
技术摘要:
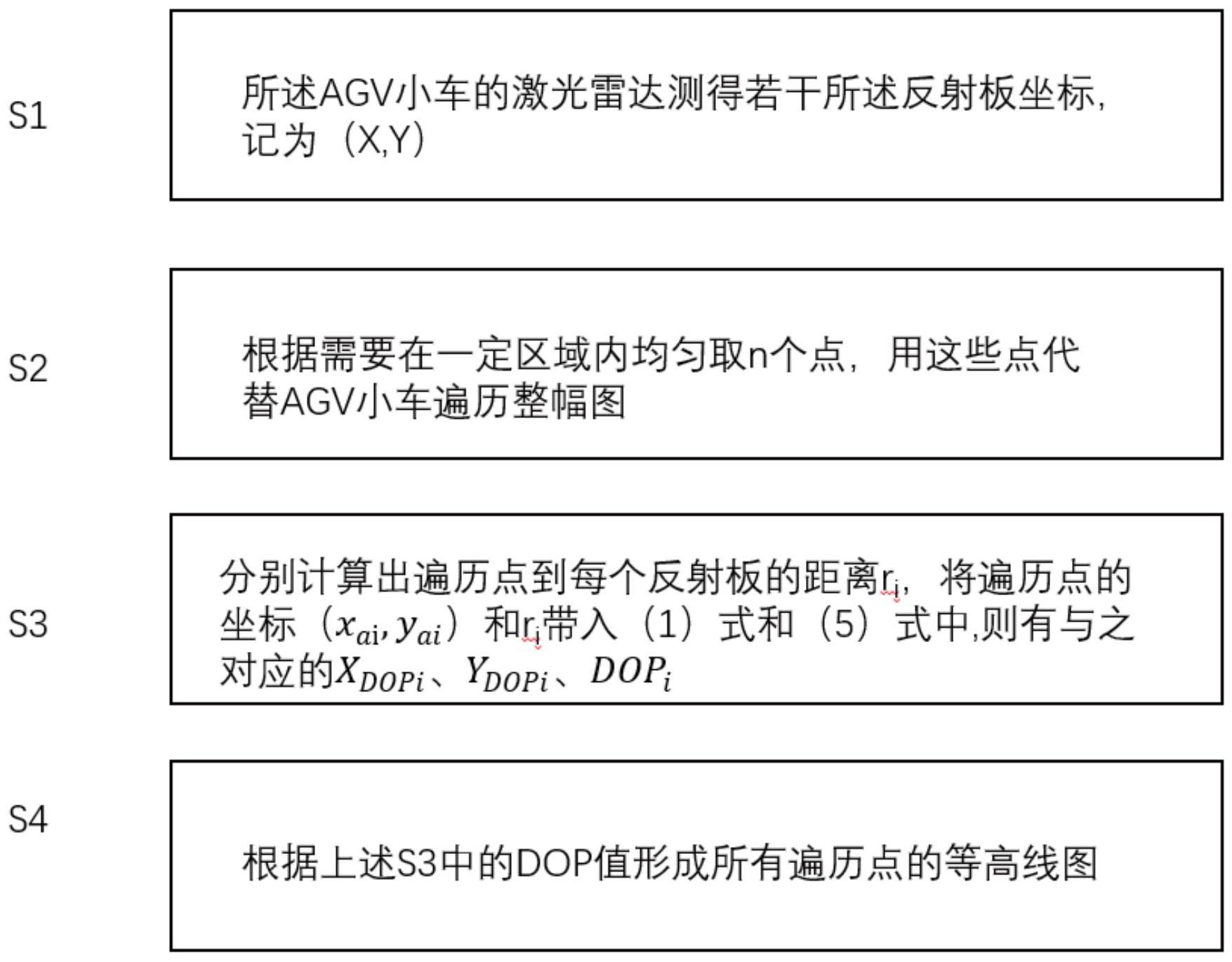
一种用于衡量AGV激光导航反射板分布质量的检测方法,包括有AGV小车以及若干用于AGV小车导航的反射板,还包括有以下步骤:S1:AGV小车的激光雷达测得若干反射板坐标,记为(X,Y);S2:根据需要在一定区域内均匀取n个点,用这些点代替AGV小车遍历整幅图;S3:分别计算出 全部
背景技术:
激光雷达技术广泛应用在AGV、无人驾驶等领域,基于激光雷达技术的AGV凭借其 较高 的稳定性,较高的定位精度,以及对场景依赖性小的特性,广泛应用在货物运输、快递 运 输等领域。激光雷达主要应用于AGV的自身定位,目前主流的定位方式是基于反射板的 三 角定位算法。 在AGV激光导航定位中需要在环境中布置多个反射板作为路标,由于场地限制和 反射 板匹配过程中需要尽量避免对称,所以反射板的布局通常是根据工程师的经验进行 随机布 局的,导致在不同区域误差的传递也具有不均匀性,这样就导致AGV激光导航定位 精度很 难衡量,现有技术存在改进之处。
技术实现要素:
为解决上述技术问题,本发明提出了一种用于衡量AGV激光导航反射板分布质量 的检 测方法,通过该检测方法来衡量反射板在使用环境下的分布质量,并能够指导反射板 的更 优设置位置。 为达到上述目的,本发明的技术方案如下:一种用于衡量AGV激光导航反射板分布 质 量的检测方法,包括有AGV小车以及若干用于所述AGV小车导航的反射板, 定义: 其中:Hij表示定位解精度及其间的相关信息; DOP为精度因子; ri为参考点到定位解的距离; 3 CN 111580073 A 说 明 书 2/3 页 (X,Y)为参考点坐标,(xa0,ya0)为定位解; H为坐标相对位置和坐标之间距离相关的量; 还包括有以下步骤: S1:AGV小车测量与若干所述反射板之间的距离,记为ri; S2:将ri带入(4)式和(5)式中;则有与之对应的XDOP、YDOP、DOP; S3:根据所述S2中的DOP形成等高线图。 通过采用上述技术方案,根据S3中形成的等高线图便可以清楚的知道AGV小车在 该布 局状态下反射板布置下的定位精度分布情况,能够来指导反射板的布局和AGV小车运 行区 域的调整,根据形成的等高线图来调整反射板的布局以满足AGV小车导航的需求,使 AGV 小车依据反射板的导航工作在最近区域。 本发明进一步设置为;所述S2与所述S3之间还包括有步骤A1:定义AGV小车的测量 误差为σr,则有σx=XDOP*σr, 通过采用上述技术方案,通过引入测量误差对定位精度进一步的解释,使等高线 图更 加贴近AGV小车与反射板之间的真实情况。 综上所述,本发明具有以下效果: 本发明公开了用于衡量AGV激光导航反射板分布质量的检测方法,采用DOP质量因 子 来模拟AGV小车在激光定位误差,根据DOP的等高线图,来衡量AGV小车在激光导航中 反 射板的布局质量问题,为发射板的布局提供指导,也可以根据等高线图来调整AGV的行 驶 路线提高AGV小车的定位精度。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述 中所 需要使用的附图作简单地介绍。 图1为实施例中AGV小车与反射板的布局示意图; 图2为实施例中等高线图; 图3为反射板分布质量检测方法的流程图。 图中:1、AGV小车;2、反射板。











