
技术摘要:
本申请提供一种检测方法、装置、毫米波雷达、计算机可读存储介质,检测方法包括获取回波信号对应的包括距离维和速度维的二维频谱,二维频谱上至少包括相邻的第一检测目标和第二检测目标;获取第一检测目标对应的第一检测值和第一噪声因子,根据预设的恒虚警概率和第一 全部
背景技术:
毫米波雷达是测量被测物体相对距离、相对速度、方位的高精度传感器,早期被应 用于军事领域,随着雷达技术的发展与进步,毫米波雷达传感器开始应用于汽车电子、无人 机,智能交通等多个领域。在汽车领域,毫米波雷达受雨、雪、雾霾等天气的干扰小,环境适 应性强,是汽车安全技术研究热点。 然而,车载毫米波雷达在多检测目标的环境下,检测效率较低。
技术实现要素:
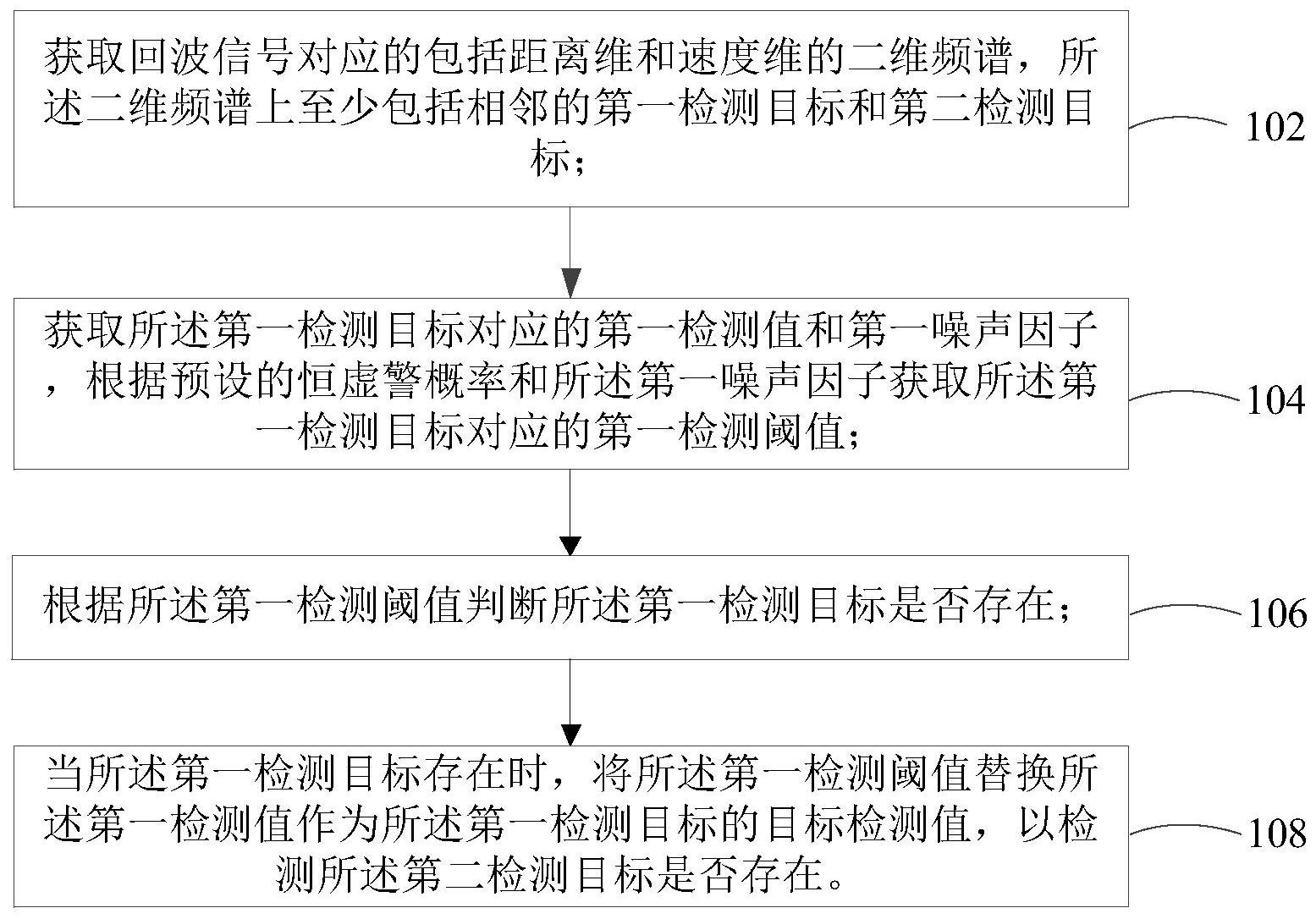
本申请实施例提供了一种检测方法、装置、毫米波雷达、计算机可读存储介质,可 以提升检测效率。 一种检测方法,应用于毫米波雷达,包括: 获取回波信号对应的包括距离维和速度维的二维频谱,所述二维频谱上至少包括 相邻的第一检测目标和第二检测目标; 获取所述第一检测目标对应的第一检测值和第一噪声因子,根据预设的恒虚警概 率和所述第一噪声因子获取所述第一检测目标对应的第一检测阈值; 根据所述第一检测阈值判断所述第一检测目标是否存在; 当所述第一检测目标存在时,将所述第一检测阈值替换所述第一检测值作为所述 第一检测目标的目标检测值,以检测所述第二检测目标是否存在。 在其中一个实施例中,所述根据所述第一检测阈值确定所述第一检测目标是否存 在之后,所述方法还包括: 当所述第一检测目标不存在时,直接检测所述第二检测目标是否存在。 在其中一个实施例中,所述以检测所述第二检测目标是否存在,包括: 获取所述第二检测目标对应的第二检测值和第二噪声因子; 根据所述恒虚警概率和所述第二噪声因子获取所述第二检测目标对应的第二检 测阈值; 根据所述第二检测阈值确定所述第二检测目标是否存在。 在其中一个实施例中,所述根据所述第一检测阈值判断所述第一检测目标是否存 在,包括: 根据所述第一检测值、所述第一噪声因子和所述第一检测阈值判断所述第一检测 目标是否存在。 在其中一个实施例中,所述根据所述第一检测值、所述第一噪声因子和所述第一 检测阈值判断所述第一检测目标是否存在,包括: 4 CN 111610515 A 说 明 书 2/8 页 当所述第一检测值和所述第一噪声因子的差值大于所述第一检测阈值时,判定所 述第一检测目标存在; 当所述第一检测值和所述第一噪声因子的差值小于或等于所述第一检测阈值时, 判定所述第一检测目标不存在。 在其中一个实施例中,所述获取所述第一检测目标对应的第一噪声因子,包括: 确定出所述第一检测目标对应的第一检测单元和所述第一检测单元对应的多个 第一保护单元,各个所述第一保护单元与所述第一检测单元相邻; 根据各个所述第一保护单元对应的噪声因子获取所述第一检测目标对应的所述 第一噪声因子。 