
技术摘要:
本发明公开了一种智能耕种系统及其装置,其技术方案要点是包括有耕种区域采集模块,耕种区域采集模块用于采集并形成耕种区域,耕种作业端,耕种作业端用于在耕种区域内进行耕种操作,激光测距模块,激光测距模块位于耕种区域外,用于向耕种作业端发射感应激光,感应模 全部
背景技术:
我国是一个拥有13亿人口的农业大国,近年来我国的粮食问题越来越突显出来。 目前,我国全部农产品的自给率尚不足70%,近30%左右是通过从国际市场进口来来调节 的。数字触目惊心,形式严峻,作为一个农业大国,本国的粮食产量连本国人民都供应不上, 还需依靠进口来补充,长此以往,我们必将受制于人。我国传统农村动力数量正在急剧减 少,农村劳动力年龄结构偏大,导致农村用工成本上升、土地抛荒严重。农业生产技术和生 产效率无法提高,将成为城镇化建设的严峻障碍,威胁到国家的粮食安全和社会稳定。利用 现代科技技术,研发出农作物自动化生产系统,是国家经济社会进一步发展、城镇化建设进 程顺利进行,进一步解放农业劳动力,提高人民生活水平和质量的需要。 中国专利(公布号:CN104094805A)公开了一种可自动控制的温室耕种系统,该专 利主要设计了一种便捷的发电装置(实际是燃料电池),结合其输入输出端将电力、热能、水 等多项环境产物,再输入环境感控模块,提供作物生长所需的条件。这种系统设计,可部分 解放温室劳动力,提供生产效率。而实际上,农业生产更多的是在露天田地、山地,地形复 杂,场景多变。需要更加灵活耕种系统,能够适应更多应有场景,能够自主划分耕种区域并 且在耕种区域内自动耕种。
技术实现要素:
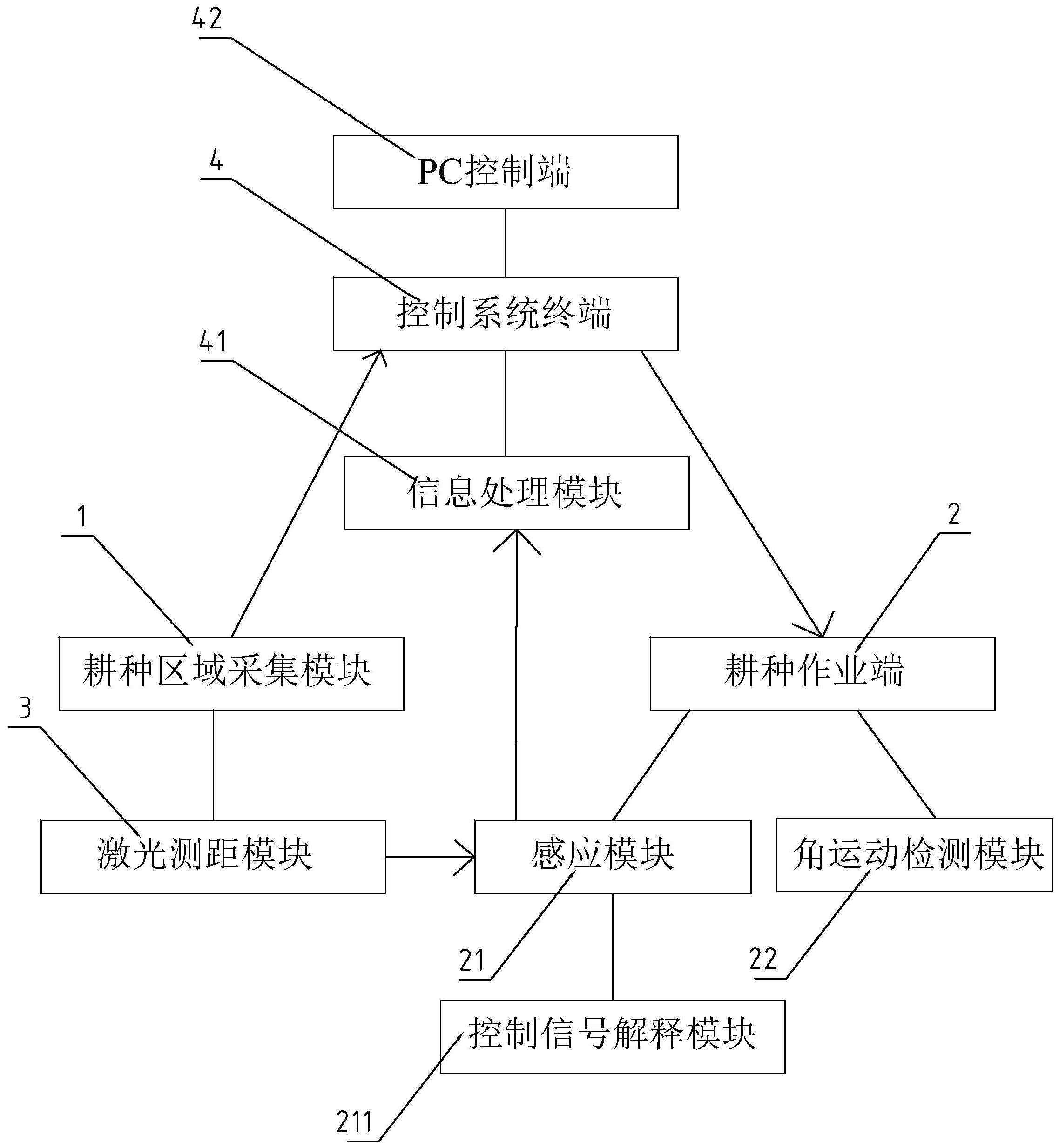
针对现有技术存在的不足,本发明的目的在于提供一种智能耕种系统及其装置, 该系统及其装置能够自主规划耕种区域,控制拖拉机在耕种区域内进行正确的耕种作业。 为实现上述目的,本发明提供了如下技术方案:一种智能耕种系统,包括有: 耕种区域采集模块,所述耕种区域采集模块用于采集并形成耕种区域; 耕种作业端,所述耕种作业端用于在耕种区域内进行耕种操作; 激光测距模块,所述激光测距模块位于耕种区域外,用于向耕种作业端发射感应 激光; 感应模块,所述感应模块设置于耕种作业端上,用于感应激光测距模块发射出来 的感应激光; 控制系统终端,所述控制系统终端内设置有用于为耕种作业端提供准确坐标信息 和区域大小信息的信息处理模块,所述感应模块将接受到感应激光的信息反馈至信息处理 模块,所述信息处理模块用于根据感应激光的信息确定耕种作业端的精确的坐标和实际距 离。 本发明进一步设置为:所述耕种区域采集模块包括有: 视频采集模块,所述视频采集模块用于采集耕种区域; 区域形成模块,所述区域形成模块根据视频采集模块采集的耕种区域形成供耕种 4 CN 111552281 A 说 明 书 2/6 页 作业端耕种区域。 本发明进一步设置为:所述视频采集模块包括有:主采集模块和副采集模块,所述 主采集模块和副采集模块呈对角位置设置,用于采集无死角的耕种区域; 所述耕种作业端在主采集模块和副采集模块、激光测距模块、感应模块配合工作 下进行实际耕种区域的耕种操作。 