
技术摘要:
本申请提出了一种基于时序差分干涉合成孔径雷达数据的二维解缠方法,包括以下步骤:生成时序SAR影像数据集;对时序SAR影像进行配准;提取配准后的时序SAR影像数据集的高相干点;对时序配准后SAR影像做差分干涉处理;对上述干涉相位图进行最邻近插值;对每一幅插值差分 全部
背景技术:
合成孔径雷达差分干涉测量技术(DInSAR)是一种极具潜力的微波遥感技术,其在 形变检测方面可以获得厘米级甚至毫米级的地表形变,并取得了成功应用,但其测量精度 仍受到许多因素的制约:如影像配准误差、地形复杂或有较多植被覆盖区域的去相干噪声、 轨道误差、复杂地区的相位解缠误差、大气延迟误差、外部数字高程模型不准引入的地形相 位残差等。在这些误差中,由于相位解缠误差受制于相位解缠方法的选取,不同的解缠方法 将引入的解缠误差将极大的影响最终监测结果精度。 现有的相位解缠方法主要为基于二维规则网格的相位解缠,具体有以下几类,一 类是路径跟踪法,一类是最小范数法,一类是网络算法,即图像自身特性的矫正方法和基于 外部数据的矫正方法。其中路径跟踪法的代表为枝切线法和依据其发展而来的加权枝切线 法,最早由Goldstein于1986年提出,主要原理是通过识别解缠过程中的残差点,建立不同 的枝切线以限制积分路径,减小噪声造成的误差传播。最小范数法将相位解缠问题归结于 求取最下范数的数学问题,具有代表性的是最小二乘和加权最小二乘法,主要原理是以解 缠相位和缠绕相位之差的平方和最小为目的求取解缠相位估计值。网络算法是针对上面两 种算法的不足之处提出的,以上两种算法存在两个不足之处,其一是不能兼顾算法准确性 和计算复杂度,其二是对于噪声污染严重的干涉图,都不能很好的进行相位解缠。网络算法 最要由Constantini提出,经过Flynn与Callaro等人的改进,对于上述两种算法的不足进行 了较大改进,其只要思想是建立网络费用目标函数,将相位解缠转化为求解最小费用流的 网络优化问题,解缠效果较为精确。 当干涉相位误差较小时,上述算法得到的解缠结果较为准确,但当干涉相位误差 较大时,由于每一个像素点上的误差值有大有小,若将所有像素点都进行解缠,则会造成相 位误差在二维平面内的扩散,对于时序差分干涉技术来说,这样的误差扩散会影响最终形 变监测的精度,因此传统的相位解缠方法将不再适用于此。
技术实现要素:
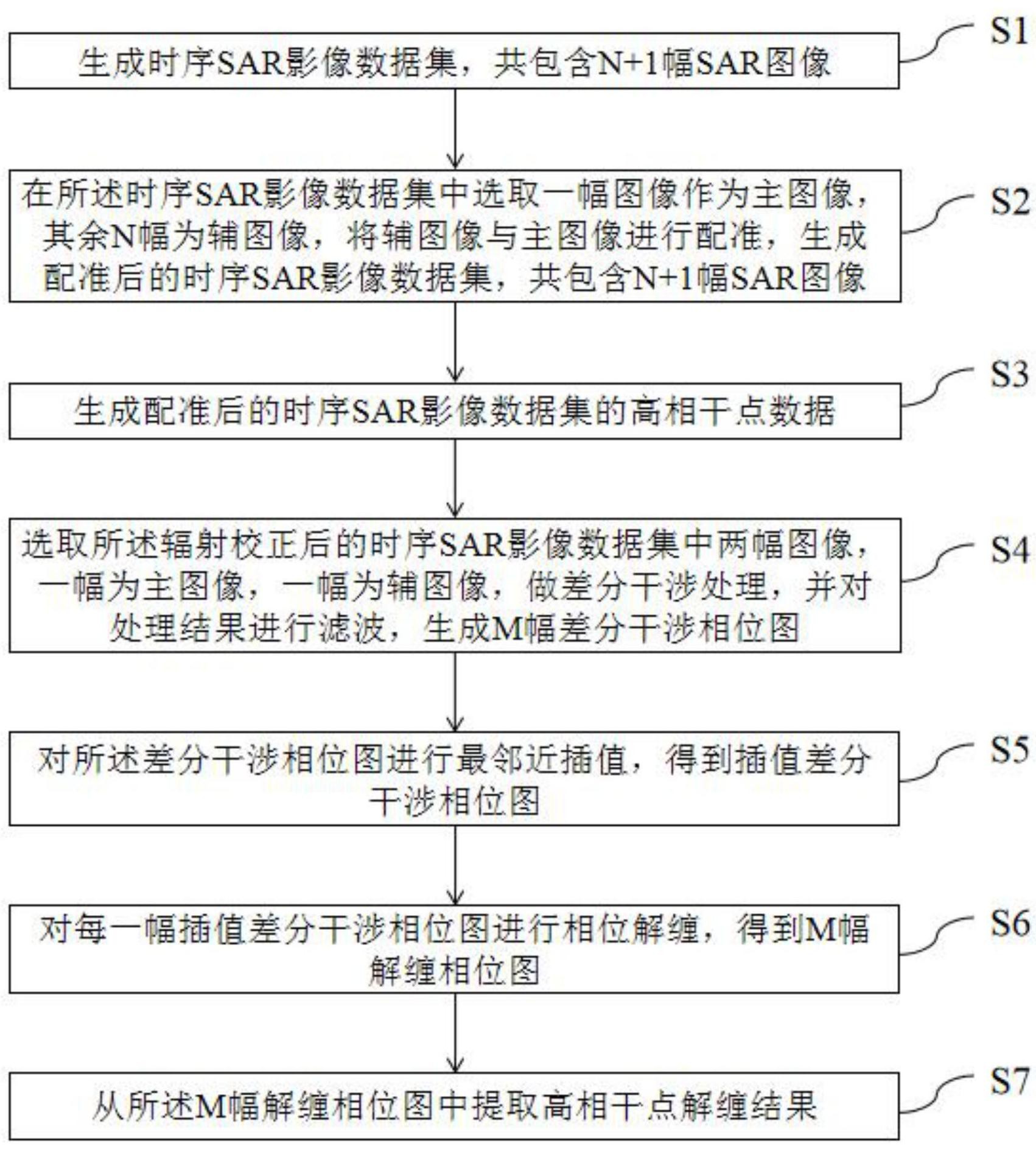
