
技术摘要:
本发明公开了一种机器人的定位补偿方法及装置。其中,该方法包括:采集机器人在预设空间网格移动时的移动点集,其中,空间网格是指在机器人的工作区域按照预定步长的立方体划分的网格;利用移动点集训练得到误差补偿模型,其中,误差补偿模型是根据机器人的法兰中心点 全部
背景技术:
相关技术中,机器人在产品生产制造、加工装配等方面的应用越来越广泛.由于采 用工业机器人进行加工装配时主要依赖于绝对定位精度,若是绝对定位精度过低会严重影 响产品质量,现有提高机器人定位精度的方案包括:离线误差补偿和在线误差补偿。其中, 离线误差补偿即在使用机器人进行工作之前,通过一定的方法补偿机器人定位精度,如数 学逼近方法和在线误差补偿等,但这些补偿机器人定位精度的方法都存在一些不足,数学 逼近法求解复杂非线性模型的效果欠佳,难以满足飞机钻铆等应用的高精度要求;在线误 差补偿通常需要在机器人末端增加一个实时反馈装置,使机器人在工作过程中能够不断地 调整末端直至理想位置。而在线误差补偿,通常能够获得较高的定位精度,但是在机器人末 端执行器上增加反馈装置使得机器人在一些复杂场景中不易操作,容易导致机器人的定位 精度补偿速度慢,且适应性较低。 针对上述的问题,目前尚未提出有效的解决方案。
技术实现要素:
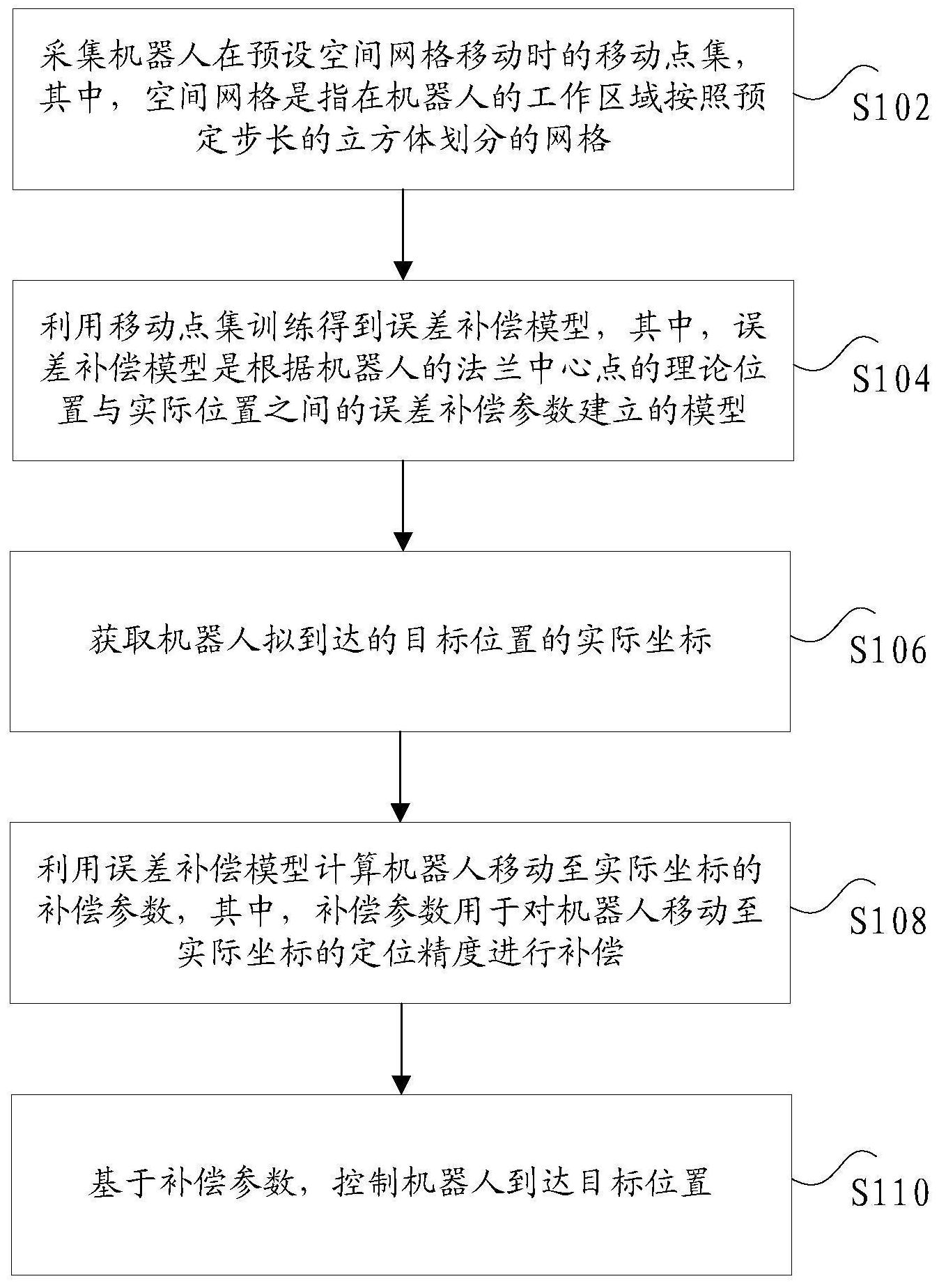
本发明实施例提供了一种机器人的定位补偿方法及装置,以至少解决相关技术中 机器人定位误差补偿速度较慢,且适应性低,无法满足机器人的定位精度补充需求的技术 问题。 根据本发明实施例的一个方面,提供了一种机器人的定位补偿方法,包括:采集机 器人在预设空间网格移动时的移动点集,其中,所述空间网格是指在机器人的工作区域按 照预定步长的立方体划分的网格;利用所述移动点集训练得到误差补偿模型,其中,所述误 差补偿模型是根据所述机器人的法兰中心点的理论位置与实际位置之间的误差补偿参数 建立的模型;获取机器人拟到达的目标位置的实际坐标;利用所述误差补偿模型计算所述 机器人移动至所述实际坐标的补偿参数,其中,所述补偿参数用于对所述机器人移动至所 述实际坐标的定位精度进行补偿;基于所述补偿参数,控制所述机器人到达所述目标位置。 可选地,采集机器人在预设空间网格移动时的移动点集的步骤,包括:以所述机器 人的基坐标系为基准,以所述预定步长作为划分规则,将所述机器人的工作区域划分为多 个空间立方体;从所述机器人的工作区域的第一个基点开始,按照预设采集规则在多个空 间立方体中采集所述机器人末端的采样点的三维坐标;基于所述三维坐标,确定所述机器 人在移动时的移动点集。 可选地,在采集机器人在预设空间网格移动时的移动点集之后,所述定位补偿方 法还包括:将所述多个空间立方体划分为多个采样层;采集所述机器人在每个采样层中各 坐标系方向的变化参数和变化特征;基于所述变化参数和所述变化特征,建立所述误差补 4 CN 111590581 A 说 明 书 2/12 页 偿模型。 可选地,利用所述移动点集训练得到误差补偿模型包括:以第一向量表示所述移 动点集中每个采样点的对应的实际坐标,并以第二向量表示所述移动点集中每个采样点对 应的理论坐标;确定构建所述误差补偿模型的反馈神经网络,所述反馈神经网络包括:输入 层、隐含层、输出层;将所述第一向量和第二向量组成的向量集输入至所述反馈神经网络的 输入层;确定所述输入层的神经元与所述隐含层的神经元之间的第一连接权值,并确定所 述隐含层的神经元与所述输出层的神经元之间的第二连接权值;基于所述第一连接权值和 所述第二连接权值,确定采样点的理论坐标集和测试坐标集;基于所述理论坐标集确定所 述误差补偿模型,并利用所述测试坐标集对所述误差补偿模型进行测试。 