
技术摘要:
本发明公开的一种艾灸机械臂避碰撞安全防护方法,包括以下步骤:搭建艾灸机械臂安全防护系统,获取患者人体数据和艾灸机械臂状态信息;构建可变半径的人体与艾灸机械臂球扫掠凸体碰撞检测模型;分别建立人体数据、艾灸机械臂状态信息与人体、艾灸机械臂球扫掠凸体碰撞 全部
背景技术:
传统的机械臂人机交互安全防护策略常采用碰撞检测技术,构建机械臂与人体的 碰撞检测模型,常用的碰撞检测模型包括凸体、轴向包围盒(AAB B)、球包围盒(Sphere)、方 向包围盒(OBB)等。通过实时计算空间中两模型的最短距离,来保证此最短距离在低于固定 安全阈值时机械臂有相应的防护策略。这种策略的实际效果并不理想,主要问题在于其常 采用固定的安全阈值,当患者情绪有波动或处于运动状态下时机械臂需要一定的制动距 离,因此安全阈值需要根据不同情况进行实时地改变。本发明引入可变半径的球扫掠凸体 碰撞检测技术,构建患者情绪、运动状态、机械臂状态与碰撞检测模型半径之间的关系,实 现机械臂与人碰撞检测安全阈值的实时调整,从而增强艾灸机械臂的人机交互安全性。
技术实现要素:
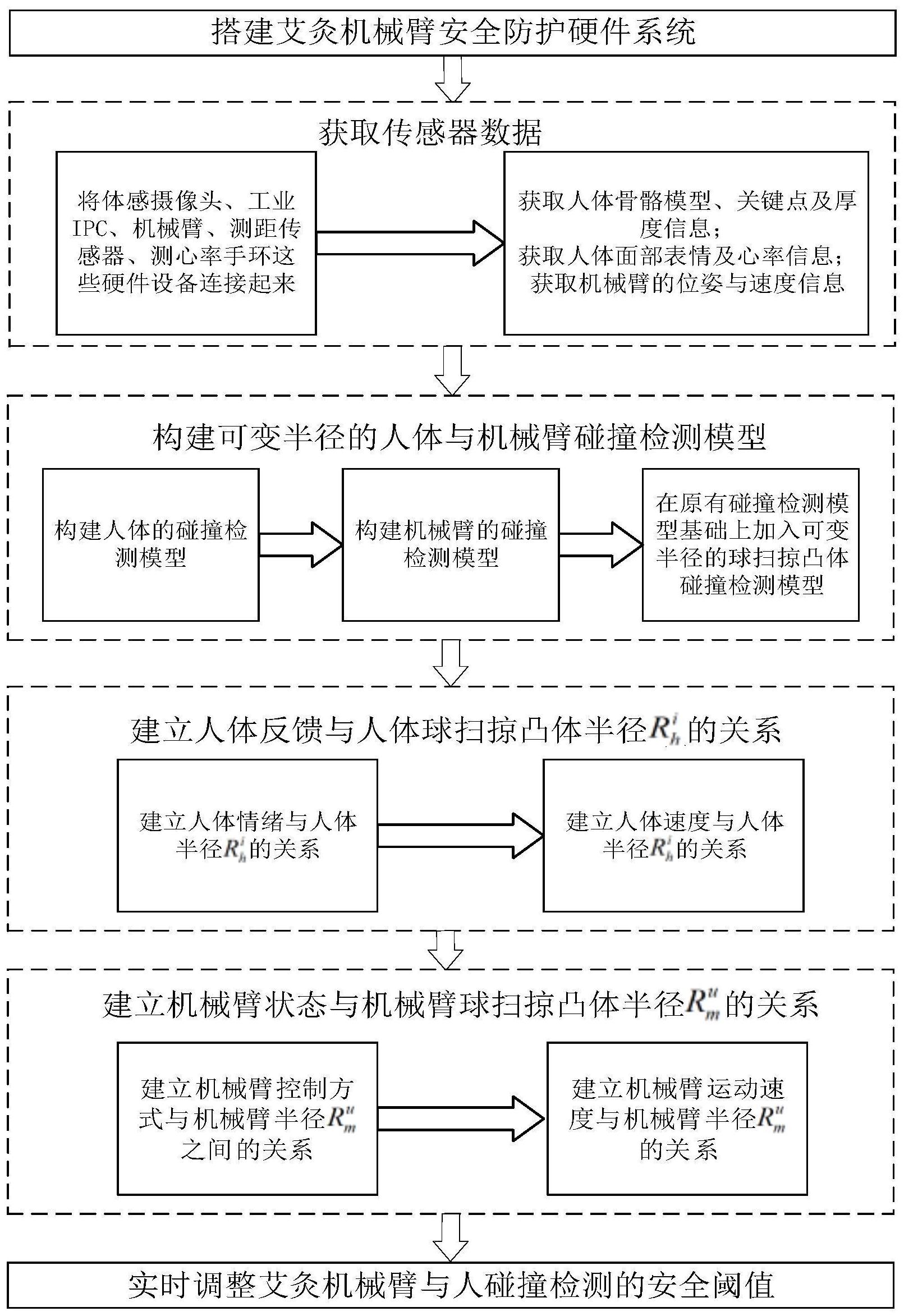
本发明的目的在于提供一种艾灸机械臂避碰撞安全防护方法,增强了艾灸机械臂 的人机交互安全性。 本发明所采用的技术方案是:一种艾灸机械臂避碰撞安全防护方法,包括以下步 骤: 步骤1、搭建艾灸机械臂安全防护系统,获取患者人体数据和艾灸机械臂状态信 息; 步骤2、构建可变半径的人体与艾灸机械臂球扫掠凸体碰撞检测模型; 步骤3、建立人体数据与人体球扫掠凸体碰撞检测模型半径的关系; 步骤4、建立艾灸机械臂状态信息与艾灸机械臂球扫掠凸体碰撞检测模型半径的 关系; 步骤5、构建碰撞检测对,设置并实时调整艾灸机械臂与患者碰撞检测的安全阈 值。 本发明的特点还在于, 步骤1中搭建的艾灸机械臂安全防护系统包括位于艾灸机械臂,艾灸机械臂的靠 近患者的一端设置有艾棒,艾灸机械臂一侧设置有视场覆盖患者的体感摄像头,还包括佩 戴于患者手臂的测心率手环,测心率手环、体感摄像头和艾灸机械臂共同连接有机械臂控 制柜进行实时通信;步骤1中获取的患者人体数据包括通过体感摄像头获取的患者表情,通 过测心率手环获取的患者心率,通过体感摄像头获取的患者人体骨骼模型与关键点信息; 步骤1中获取的艾灸机械臂状态信息包括通过艾灸机械臂自身关节位置传感器获取的艾灸 机械臂的控制方式和运动速度信息。 