本申请提供了一种基于时序差分干涉合成孔径雷达数据的二维解缠方法,结合传 统网格相位解缠的优势和时序差分干涉技术中的高相干点特性,解决了传统相位解缠方法 不适用于干涉相位误差较大数据的困难。 本申请解决上述技术问题所采取的技术方案如下: 一种基于时序差分干涉合成孔径雷达数据的二维解缠方法,所述方法包括以下步 骤: S1:生成时序SAR影像数据集,共包含N 1幅SAR图像; 4 CN 111598929 A 说 明 书 2/7 页 S2:在所述时序SAR影像数据集中选取一幅图像作为主图像,其余N幅为辅图像,将 辅图像与主图像进行配准,生成配准后的时序SAR影像数据集,共包含N 1幅SAR图像; S3:生成配准后的时序SAR影像数据集的高相干点数据,包括: S301:对配准后的时序SAR影像数据集,采用相对辐射矫正法对N 1幅SAR图像进行 辐射校正,生成辐射校正后的时序SAR影像数据集; S302:利用振幅信息的双重阈值法从辐射校正后的时序SAR影像数据集中提取高 相干点数据,共包含K个高相干点; S4:选取所述辐射校正后的时序SAR影像数据集中两幅图像,一幅为主图像,一幅 为辅图像,做差分干涉处理,并对处理结果进行滤波,生成M幅差分干涉相位图; S5:对所述差分干涉相位图进行最邻近插值,得到插值差分干涉相位图,包括: S501:令m=1; S502:提取第m幅差分干涉图中K个高相干点的差分干涉相位序列,记为 提取高 相干点数据,生成方位向坐标序列NAm和距离向坐标序列NRm; S503:提取差分干涉图中的每一个像素点在差分干涉图中的位置,方位向坐标值 na,距离向坐标值nr; S504:利用最邻近插值方法计算所述像素点插值后的干涉相位值; S505:对所述差分干涉相位图中的每一个像素点都计算了插值后的干涉相位值 后,将新的干涉相位图作为第m幅插值差分干涉相位图,令m=m 1; S506:若m≤M,执行步骤S502,否则执行步骤S6; S6:对每一幅插值差分干涉相位图进行相位解缠,得到M幅解缠相位图; S7:从所述M幅解缠相位图中提取高相干点解缠结果。 可选的,所述的高相干点数据包括高相干点在SAR图像的方位向坐标值、在SAR图 像的距离向坐标值。 可选的,S5中所述最近邻插值方法包括以下步骤: 利用平面距离公式计算所述像素点与每一个高相干点的距离,找到最短距离对应 的高相干的差分干涉相位,并用此相位值取代原差分干涉图中所述像素点相位值,所述的 平面距离计算公式如下; 其中,dj表示所选像素点与第j个高相干点之间的平面距离, 表示取平方根操 作,x表示所选像素点在SAR图像的方位向坐标值,xj表示第j个高相干点在SAR图像的方位 向坐标值,ρa表示SAR图像的方位向分辨率,y表示所选像素点在SAR图像的距离向坐标值,yj 表示第j个高相干点在SAR图像的距离向坐标值,ρr表示SAR图像的距离向分辨率。 