
技术摘要:
本发明公开了基于物联网的智能化建筑工程质量检测装置及其检测方法,包括主机架,所述主机架右侧的顶部转动连接有副机架,主机架的底端转动连接有移动轮,所述副机架的底端转动连接有转向轮,主机架设置有两个,本发明涉及工程检测技术领域。该基于物联网的智能化建筑 全部
背景技术:
建筑工程,指通过对各类房屋建筑及其附属设施的建造和与其配套的线路、管道、 设备的安装活动所形成的工程实体,其中“房屋建筑”指有顶盖、梁柱、墙壁、基础以及能够 形成内部空间,满足人们生产、居住、学习、公共活动需要的工程。建筑工程指通过对各类房 屋建筑及其附属设施的建造和与其配套的线路、管道、设备的安装活动所形成的工程实体, 其中“房屋建筑”指有顶盖、梁柱、墙壁、基础以及能够形成内部空间,满足人们生产、居住、 学习、公共活动需要的工程。工程检测是为保障已建、在建、将建的建筑工程安全,在建设全 过程中对与建筑物有关的地基、建筑材料、施工工艺、建筑结构进行测试的一项重要工作。 建筑工程的质检过程中,包含有对建筑表面裂缝进行检测的项目,混凝土在干燥 凝固后,或混凝土建筑受力过大后,其表面可能存在裂缝,严重时会影响建筑的安全性,因 此需要进行严格的探测,目前的检测方式大多还是人工用肉眼观察,配合检测仪器检测裂 缝的规格尺寸,但此种检测方式容易错过一些裂缝,检测不够精确,且手持检测装置较为沉 重,不便于使用。
技术实现要素:
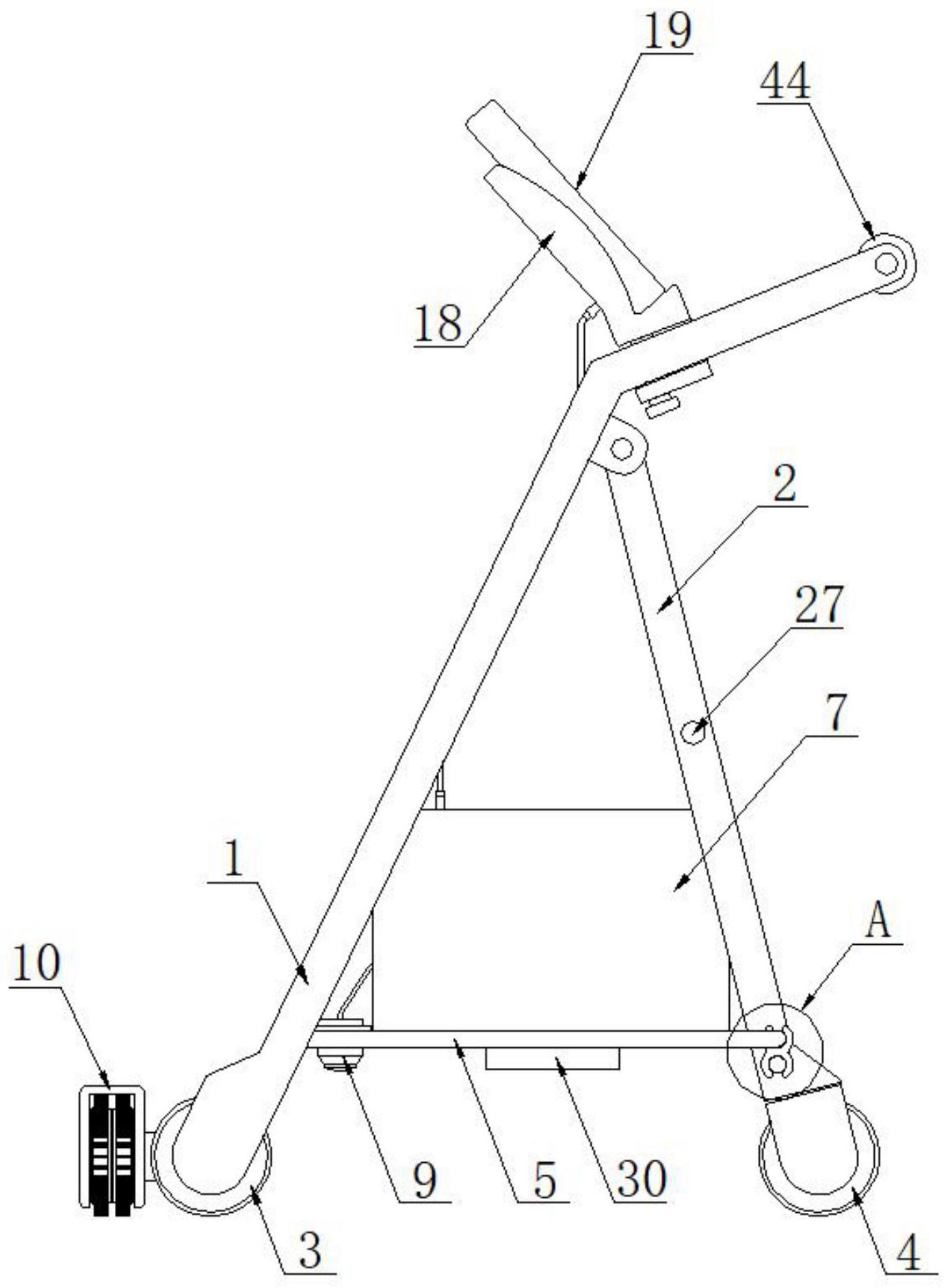
(一)解决的技术问题 针对现有技术的不足,本发明提供了基于物联网的智能化建筑工程质量检测装置及其 检测方法,解决了人工用肉眼观察,配合检测仪器检测裂缝的规格尺寸,容易错过一些裂 缝,检测不够精确,且手持检测装置较为沉重,不便于使用的问题。 (二)技术方案 为实现以上目的,本发明通过以下技术方案予以实现:基于物联网的智能化建筑工程 质量检测装置,包括主机架,所述主机架右侧的顶部转动连接有副机架,所述主机架的底端 转动连接有移动轮,所述副机架的底端转动连接有转向轮,所述主机架设置有两个,两个所 述主机架之间的底端转动连接有转动架,且转动架的内侧固定连接有支撑架,所述支撑架 的顶部放置有机箱,所述支撑架左侧的中间与转动架的内侧之间固定连接有安装环,且安 装环的内部卡接有摄像头,两个所述主机架相对的一侧且位于移动轮的水平位置固定连接 有传动框,所述移动轮中心轴的一端贯穿传动框并延伸至传动框的内部,所述移动轮中心 轴的表面且位于传动框的内部固定连接有第一锥齿轮,所述传动框内壁的左右两侧之间转 动连接有转轴,且转轴的表面固定连接有与第一锥齿轮相啮合的第二锥齿轮,两个所述转 轴的表面且远离第一锥齿轮的一端均固定连接有主动带轮,两个所述转轴的表面且位于主 动带轮的一侧均转动连接有从动带轮,且两个主动带轮的表面均通过传送带分别与两个从 动带轮传动连接,两个所述传送带的外表面分别固定连接有硬刷毛和软刷毛。 