
技术摘要:
本发明涉及无人机领域,公开一种返航方法、控制器、无人机及存储介质,该返航方法包括首先获取无人机的飞行模式,根据飞行模式确定无人机的返航模式,再根据返航模式,控制无人机从当前位置向降落点返航,并于返航过程中,根据无人机的飞行速度,确定是否切换无人机的 全部
背景技术:
随着社会科技的发展,人们在越来越多的场合中看到无人机的身影,无人机是一 种通过无线电遥控设备和内置的程序来控制飞行姿态的不载人飞机,其在越来越多的领域 中得到很好地应用。 一般无人机都设置有返航功能,无人机飞离起飞点后,通过手动或自动的方式触 发返航任务,使得无人机自动的按照一定的工作逻辑返回降落到用户期望的降落点。但目 前的无人机的返航模式单一,导致无人机的返航效率不高,影响用户体验。
技术实现要素:
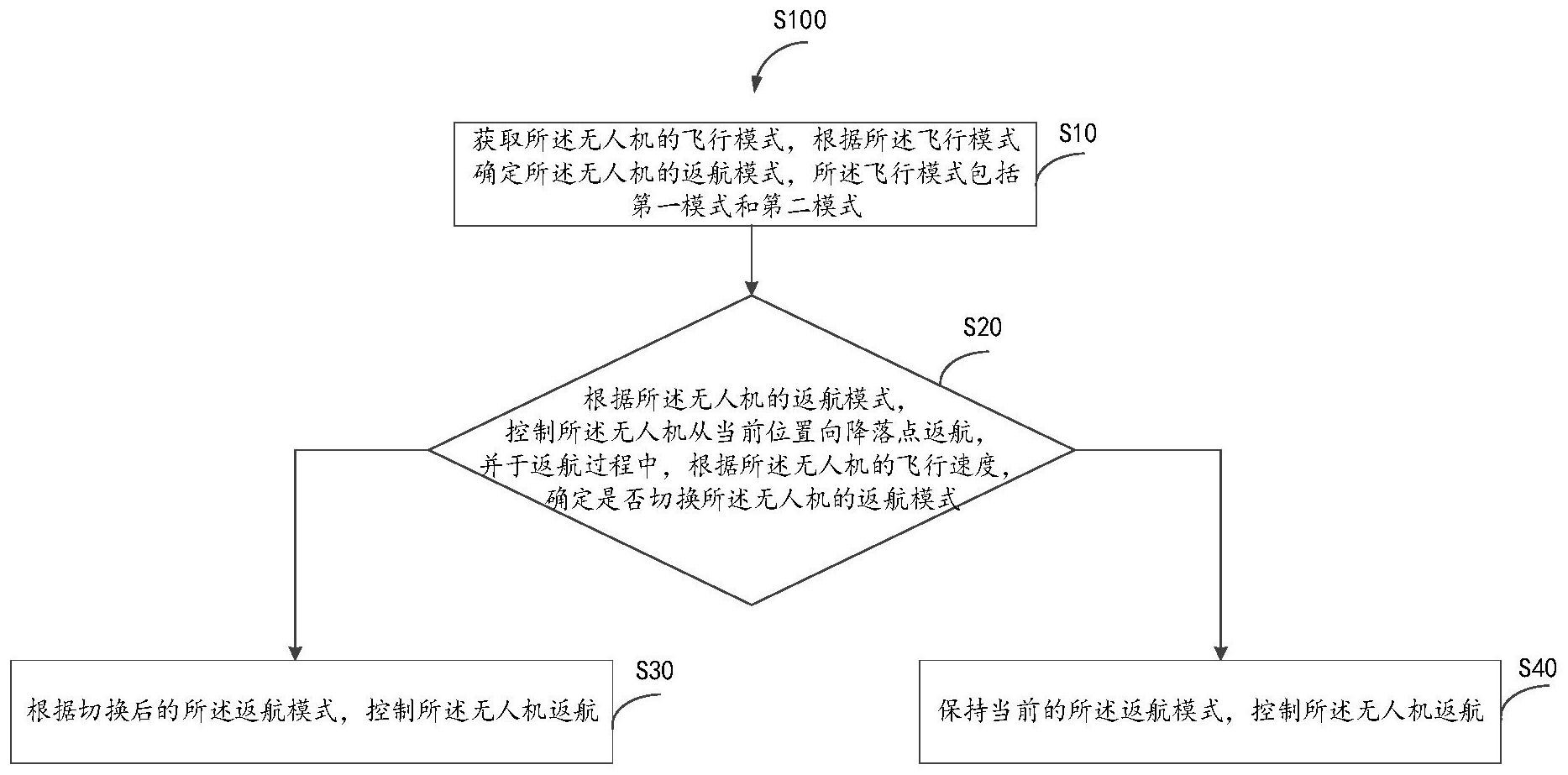
本发明实施例至少在一定程度上解决上述技术问题之一,为此本发明提供一种返 航方法、控制器、无人机及存储介质,其能够在返航过程中,切换不同的模式进行返航,提高 返航效率,改善用户体验。 第一方面,本发明实施例提供一种返航方法,应用于无人机,包括: 获取所述无人机的飞行模式,根据所述飞行模式确定所述无人机的返航模式; 根据所述无人机的返航模式,控制所述无人机从当前位置向降落点返航,并于返 航过程中,根据所述无人机的飞行速度,确定是否切换所述无人机的返航模式; 若是,根据切换后的所述返航模式,控制所述无人机返航; 若否,保持当前的所述返航模式,控制所述无人机返航。 在一些实施例中,所述返航模式包括第一模式和第二模式,当所述无人机的返航 模式为所述第一模式时,所述根据所述返航模式,控制所述无人机从当前位置向降落点返 航,并于返航过程中,根据所述无人机的飞行速度,确定是否切换所述无人机的返航模式, 包括: 控制所述无人机以所述第一模式从所述当前位置飞行至第一位置; 从所述第一位置控制所述无人机降落,并于降落过程中控制所述无人机减速; 当所述无人机的飞行速度小于或等于第一预设速度时,将所述返航模式切换为所 述第二模式。 在一些实施例中,当所述无人机的返航模式为所述第二模式时,所述根据所述返 航模式,控制所述无人机从当前位置向降落点返航,并于返航过程中,根据所述无人机的飞 行速度,确定是否切换所述无人机的返航模式,包括: 当所述无人机距离所述降落点的距离大于第一预设距离或者所述无人机的高度 大于第一预设高度时,控制所述无人机加速; 当所述无人机的飞行速度大于第二预设速度时,将所述返航模式切换为所述第一 模式。 4 CN 111552320 A 说 明 书 2/10 页 在一些实施例中,所述控制所述无人机以所述第一模式从所述当前位置飞行至第 一位置,包括: 根据所述当前位置确定第一盘旋圆心位置,以及获取盘旋半径; 根据所述第一盘旋圆心位置、所述盘旋半径以及第二预设高度确定盘旋切出点; 控制所述无人机从所述当前位置飞行至所述盘旋切出点; 根据所述降落点确定第二盘旋圆心位置和盘旋切入点; 控制所述无人机从所述盘旋切出点飞行至所述盘旋切入点; 根据所述第二盘旋圆心位置、所述盘旋半径以及第三预设高度确定所述第一位 置; 控制所述无人机从所述盘旋切入点飞行至所述第一位置。 在一些实施例中,所述控制所述无人机从所述盘旋切出点飞行至所述盘旋切入 点,包括: 获取所述无人机当前位置的障碍物信息; 根据所述障碍物信息和所述当前位置,控制所述无人机越过所述障碍物。 