
技术摘要:
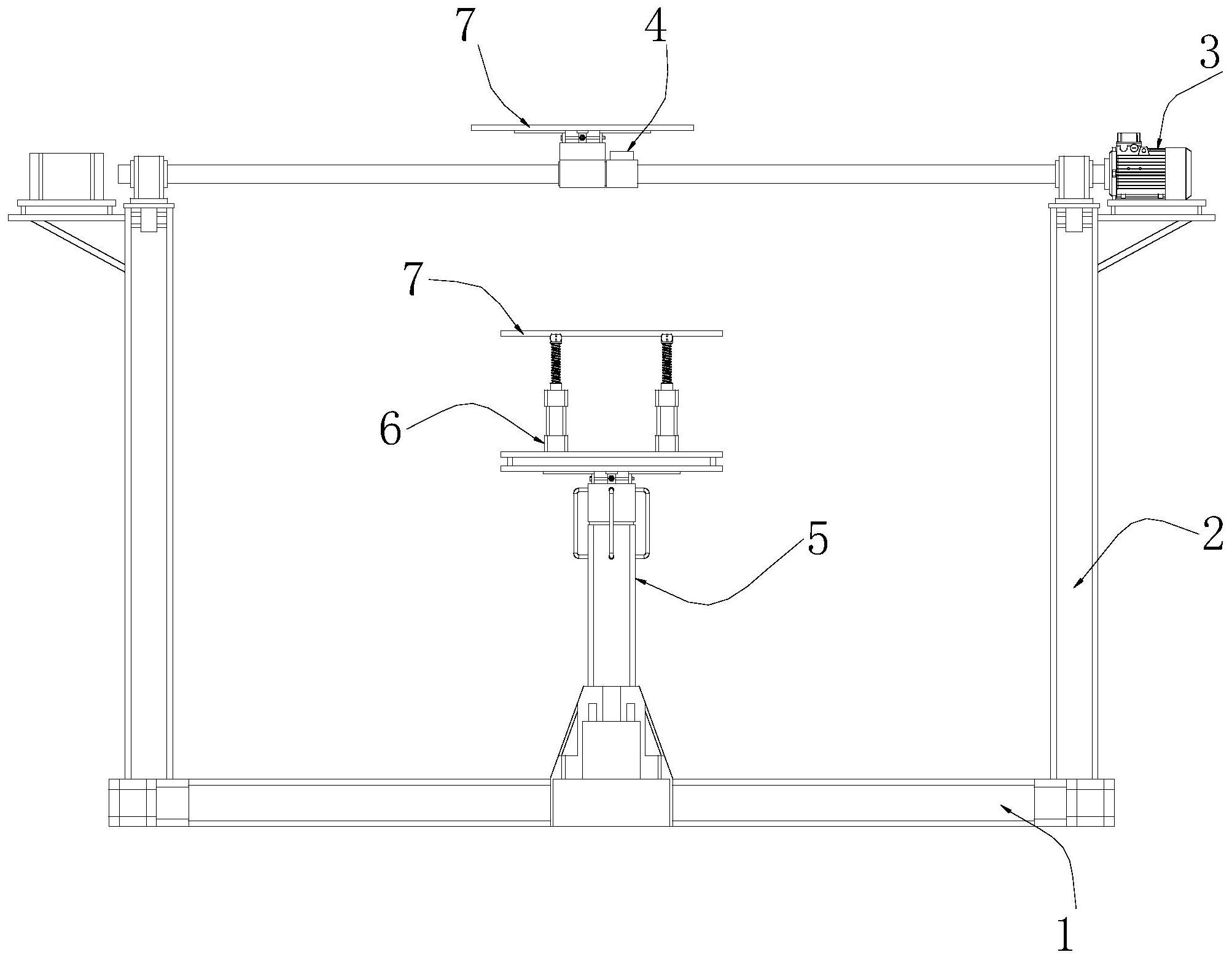
本发明属于无人机领域,具体涉及一种四旋翼无人机调试平台,包括底座,所述底座的顶部对称安装有立杆;所述立杆的顶部设置有轴向调试装置,所述轴向调试装置包括支架、电机、转轴架和转轴,所述支架对称安装在所述立杆的外壁,两个所述立杆的顶部均固定环形中空的所述 全部
背景技术:
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的 程序控制装置操纵的不载人飞机,四旋翼无人机与其它无人机相比,具有重量轻、速度快、 抓力强等特点。研究人员未来可能改善无人机的视野、提高它的着陆技术或者进一步对抓 爪进行改善。 现有技术存在以下问题: 四旋翼无人机在组装后实际飞行前需要进行调试,但现有的无人机调试架只能进 行单一运动状态下无人机运动参数的采集,无法对无人机其他运动状态下运动参数进行采 集,存在调试功能单一和调试辅助效果差。 为解决上述问题,本申请中提出一种四旋翼无人机调试平台。
技术实现要素:
(一)发明目的 为解决