4 CN 111610252 A 说 明 书 2/6 页 优选的,两个所述主机架的顶部之间固定连接有连接梁,两个所述主机架之间且 位于连接梁的右侧固定连接有把手杆,所述连接梁的外部固定连接有显示屏座,且显示屏 座的顶部卡接有触摸显示屏。 优选的,所述显示屏座包括卡座,所述卡座底部的右侧固定连接有支撑块,且支撑 块的底部固定连接有夹板,所述夹板与连接梁之间贯穿有螺栓,且螺栓的顶端与卡座的底 部螺纹连接。 优选的,所述转动架右侧的中间开设有与副机架相适配的凹槽,所述副机架的内 部且位于转动架的底部贯穿连接有第一支撑杆,且转动架与第一支撑杆的外表面之间卡接 有第一卡套,两个所述主机架的中间段之间固定连接有固定杆,所述副机架的内部且与固 定杆相对应的位置贯穿连接有第二支撑杆,且固定杆与第二支撑杆的外表面之间卡接有第 二卡套。 优选的,所述机箱内腔的左侧固定连接有处理器,所述机箱内腔底部的右侧固定 连接有超声波探测器,所述超声波探测器的输出端延伸至支撑架的底部,所述机箱的内部 且位于处理器的右侧和超声波探测器的上方固定连接有隔板,且隔板的顶部固定连接有蓄 电池。 优选的,所述处理器通过导线分别与触摸显示屏和超声波探测器实现双向连接, 所述蓄电池和摄像头的输出端均通过导线与处理器的输入端电性连接,所述蓄电池的输出 端通过导线与超声波探测器的输入端电性连接。 优选的,所述处理器包括图像录入模块、裂缝警示测量单元、超声波探测系统、图 像成像模块和NB-IOT通讯模块,所述图像录入模块的输出端分别与裂缝警示测量单元和超 声波探测系统的输入端连接,所述裂缝警示测量单元和超声波探测系统的输出端均与图像 成像模块的输入端连接,所述图像成像模块的输出端与NB-IOT通讯模块的输入端连接。 优选的,所述裂缝警示测量单元包括颜色对比模块、裂缝特征识别模块、裂缝轮廓 标示模块、视觉长度计量模块、分叉坐标标记模块和裂缝警示模块,所述颜色对比模块的输 出端与裂缝特征识别模块的输入端连接,所述裂缝特征识别模块的输出端分别与裂缝轮廓 标示模块和裂缝警示模块的输入端连接,所述裂缝轮廓标示模块的输出端分别与视觉长度 计量模块和分叉坐标标记模块的输入端连接。 本发明还公开了基于物联网的智能化建筑工程质量检测装置的检测方法,具体包 括以下步骤: 步骤一、设备组装:将主机架和副机架展开,再将转动架展平,使其右侧搭在副机架的 第一支撑杆上,并使转动架上第一卡套扣住第一支撑杆,此时便可直接将机箱放在支撑架 上,将摄像头卡进安装环内,并将超声波探测器的输出端卡在支撑架内,然后将显示屏座卡 在连接梁上,用螺栓将其固定,并将触摸显示屏插进卡座内,最后用数据线将触摸显示屏连 接机箱便可完成安装; 步骤二、地面清理:手扶把手杆推动装置向前移动,移动时移动轮带动第一锥齿轮转 动,利用相互啮合的第二锥齿轮带动转轴转动,进而使两个移动轮分别带动两个主动带轮 反向转动,主动带轮转动时可配合从动带轮带动传送带转动,利用刷毛对地面进行清理; 步骤三、裂缝探测:移动过程中,摄像头实时对清理后的地面进行拍摄,并将数据传回 处理器内进行数据处理,处理器的图像录入模块录入图像后,将图像传输到裂缝警示测量 