可选地,确定所述输入层的神经元与所述隐含层的神经元之间的第一连接权值, 并确定所述隐含层的神经元与所述输出层的神经元之间的第二连接权值包括:确定所述隐 含层的神经元个数;基于所述神经元个数,产生所述输入层的神经元与所述隐含层的神经 元之间的第一连接权值;确定构建误差补偿模型的激活函数和隐含层输出矩阵;基于所述 激活函数、所述隐含层输出矩阵、所述第一连接权值和所述隐含层的神经元数量阈值,确定 所述隐含层的神经元与所述输出层的神经元之间的第二连接权值。 可选地,在利用所述移动点集训练得到误差补偿模型之后,所述定位补偿方法还 包括:基于每个采样点的实际坐标和理论坐标,确定与每个采样点对应的误差向量和绝对 误差值;基于所述误差向量和所述绝对误差值,确定与每个采样点对应的预测偏差值;基于 每个采样点的预测偏差值,计算预测偏差平均值;基于所述预测偏差平均值,筛选目标取值 区间,其中,所述目标取值区间用于优化所述误差补偿模型的计算准确度。 可选地,利用极限学习算法ELM构建所述误差补偿模型。 根据本发明实施例的另一方面,还提供了一种机器人的定位补偿装置,包括:采集 单元,用于采集机器人在预设空间网格移动时的移动点集,其中,所述空间网格是指在机器 人的工作区域按照预定步长的立方体划分的网格;训练单元,用于利用所述移动点集训练 得到误差补偿模型,其中,所述误差补偿模型是根据所述机器人的法兰中心点的理论位置 与实际位置之间的误差补偿参数建立的模型;获取单元,用于获取机器人拟到达的目标位 置的实际坐标;移动单元,用于利用所述误差补偿模型计算所述机器人移动至所述实际坐 标的补偿参数,其中,所述补偿参数用于对所述机器人移动至所述实际坐标的定位精度进 行补偿;控制单元,用于基于所述补偿参数,控制所述机器人到达所述目标位置。 可选地,所述采集单元包括:第一划分模块,用于以所述机器人的基坐标系为基 准,以所述预定步长作为划分规则,将所述机器人的工作区域划分为多个空间立方体;第一 采集模块,用于从所述机器人的工作区域的第一个基点开始,按照预设采集规则在多个空 间立方体中采集所述机器人末端的采样点的三维坐标;第一确定模块,用于基于所述三维 坐标,确定所述机器人在移动时的移动点集。 可选地,所述定位补偿装置还包括:第二划分模块,用于在采集机器人在预设空间 网格移动时的移动点集之后,将所述多个空间立方体划分为多个采样层;第二采集模块,用 于采集所述机器人在每个采样层中各坐标系方向的变化参数和变化特征;第一建立模块, 用于基于所述变化参数和所述变化特征,建立所述误差补偿模型。 可选地,所述训练单元包括:第二确定模块,用于以第一向量表示所述移动点集中 5 CN 111590581 A 说 明 书 3/12 页 每个采样点的对应的实际坐标,并以第二向量表示所述移动点集中每个采样点对应的理论 坐标;第三确定模块,用于确定构建所述误差补偿模型的反馈神经网络,所述反馈神经网络 包括:输入层、隐含层、输出层;第一输入模块,用于将所述第一向量和第二向量组成的向量 集输入至所述反馈神经网络的输入层;第四确定模块,用于确定所述输入层的神经元与所 述隐含层的神经元之间的第一连接权值,并确定所述隐含层的神经元与所述输出层的神经 元之间的第二连接权值;第五确定模块,用于基于所述第一连接权值和所述第二连接权值, 确定采样点的理论坐标集和测试坐标集;第六确定模块,用于基于所述理论坐标集确定所 述误差补偿模型,并利用所述测试坐标集对所述误差补偿模型进行测试。 