步骤2中构建的可变半径的人体与艾灸机械臂球扫掠凸体碰撞检测模型包括构建 5 CN 111604897 A 说 明 书 2/7 页 可变半径的人体球扫掠凸体碰撞检测模型,得到人体球扫掠凸体碰撞检测模型半径 其 中i为可变半径的人体球扫掠凸体碰撞检测模型的构件编号,i=1,2,3,…,10;还包括构建 可变半径的艾灸机械臂球扫掠凸体碰撞检测模型,得到艾灸机械臂球扫掠凸体碰撞检测模 型半径 其中u为可变半径的艾灸机械臂球扫掠凸体碰撞检测模型的构件编号,u=1,2, 3,4,5。 步骤3具体包括以下步骤: 步骤3.1:通过患者表情与心率表征患者的情绪,将获取的患者表情分为正面表情 和负面表情,则对应得到患者的情绪依次为正面情绪和负面情绪,分别建立患者的正面情 绪下心率与人体球扫掠凸体碰撞检测模型半径 的关系 —Hr,患者的负面情绪下心率 与人体球扫掠凸体碰撞检测模型半径 的关系 —Hr: 当患者为正面情绪时,关系 —Hr为: 公式(1)中Hr为患者的实时心率;n2为正面情绪时患者的心率下限;n3为患者的心 率上限,当Hr>n3时暂停治疗;a、b均为常系数; 为正面情绪下人体球扫掠凸体碰撞检 测模型半径; 当患者为负面情绪时,关系 —Hr为: 公式(2)中Hr为患者的实时心率;n1为患者的标准心率;n3为患者的心率上限,当Hr >n3时暂停治疗;c、d均为常系数, 为负面情绪下人体球扫掠凸体碰撞检测模型半径; 公式(1)和公式(2)中,n1、n2、n3和Hr的单位均为次/分钟且n3>n2>n1; 步骤3.2:通过患者人体骨骼模型与关键点信息计算患者的人体速度,建立人体速 度与人体球扫掠凸体碰撞检测模型半径 的关系 —Vh如下: 公式(3)中, 为运动时的人体球扫掠凸体碰撞检测模型半径,α为艾灸机械臂 减速时的最大加速度,Vh为患者的瞬时速度,通过如下公式(4)得到: 公式(4)中,T为体感摄像头内置传感器的采样周期,采集到初始点的位置信息为 Ai(x1,y1,z1),一个采样周期后,采集到结束点的位置信息为Bi(x2,y2,z2),则初始点到结束 6 CN 111604897 A 说 明 书 3/7 页 点在T时间内移动的距离 步骤3.3:通过步骤3.1和步骤3.2建立的人体数据与人体球扫掠凸体碰撞检测模 型半径 关系为: 当患者为正面情绪时, 当患者为负面情绪时, 步骤4具体包括以下步骤: 步骤4.1:建立艾灸机械臂控制方式与艾灸机械臂球扫掠凸体碰撞检测模型半径 之间的关系,艾灸机械臂的控制方式按运动控制的方式分为位置/速度控制与柔顺控 