在一些实施例中,所述障碍物信息包括所述障碍物的高度,所述根据所述障碍物 信息和所述无人机当前位置,控制所述无人机越过所述障碍物,包括: 根据所述障碍物的高度,确定第一高度,所述第一高度高于所述障碍物的高度; 控制所述无人机从所述当前位置飞行至所述第一高度; 控制所述无人机保持所述第一高度飞行,以使所述无人机越过所述障碍物。 在一些实施例中,所述根据所述返航模式,控制所述无人机从当前位置向降落点 返航,并于返航过程中,根据所述无人机的飞行速度,确定是否切换所述无人机的返航模 式,还包括: 当所述无人机距离所述降落点的距离小于所述第一预设距离并且所述无人机的 高度小于所述第一预设高度时,以所述第二模式控制所述无人机向所述降落点降落。 在一些实施例中,所述以所述第二模式控制所述无人机向所述降落点降落,包括: 判断所述无人机距离所述降落点的距离是否小于或等于第二预设距离; 若是,控制所述无人机执行降落操作; 若否,根据所述当前位置,确定第二高度,以及控制所述无人机从所述当前位置飞 行至所述第二高度,并从所述第二高度向所述降落点降落。 在一些实施例中,所述降落操作包括: 控制所述无人机从所述当前位置垂直降落。 第二方面,本发明实施例提供一种控制器,包括: 至少一个处理器;以及, 与所述至少一个处理器通信连接的存储器;其中, 所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一 个处理器执行,以使所述至少一个处理器能够执行如上所述的返航方法。 第三方面,本发明实施例提供一种无人机,包括: 机身; 机臂,与所述机身相连; 5 CN 111552320 A 说 明 书 3/10 页 动力装置,设于所述机臂,用于提供所述无人机飞行的升力或动力;以及如上所述 的控制器,所述控制器设于所述机身。 第四方面,本发明实施例提供一种非暂态计算机可读存储介质,所述非暂态计算 机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使无人机执行如上 所述的返航方法。 本发明与现有技术相比至少具有以下有益效果:本发明中的返航方法,应用于无 人机,该返航方法包括首先获取无人机的飞行模式,根据飞行模式确定无人机的返航模式, 再根据返航模式,控制无人机从当前位置向降落点返航,并于返航过程中,根据无人机的飞 行速度,确定是否切换无人机的返航模式,若切换,则根据切换后的返航模式返航,若不切 换,则保持当前的返航模式返航。因此,该返航方法结合多种返航模式进行返航,并且可以 在返航过程中,根据无人机的实际情况,切换无人机的返航模式,提高无人机的返航效率, 改善用户体验。 附图说明 一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说 明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除 非有特别申明,附图中的图不构成比例限制。 图1是本发明实施例的应用环境示意图; 图2是如图1所示的无人机中控制器的硬件结构示意图; 图3是本发明实施例提供的一种返航方法的流程示意图; 图4是图3中步骤S20的流程示意图; 图5是图4中步骤S21的流程示意图; 图6是图5中步骤S215的流程示意图; 图7是本发明另一实施例提供的步骤S20的流程示意图; 图8是本发明又另一实施例提供的步骤S20的流程示意图; 图9是图8中步骤S26的流程示意图; 图10是本发明实施例提供的一种返航装置的结构示意图。











