
技术摘要:
本发明公开了一种水下清淤车及其搅吸头离底距离检测方法,水下清淤车包括清淤车车体,其上表面铰接举升臂,举升臂另一端铰接连接段,连接段另一端固接摆臂,摆臂另一端固接折臂,折臂另一端连接搅吸头,清淤车车体上表面设举升油缸安装座,其上铰接举升油缸,举升油缸 全部
背景技术:
水下清淤车的搅吸头离水底沉积物表层的垂直距离,对于清淤厚度和清淤浓度起 到关键作用。目前,水下清淤车的搅吸头离水底沉积物表层的垂直距离的检测方法,主要是 在陆地上测量几组搅吸头离车底的垂直距离作为估算值,没有将清淤车在水底不同沉积物 上的压陷量考虑进去,导致清淤厚度和清淤浓度与实际工况相差比较大。
技术实现要素:
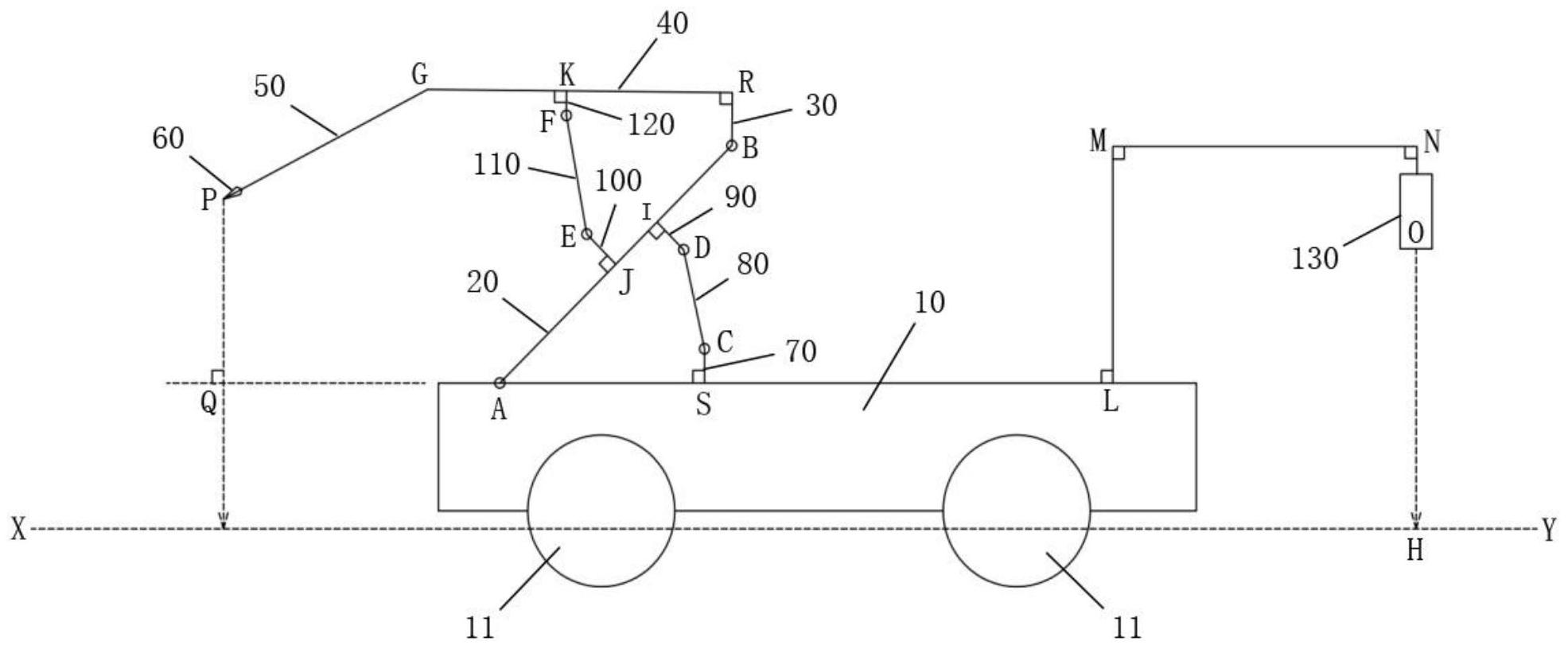
本发明的主要目的在于提供一种水下清淤车及其搅吸头离底距离检测方法,以解 决现有技术中的检测方法未考虑清淤车在水底沉积物上的压陷量,导致搅吸头的离底距离 测量不准确的问题。 为了实现上述目的,根据本发明的一个方面,提供了一种水下清淤车,包括清淤车 车体,清淤车车体上表面铰接有举升臂,举升臂的另一端铰接一连接段,连接段的另一端固 接一摆臂,摆臂的另一端固接一折臂,折臂的另一端连接一搅吸头,清淤车车体的上表面设 有一举升油缸安装座,举升油缸安装座上铰接一举升油缸,举升油缸的另一端与一举升油 缸连接座铰接,举升油缸连接座的另一端与举升臂固接,举升臂上还固接一摆臂油缸安装 座,摆臂油缸安装座上铰接一摆臂油缸,摆臂油缸的另一端与一摆臂油缸连接座铰接,摆臂 油缸连接座的另一端与摆臂固接,清淤车车体上设有用于检测举升油缸长度的举升油缸位 移传感器和用于检测摆臂油缸长度的摆臂油缸位移传感器,清淤车车体上还设有声呐测距 仪,声呐测距仪的测距端朝向下设置。 进一步地,声呐测距仪的测距端向下垂直设置,且声呐测距仪的测距端面与清淤 车车体的上表面齐平或高于清淤车车体的上表面。 进一步地,声呐测距仪固定安装在清淤车车体的尾部。 进一步地,举升油缸安装座与清淤车车体的上表面相互垂直设置,举升油缸连接 座与举升臂相互垂直设置,摆臂油缸安装座与举升臂相互垂直设置,摆臂油缸连接座与摆 臂相互垂直设置,连接段与摆臂互相垂直。 根据本发明的另一方面,提供了一种上述的水下清淤车的搅吸头离底距离检测方 法,该搅吸头离底距离检测方法包括: 通过举升油缸位移传感器获取举升油缸的长度,通过摆臂油缸位移传感器获取摆 臂油缸的长度; 根据举升油缸的长度、摆臂油缸的长度计算得到搅吸头到清淤车车体上表面的垂 直距离; 通过声呐测距仪获取声呐测距仪的端面到水底沉积物表层的垂直距离,将声呐测 4 CN 111549842 A 说 明 书 2/5 页 距仪的端面到水底沉积物表层的垂直距离减去声呐测距仪的端面到清淤车车体上表面的 垂直距离,得到清淤车车体上表面到水底沉积物表层的垂直距离; 将搅吸头到清淤车车体上表面的垂直距离加上清淤车车体上表面到水底沉积物 表层的垂直距离,即为搅吸头到水底沉积物表层的离底距离。 