5 CN 111610252 A 说 明 书 3/6 页 单元,并触发超声波探测系统,裂缝警示测量单元的颜色对比模块对图像画面的场景颜色 进行处理,根据颜色的对比来突出显示裂缝,然后由裂缝特征识别模块对图像进行识别,当 识别到有符合的特征条件的则判断为裂缝,此时触发裂缝警示模块,并在触摸显示屏上闪 烁警示,同时由裂缝轮廓标示模块勾勒出裂缝的轮廓,同样在触摸显示屏上显示,操作者根 据轮廓图像操作装置顺着轮廓轨迹移动,视觉长度计量模块对裂缝的长度进行计量,超声 波探测器发出的超声波对裂缝的深度和宽度件准确计量,并对数据进行同步记录,再通过 NB-IOT通讯模块发送到主控制室。 优选的,所述颜色对比模块对图像画面的场景颜色进行处理时,先根据画面的光 亮度进行亮化或暗化调整,再进行锐化处理。 (三)有益效果 本发明提供了基于物联网的智能化建筑工程质量检测装置及其检测方法。与现有技术 相比,具备以下有益效果: (1)、该基于物联网的智能化建筑工程质量检测装置及其检测方法,通过在两个主机架 之间的底端转动连接有转动架,且转动架的内侧固定连接有支撑架,支撑架的顶部放置有 机箱,支撑架左侧的中间与转动架的内侧之间固定连接有安装环,且安装环的内部卡接有 摄像头,两个主机架相对的一侧且位于移动轮的水平位置固定连接有传动框,移动轮中心 轴的一端贯穿传动框并延伸至传动框的内部,移动轮中心轴的表面且位于传动框的内部固 定连接有第一锥齿轮,传动框内壁的左右两侧之间转动连接有转轴,且转轴的表面固定连 接有与第一锥齿轮相啮合的第二锥齿轮,两个转轴的表面且远离第一锥齿轮的一端均固定 连接有主动带轮,两个转轴的表面且位于主动带轮的一侧均转动连接有从动带轮,且两个 主动带轮的表面均通过传送带分别与两个从动带轮传动连接,两个传送带的外表面分别固 定连接有硬刷毛和软刷毛,通过设置摄像头来拍摄地面的细节画面,便于更精确的发现和 检测地面裂缝,而利用传动框及其内部传动件的配合,可带动主动带轮、从动带轮与传送带 实现传动,进而可利用传送带表面的硬刷毛和软刷毛清理地面,将摄像头前方地面上的干 扰物清理掉,避免影响裂缝检测,清理装置无需电动结构,只需推动装置即可,较为节能且 使用方便。 (2)、该基于物联网的智能化建筑工程质量检测装置及其检测方法,通过在主机架 右侧的顶部转动连接有副机架,主机架的底端转动连接有移动轮,副机架的底端转动连接 有转向轮,两个主机架之间的底端转动连接有转动架,且转动架的内侧固定连接有支撑架, 支撑架的顶部放置有机箱,转动架右侧的中间开设有与副机架相适配的凹槽,副机架的内 部且位于转动架的底部贯穿连接有第一支撑杆,且转动架与第一支撑杆的外表面之间卡接 有第一卡套,两个主机架的中间段之间固定连接有固定杆,副机架的内部且与固定杆相对 应的位置贯穿连接有第二支撑杆,且固定杆与第二支撑杆的外表面之间卡接有第二卡套, 利用主机架、副机架配合转动架和支撑架组成车体,可方便的搭载和移动机箱,大大方便了 检测工作,且主机架与副机架可折叠,并可利用第二卡套进行固定,减小其占用的空间,使 其便于运输存放,使用灵活方便。 (3)、该基于物联网的智能化建筑工程质量检测装置及其检测方法,通过在处理器 通过导线分别与触摸显示屏和超声波探测器实现双向连接,蓄电池和摄像头的输出端均通 过导线与处理器的输入端电性连接,蓄电池的输出端通过导线与超声波探测器的输入端电 6 CN 111610252 A 说 明 书 4/6 页 性连接,处理器包括图像录入模块、裂缝警示测量单元、超声波探测系统、图像成像模块和 NB-IOT通讯模块,图像录入模块的输出端分别与裂缝警示测量单元和超声波探测系统的输 入端连接,裂缝警示测量单元和超声波探测系统的输出端均与图像成像模块的输入端连 接,图像成像模块的输出端与NB-IOT通讯模块的输入端连接,裂缝警示测量单元包括颜色 对比模块、裂缝特征识别模块、裂缝轮廓标示模块、视觉长度计量模块、分叉坐标标记模块 和裂缝警示模块,颜色对比模块的输出端与裂缝特征识别模块的输入端连接,裂缝特征识 别模块的输出端分别与裂缝轮廓标示模块和裂缝警示模块的输入端连接,裂缝轮廓标示模 块的输出端分别与视觉长度计量模块和分叉坐标标记模块的输入端连接,通过设置摄像头 配合地面,并对拍摄图像进行处理,可识别出地面的裂缝,并进行警示,而利用触摸显示屏 显示画面,便于操作者推动装置顺着裂缝的轨迹移动,并可利用超声波探测系统探测裂缝 内部的深度和宽度,利用视觉长度计量模块计量裂缝的长度,便于得到更准确的尺寸数据, 同时在追踪检测过程中,还可利用分叉坐标标记模块对裂缝分叉的坐标进行标记,便于后 期继续探查,尽可能的保证不漏掉裂缝,保证了工程检测的质量。 附图说明 图1为本发明结构的主视图; 图2为本发明局部结构的俯视图; 图3为本发明传动框内部结构的俯视图; 图4为本发明主动带轮、从动带轮与转轴连接结构的示意图; 图5为本发明主机架与副机架折叠状态的示意图; 图6为本发明图1中A处的局部结构放大图; 图7为本发明显示屏座的结构示意图; 图8为本发明的系统原理框图; 图9为本发明处理器的原理框图; 图10为本发明裂缝警示测量单元的原理框图。 图中,1-主机架、2-副机架、3-移动轮、4-转向轮、5-转动架、6-支撑架、7-机箱、8- 安装环、9-摄像头、10-传动框、11-第一锥齿轮、12-转轴、13-第二锥齿轮、14-主动带轮、15- 从动带轮、16-传送带、17-连接梁、18-显示屏座、19-触摸显示屏、20-卡座、21-支撑块、22- 夹板、23-螺栓、24-第一支撑杆、25-第一卡套、26-固定杆、27-第二支撑杆、28-第二卡套、 29-处理器、30-超声波探测器、31-隔板、32-蓄电池、33-图像录入模块、34-裂缝警示测量单 元、35-超声波探测系统、36-图像成像模块、37-NB-IOT通讯模块、38-颜色对比模块、39-裂 缝特征识别模块、40-裂缝轮廓标示模块、41-视觉长度计量模块、42-分叉坐标标记模块、 43-裂缝警示模块、44-把手杆。