在其中一个实施例中,所述根据各个所述第一保护单元对应的噪声因子获取所述 第一检测目标对应的所述第一噪声因子,包括: 将各个所述第一保护单元对应的噪声因子取均值或进行有序排列以获取所述第 一噪声因子。 一种检测装置,应用于毫米波雷达,包括: 第一获取模块,用于获取回波信号对应的包括距离维和速度维的二维频谱,所述 二维频谱上至少包括相邻的第一检测目标和第二检测目标; 第二获取模块,用于获取所述第一检测目标对应的第一检测值和第一噪声因子, 根据预设的恒虚警概率和所述第一噪声因子获取所述第一检测目标对应的第一检测阈值; 判断模块,用于根据所述第一检测阈值判断所述第一检测目标是否存在; 检测模块,用于当所述第一检测目标存在时,将所述第一检测阈值替换所述第一 检测值作为所述第一检测目标的目标检测值,以检测所述第二检测目标是否存在。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现如上述的方法的步骤。 上述检测方法、装置、毫米波雷达、计算机可读存储介质,所述方法通过获取回波 信号对应的包括距离维和速度维的二维频谱,所述二维频谱上至少包括相邻的第一检测目 标和第二检测目标;获取所述第一检测目标对应的第一检测值和第一噪声因子,根据预设 的恒虚警概率和所述第一噪声因子获取所述第一检测目标对应的第一检测阈值;根据所述 第一检测阈值判断所述第一检测目标是否存在;当所述第一检测目标存在时,将所述第一 检测阈值替换所述第一检测值作为所述第一检测目标的目标检测值,以检测所述第二检测 目标是否存在。本申请通过第一检测阈值与第一检测值的关系来判断第一检测目标是否存 在,当判定第一检测目标存在时将第一检测值替换成第一检测阈值,即当第一检测目标存 在时将第一检测目标的第一检测值替换为噪声信号,并防止存在的第一检测目标干扰检测 第二检测目标存在与否的准确性;降低第二检测目标的漏检概率,从而提升毫米波雷达的 检测效率。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 5 CN 111610515 A 说 明 书 3/8 页 根据这些附图获得其他的附图。 图1为一个实施例中检测方法的流程图; 图2为一个实施例中步骤以检测第二检测目标是否存在的流程图; 图3为一个实施例中步骤根据第一检测值、第一噪声因子和第一检测阈值判断第 一检测目标是否存在的流程图; 图4为一个实施例中步骤获取第一检测目标对应的第一噪声因子的流程图; 图5a为回波信号对应的原始二维图谱示意图; 图5b是现有技术中标记检测目标后的二维频谱示意图; 图5c是一个实施例中标记检测目标后的二维频谱示意图; 图6为一个实施例中检测装置的结构框图; 图7为一个实施例中毫米波雷达的内部结构示意图。











