
技术摘要:
本发明提供一种基于LMS算法的半球谐振子特征参数辨识方法,包括:采集振动陀螺的检测信号进行数据处理,包括将检测信号与参考信号相乘,解算得到椭圆坐标系下的参数方程。通过幅度控制、正交控制和频率控制,使参数逐渐收敛至稳定状态。根据解算得到的椭圆坐标系下的参 全部
背景技术:
由于实际工艺水平的限制,制备得到的非理想半球谐振子往往会存在许多误差。 因此,为了准确评估半球谐振子的性能指标,判断其是否达到合格标准,就需要对以下半球 谐振子特征参数进行测试:刚度轴各向异性Δω;刚度轴失准角θω;阻尼轴各向异性Δ(1/ τ);阻尼轴失准角θτ。 目前,半球谐振子特征参数的辨识,大多是通过精确测量半球谐振子来得到较为 准确的特征参数值。这种方法操作和运算较为复杂,且需要十分精密的测量仪器。为此,本 专利提出一种更为简洁且不需要精密测量仪器的辨识方法。
技术实现要素:
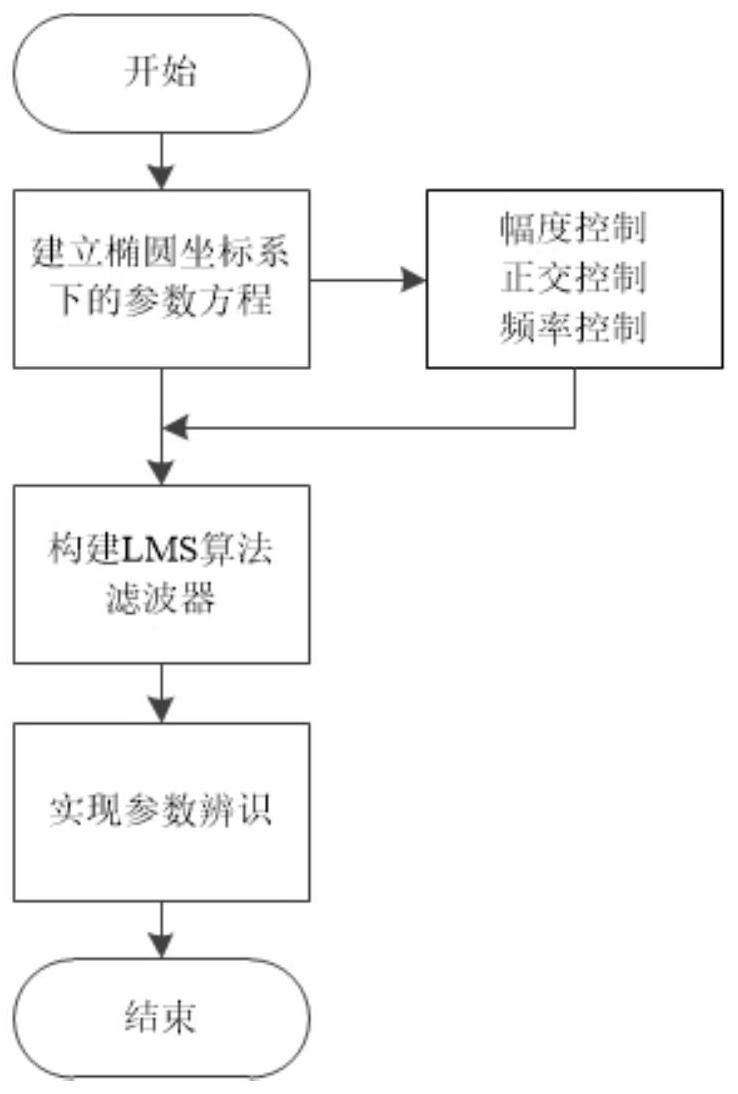
本发明的目的是为了克服参数辨识困难的问题而提出的一种基于LMS算法的半球 谐振子特征参数辨识方法,用以获取精确的特征参数:Δω、Δ(1/τ)、θω、θτ,为半球谐振子 的性能评估提供一种便捷有效的方法。 本发明的目的是这样实现的:步骤如下: 步骤1:非理想半球谐振子在椭圆轨道坐标系下的运动微分方程为: 式中:a的数值反映了陀螺的振动幅度大小;q的数值反映了陀螺偏离理想简正模 态的程度;θ为角度信号; 是振动信号和参考信号之间出现微小相差;Δω是刚度轴各向 异性;θω是刚度轴失准角;Δ(1/τ)是阻尼轴各向异性;θτ是阻尼轴失准角; 步骤2:全角模式时,对陀螺施加幅度控制、正交控制、频率控制和相位控制; 步骤3:构建LMS算法滤波器, 步骤4:根据步骤3中的方法,分别构建关于 和 的LMS算法参数辨识模型; 步骤5:求解刚度轴各向异性Δω; 步骤6:求解刚度轴失准角θω。 5 CN 111578966 A 说 明 书 2/9 页 本发明还包括这样一些结构特征: 1.步骤2具体是: 由幅度控制,维持a=a_setting; 由正交控制,维持q的常数项为0但残余正弦变化的部分,且q<<a;因此,可以得 到下列公式: 展开其中的第二、第三项公式得到: 2.步骤3具体包括: (1)对于原始信号经过延迟处理后得到对应不同延迟的输入信号x(k); (2)对权向量信号w(k)进行初始化设置; (3)根据(1)中得到x(k)与其对应权向量信号w(k)的转置wT(k)相乘,得到该时刻 的输出信号y(k); (4)将参考信号d(k)与根据(3)中得到该时刻的输出信号y(k)作差,得到误差信号 e(k); (5)权向量信号更新方法为: w(k 1)=w(k) μe(k)x(k) (6)整体算法运算过程为: 3.步骤4中构建关于 和 的LMS算法参数辨识模型的方法相同,其中:构建 的LMS 算法参数辨识模型包括: 根据: 6 CN 111578966 A 说 明 书 3/9 页 得到关于 的LMS算法参数辨识模型为: 4 .步骤5具体为:当期望响应 与输出 的差足够小时,即误差 足 够小时,根据LMS算法的特性,此时权值向量w1(k)与w2(k)均已收敛;此时有: 由LMS算法滤波器的特性得到:w1(k)的输出为: w2(k) 的输出为: 则有: 5.步骤6中的 与现有技术相比,本发明的有益效果是:与现有技术相比,本发明的有益效果是: 现有技术需要使用精密仪器对半球谐振子实物进行测量,通过一系列计算后得出半球谐振 子的特征参数,操作复杂,且在谐振子装配后不可测量。而本发明则具有以下优点:首先,该 方法具有简洁性,只需要将半球谐振陀螺接入驱动检测装置中,其余解算均由处理器完成。 其次,该方法具有适用性,驱动检测装置可以适用于绝大多数半球谐振子的测定。最后,该 方法具有实时性和准确性,可以在陀螺装配完成后进行测试,且测试结果准确,可以直接使 用。 此外,由于本专利中所涉及的方法需要将半球谐振子的振型旋转起来,旋转越快 则辨识速率越快。因此,我们可以将振动陀螺固联在转台上,借助转台的快速旋转来提高特 7 CN 111578966 A 说 明 书 4/9 页 征参数的辨识速率。 附图说明 图1是基于LMS算法的半球谐振子特征参数辨识方法流程图。 图2是LMS算法滤波器结构图。 图3是基于LMS算法的半球谐振子特征参数辨识方法具体实施的结构框图。