进一步地,根据举升油缸的长度、摆臂油缸的长度计算得到搅吸头到清淤车车体 上表面的垂直距离,包括: 根据距离AC、AD以及获取的举升油缸的长度CD,在三角形DAC中通过余弦定理求得 ∠DAC; 将∠IAD、∠SAC、∠DAC相加,求得∠IAS; 根据距离BE、BF以及获取的摆臂油缸的长度EF,在三角形FBE中通过余弦定理求得 ∠FBE; 将∠EBJ、∠FBG、∠FBE相加,求得∠GBA; 根据距离BA、BG、∠GBA,在三角形GBA中通过余弦定理求得距离AG; 根据距离BA、BG、AG,在三角形GBA中通过余弦定理求得∠GAB; 在三角形GBA中,使用180°减掉∠GAB,再减掉∠GBA,求得∠AGB; 将∠PGB减掉∠AGB,求得∠PGA; 根据距离PG、AG、∠PGA,在三角形PGA中,通过余弦定理求得距离AP; 根据距离PG、AG、AP,在三角形PGA中,通过余弦定理求得∠GAP; 根据∠IAS、∠GAB、∠GAP,在三角形PAQ中,求得∠PAQ; 在三角形PAQ中,根据距离AP、∠PAQ,通过正弦函数求解P点到参考基准线AS的垂 直距离PQ,即为搅吸头到清淤车车体上表面的垂直距离; 其中,A为举升臂与清淤车车体上表面的铰接点;B为举升臂与连接段的铰接点;C 为举升油缸与举升油缸安装座的铰接点;D为举升油缸与举升油缸连接座的铰接点;E为摆 臂油缸与摆臂油缸安装座的铰接点;F为摆臂油缸与摆臂油缸连接座的铰接点;G为摆臂与 折臂的连接点;I为举升油缸连接座与举升臂的连接点;J为摆臂油缸安装座与举升臂的连 接点;P为搅吸头的前端点;Q为搅吸头的前端点距清淤车车体上表面的垂直点;S为举升油 缸安装座与清淤车车体上表面的连接点。 进一步地,根据∠IAS、∠GAB、∠GAP,在三角形PAQ中,求得∠PAQ,包括以下两种情 况: 第一种情况为:P点在参考基准线AS上或在其上方; 此时,∠PAQ=180°-∠IAS-∠GAB-∠GAP; 第二种情况为:P点在参考基准线AS下方; 此时,∠PAQ=∠GAP-[180°-∠IAS-∠GAB]。 应用本发明的技术方案,通过举升油缸位移传感器可以实时检测举升油缸的实时 长度(即图1中距离CD),通过摆臂油缸位移传感器可以实时检测摆臂油缸的实时长度(即图 1中距离EF),通过声呐测距仪可以实时检测声呐测距仪端面到水底沉积物表层的垂直距离 (即图1中距离OH);将上述的距离和角度结合已知参数,通过简单运算即可得到搅吸头至水 底沉积物表层的离底距离(即图1中P点至直线XY的垂直距离)。该水下清淤车在检测搅吸头 的离底距离时,充分考虑了清淤车在水底沉积物上的压陷量,能够准确地测量搅吸头的离 5 CN 111549842 A 说 明 书 3/5 页 底距离,使得清淤厚度和清淤浓度与实际工况相符合。 下面将参照附图,对本发明作进一步详细的说明。 附图说明 构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示 意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1为本发明实施例的水下清淤车的结构示意简图。 其中,上述附图包括以下附图标记: 10、清淤车车体;11、车轮;20、举升臂;30、连接段;40、摆臂;50、折臂;60、搅吸头; 70、举升油缸安装座;80、举升油缸;90、举升油缸连接座;100、摆臂油缸安装座;110、摆臂油 缸;120、摆臂油缸连接座;130、声呐测距仪。