可选地,所述第四确定模块包括:第一确定子模块,用于确定所述隐含层的神经元 个数;第一产生模块,用于基于所述神经元个数,产生所述输入层的神经元与所述隐含层的 神经元之间的第一连接权值;第二确定子模块,用于确定构建误差补偿模型的激活函数和 隐含层输出矩阵;第三确定子模块,用于基于所述激活函数、所述隐含层输出矩阵、所述第 一连接权值和所述隐含层的神经元数量阈值,确定所述隐含层的神经元与所述输出层的神 经元之间的第二连接权值。 可选地,所述定位补偿装置还包括:第七确定模块,用于在利用所述移动点集训练 得到误差补偿模型之后,基于每个采样点的实际坐标和理论坐标,确定与每个采样点对应 的误差向量和绝对误差值;第八确定模块,用于基于所述误差向量和所述绝对误差值,确定 与每个采样点对应的预测偏差值;计算模块,用于基于每个采样点的预测偏差值,计算预测 偏差平均值;筛选模块,用于基于所述预测偏差平均值,筛选目标取值区间,其中,所述目标 取值区间用于优化所述误差补偿模型的计算准确度。 可选地,利用极限学习算法ELM构建所述误差补偿模型。 根据本发明实施例的另一方面,还提供了一种工业机器人,包括:处理器;以及存 储器,用于存储所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指 令来执行上述任意一项所述的机器人的定位补偿方法。 根据本发明实施例的另一方面,还提供了一种计算机存储介质,所述计算机存储 介质包括存储的程序,其中,在所述程序运行时控制所述计算机存储介质所在设备执行上 述任意一项所述的机器人的定位补偿方法。 本发明实施例中,在对机器人定位精度进行补偿时,先采集机器人在预设空间网 格移动时的移动点集,然后利用移动点集训练得到误差补偿模型,之后可获取机器人拟到 达的目标位置的实际坐标,利用误差补偿模型计算机器人移动至实际坐标的补偿参数,基 于补偿参数,控制机器人到达目标位置。在该实施例中,可以采用不同采样间隔的移动点集 作为训练集进行误差补偿模型训练和补偿测试,并建立机器人法兰中心点理论位置与实际 位置之间的误差补偿模型,通过误差补偿模型可对机器人的工作区域内任意一点的绝对定 位精度进行补偿,补偿速度快,且绝对定位精度高、泛化性能好,能够满足机器人的定位精 度需求,从而解决相关技术中机器人定位误差补偿速度较慢,且适应性低,无法满足机器人 的定位精度补充需求的技术问题。 附图说明 此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发 6 CN 111590581 A 说 明 书 4/12 页 明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1是根据本发明实施例的一种可选的机器人的定位补偿方法的流程图; 图2是根据本发明实施例的一种可选的空间网格采样点规划的示意图; 图3是根据本发明实施例的一种可选的反馈神经网络的结构示意图; 图4是根据本发明实施例的一种可选的构建误差补偿模型的示意图; 图5是根据本发明实施例的一种可选的工业机器人各坐标系转换关系的示意图; 图6是根据本发明实施例的一种可选的机器人各坐标系的转换方法的流程图; 图7是根据本发明实施例的一种可选的机器人的定位补偿装置的示意图。