可选的,S7中所述高相干点解缠结果包括高相干点在SAR图像的方位向坐标值、在 SAR图像的距离向坐标值,高相干点的M个解缠相位。 可选的,S6中所述对每一幅插值差分干涉相位图进行相位解缠,得到M幅解缠相位 图,包括: S601:从M幅插值差分干涉相位图内选取一个未解缠的差分干涉相位图; S602:利用最小费用流解缠方法,对差分干涉相位图进行解缠,生成解缠差分干涉 5 CN 111598929 A 说 明 书 3/7 页 相位图: S603:判断是否将所有的差分干涉相位图都进行了解缠,若是,执行步骤S7,否则, 继续执行步骤S6。 本申请提供的技术方案包括以下有益技术效果: 本申请提出了一种基于时序差分干涉合成孔径雷达数据的二维解缠方法,包括以 下步骤:生成时序SAR影像数据集;对时序SAR影像进行配准;提取配准后的时序SAR影像数 据集的高相干点;对时序配准后SAR影像做差分干涉处理;对上述干涉相位图进行最邻近插 值;对每一幅插值差分干涉相位图进行相位解缠;提取高相干点解缠结果。本申请仅利用差 分干涉图中高相干点上的相位数据,而不是使用所有相位,剔除了相位误差较大的点对整 体解缠过程的干扰,从而降低了相位解缠误差;依靠合成孔径雷达影像数据自身信息,克服 了现有技术中需要先验模型支持的不足,使得本申请中的方法具有较高的可行性和适用 性,采用最邻近插值方法将稀疏网格数据与规则网格数据相联系,使得原有规则网格解缠 方法适用于稀疏网格,仅需对原有数据处理流程做微小改动即可,使得本方法具有较高的 集成度。本申请采用基于时序差分干涉合成孔径雷达数据的二维解缠方法,能够有效抑制 现有时序数据解缠误差的干扰,从而提高相位解缠精度。 附图说明 为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简 单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下, 还可以根据这些附图获得其他的附图。 图1为本实施例提供的实现流程图; 图2为所用无噪声差分干涉相位图; 图3为所用有噪声差分干涉相位图; 图4为插值差分干涉相位图; 图5为解缠相位结果误差对比图; 图6为重复试验解缠相位结果误差均值对比图。











