机器人接收送货信息中拟定的送货轨迹上的物料传送站点信 息; b.邻近物料传送站点的无人配送机器人接收送货信息,根据送货信息中的传送路径和 自身载货情况判断是否接收命令,接收送货信息的无人配送机器人案送货轨迹的时间节点 和空间节点到达指定物料传送站点; c.需要进行物料传送的至少两个无人配送机器人进行物料的转移,驱动传送台板,通 过传送台板实现物料的传送。 步骤c中,根据实际情况,接收货物的无人配送机器人的储物柜中空置的收纳槽是 否与传送货的物无人配送机器人的放置货物的收纳槽在同一高度;方法一,满足同一高度, 接收货物的无人配送机器人与传送货的物无人配送机器人进行对接;方法二,不满足同一 高度,接收货物的无人配送机器人或/和传送货的物无人配送机器人进行高度调节,使得无 人配送机器人的储物柜中空置的收纳槽与传送货的物无人配送机器人的放置货物的收纳 槽在同一高度,接收货物的无人配送机器人与传送货的物无人配送机器人进行对接。 根据上述实施例所揭露的无人配送机器人及其配送方法,达到的有益效果是: 一种无人配送机器人及其配送方法,能够实现交互配送和物流传递,拓展配送网路和 5 CN 111599101 A 说 明 书 3/6 页 配送密度,提升配送机器人的利用率。 1、通过储物柜和驱动座本体之间设置升降机构,能够调整储物柜的高度,便于后 期两个无人配送机器人之间传送货物的收纳槽内的传送台板位于同一传送高度。 2、通过设置有卷帘门或铰链门,提升了储物柜中收纳箱开合的安全性能,也节省 了设置的空间。进而提升了无人配送机器人对接时能保证两个对接的无人配送机器人之间 的对接间距相对外翻盖结构的相对距离的最小化。 附图说明 下面结合附图和实施例对本发明进一步说明; 图1为根据本发明所揭露的无人配送机器人的结构示意图(升降机构抬升时的结构示 意图); 图2为根据本发明所揭露的无人配送机器人的结构示意图(升降机构未抬升时的结构 示意图); 图3为根据本发明所揭露的两个无人配送机器人对接时的结构示意图; 图4为根据本发明所揭露的无人配送机器人中万向轮台板的结构示意图; 图5为根据本发明所揭露的无人配送机器人中卷帘门的结构示意图; 图6为根据本发明所揭露的无人配送机器人中卷帘铰链门的结构示意图; 1-驱动座本体,11-电磁机构本体,12-对接杆,13-插槽,2-行走底座,3-升降机构,4-储 物柜,41-收纳箱,413-对接检测机构,42-传送台板,421-驱动架本体,423-横向转动盘, 424-收纳腔,425-传送轮,5-交互系统,50-触摸屏,51-摄像机构,52-显示屏,53-距离检测 机构,6-卷帘门,61-内置式卷轴,62-轨道框,63-定位气缸,64-卷帘,7-铰链门,71-铰链, 72-门帘,73-平衡轴系统,74-驱动器,75-导轨。