制: 当艾灸机械臂处于柔顺控制方式下,艾灸机械臂球扫掠凸体碰撞检测模型半径 其中 为柔顺控制方式下艾灸机械臂球扫掠凸体碰撞检测模型半径; 当艾灸机械臂处于位置/速度控制方式下,艾灸机械臂球扫掠凸体碰撞检测模型 半径 其中 为位置/速度控制方式下艾灸机械臂球扫掠凸体碰撞检测模型半 径,f为常数; 步骤4.2:建立艾灸机械臂运动速度与艾灸机械臂球扫掠凸体碰撞检测模型半径 之间的关系如下: 公式(5)中, 为运动时的艾灸机械臂球扫掠凸体碰撞检测模型半径,α为艾灸机 械臂减速时的最大加速度,Vm为艾灸机械臂的实时运动速度信息; 步骤4.3:通过步骤4.1和步骤4.2建立的艾灸机械臂状态信息与艾灸机械臂球扫 掠凸体碰撞检测模型半径 关系为: 当艾灸机械臂处于柔顺控制方式下, 当艾灸机械臂处于位置/速度控制方式下, 步骤5具体为:构建碰撞检测对,设置艾灸机械臂与患者碰撞检测的安全阈值为 当人体与艾灸机械臂基础碰撞检测模型的间距小于安全阈值时,系统预判发生碰 撞,机械臂控制柜控制艾灸机械臂停止运行或切换为柔顺控制方式。 本发明的有益效果是:本发明一种艾灸机械臂避碰撞安全防护方法,引入可变半 径的球扫掠凸体碰撞检测模型,构建患者情绪、运动状态、艾灸机械臂状态与碰撞检测模型 半径之间的关系,实现艾灸机械臂与人碰撞检测安全阈值的实时调整,从而增强艾灸机械 臂的人机交互安全性。 7 CN 111604897 A 说 明 书 4/7 页 附图说明 图1是本发明一种艾灸机械臂避碰撞安全防护方法的流程图; 图2是本发明一种艾灸机械臂避碰撞安全防护方法中搭建的艾灸机械臂安全防护 系统示意图; 图3是本发明一种艾灸机械臂避碰撞安全防护方法中构建的可变半径的人体球扫 掠凸体碰撞检测模型示意图; 图4是本发明一种艾灸机械臂避碰撞安全防护方法中构建的可变半径的艾灸机械 臂球扫掠凸体碰撞检测模型示意图; 图5a)是本发明一种艾灸机械臂避碰撞安全防护方法中患者正面情绪时的 — Hr函数图; 图5b)是本发明一种艾灸机械臂避碰撞安全防护方法中患者负面情绪时的 — Hr函数图; 图6是本发明一种艾灸机械臂避碰撞安全防护方法中人体速度与可变半径的人体 球扫掠凸体碰撞检测模型 —Vh函数图。 图中,1.体感摄像头,2.艾灸机械臂,3.测距传感器,4.艾棒,5.机械臂控制柜,6. 测心率手环,7.艾灸机械臂基座,8.第一关节,9.第二关节,10.第三关节,11.第四关节。