本发明进一步设置为:所述感应模块包括有: 控制信号解释模块,所述控制信号解释模块用于接收信息处理模块回馈的信号并 向耕种作业端发送操作指示: 耕种作业端在耕种区域采集模块视野内时,控制信号解释模块向耕种作业端发送 正常耕种操作指令; 耕种作业端不在耕种区域采集模块视野内时,控制信号解释模块向耕种作业端发 送停机操作指令。 本发明进一步设置为:所述控制系统终端包括有: PC控制端,所述PC控制端用于供耕种区域采集模块采集并形成图像投射于人机交 互界面,并供人画出耕种区域外形图。 本发明进一步设置为:所述耕种作业端上设置有角运动检测模块,所述角运动检 测模块用于检测耕种作业端行走过程中平稳度。 本发明进一步设置为:一种智能耕种装置,包括有呈对角线安装至地面上的第一 安装杆和第二安装杆、和用于耕种作业的拖拉机本体、以及将采集到的区域形成耕种区域 以及生成拖拉机本体行走路径的控制终端,所述第一安装杆上设置有用于采集耕种区域的 主摄像头,所述第二安装杆上设置有用于为主摄像头的死角区域提供位置坐标的辅助摄像 头; 所述拖拉机本体上设置有激光感应传感器,所述第一安装杆上设置有向激光感应 传感器发射感应激光的激光发射器,以及用于带动激光发射器始终向激光感应传感器发射 感应激光的步进电机,所述步进电机与控制终端电连接设置,所述激光感应传感器分别与 控制拖拉机本体转动方向的转向轮电机、和控制拖拉机本体行驶速度的行驶电机、以及控 制终端电连接设置。 本发明进一步设置为:所述激光感应传感器包括有呈柱状结构设置的第三安装杆 和若干安装于第三安装杆上的光敏电阻,所述光敏电阻呈圆柱形阵列排布设置于第三安装 杆的外侧壁上。 本发明进一步设置为:所述第一安装杆上设置有用于供使用者观看并操作的人机 交互器。 本发明进一步设置为:所述拖拉机本体上设置有用于检测拖拉机本体在行走过程 中平稳性的陀螺仪,所述拖拉机本体上设置有控制耕地深浅的电动推杆。 综上所述,本发明具有以下有益效果:通过耕种区域采集模块能够进行自动规划 耕种区域,并形成合适的耕种路线,通过控制系统终端为耕种作业端提供准确坐标信息和 区域大小信息,并且在耕种作业端在耕种过程中通过激光测距模块和感应模块实时为耕种 作业端提供精准的坐标信息、距离信息,从而保证耕种作业端能够实时按照规划的耕种路 线进行耕种操作,除此之外该系统还能够适用于各种不同的地形、地区,适用范围广,操作 5 CN 111552281 A 说 明 书 3/6 页 方便的优点。 附图说明 图1为智能耕种系统的结构框图; 图2为耕种区域采集模块的结构框图; 图3为智能耕种系统和装置的流程框图; 图4为耕种装置的立体结构示意图; 图5为拖拉机本体的立体结构示意图。 附图标记:1、耕种区域采集模块;11、视频采集模块;111、主采集模块;112、副采集 模块;12、区域形成模块;2、耕种作业端;21、感应模块;211、控制信号解释模块;22、角运动 检测模块;3、激光测距模块;4、控制系统终端;41、信息处理模块;42、PC控制端;5、第一安装 杆;51、主摄像头;52、激光发射器;53、步进电机;54、人机交互器;6、第二安装杆;61、辅助摄 像头;7、拖拉机本体;71、激光感应传感器;711、第三安装杆;712、光敏电阻;72、发电机;73、 转向轮电机;74、电动推杆。











