
技术摘要:
本发明提供了一种反光柱跟踪定位方法、装置及电子设备,包括:当激光雷达检测到当前时刻的数据信息时,根据预先获取的激光雷达在当前时刻的前两个时刻的位姿信息预测得到激光雷达当前时刻的预测位姿;其中,数据信息包括当前时刻检测到的反光柱在激光雷达坐标系下的初 全部
背景技术:
在现代制造业中,生产阶段自动化因其可以显著提高生产效率、降低成本,其重要 性与日俱增。自动导引车(Automated Guided Vehicle,AGV)作为自动化生产中的运输工 具,AGV的导航定位也收到广泛关注。常见的工业AGV导航定位方式包括磁导航、自然导航 (视觉SLAM或激光SLAM)、地标导航(二维码或RFID标签等)、激光导航(反光柱)等。其中基于 反光柱(或称有反)激光导航由于其定位精度高、维护成本低、安装成本相对较低、AGV的路 径规划柔性高等优点在叉车AGV上获得了大量应用。但是,现有的反光柱激光雷达定位算法 在定位过程中时,通常采用基于反光柱间欧氏距离在全局坐标系与雷达坐标系内不变的原 理,进行反光柱与全局地标地图的匹配搜索,进行全局搜索时未有效利用激光雷达位姿先 验信息,全局匹配搜索计算量较大,速度较慢。
技术实现要素:
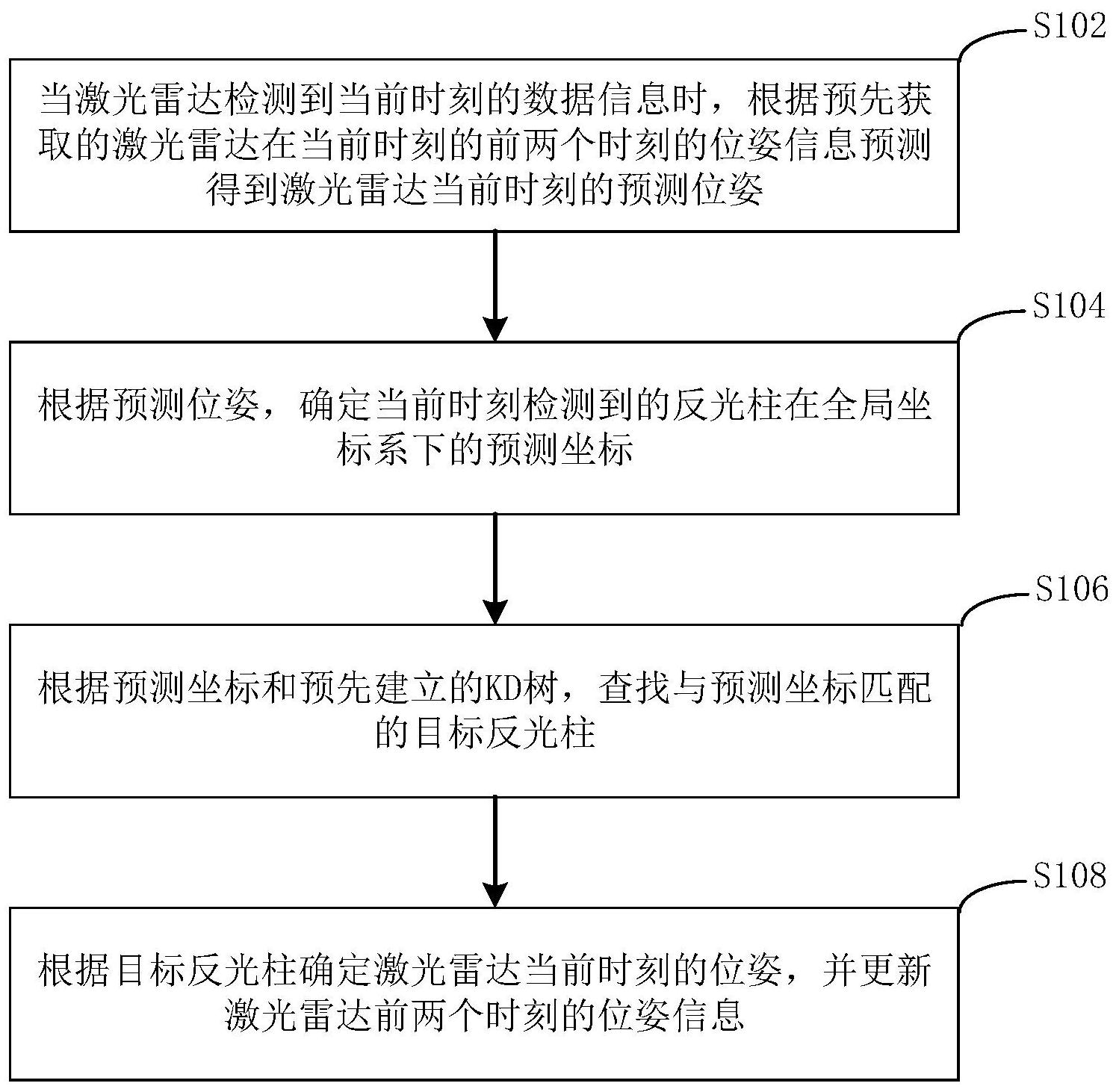
有鉴于此,本发明的目的在于提供一种反光柱跟踪定位方法、装置及电子设备,以 减少计算量,提高激光雷达当前时刻位姿的解算速度。 第一方面,本发明实施例提供了一种反光柱跟踪定位方法,包括:当激光雷达检测 到当前时刻的数据信息时,根据预先获取的激光雷达在当前时刻的前两个时刻的位姿信息 预测得到激光雷达当前时刻的预测位姿;其中,数据信息包括当前时刻检测到的反光柱在 激光雷达坐标系下的初始坐标;根据预测位姿,确定当前时刻检测到的反光柱在全局坐标 系下的预测坐标;根据预测坐标和预先建立的KD树,查找与预测坐标匹配的目标反光柱;其 中,KD树为预先根据全局地标图中所有反光柱的位置信息建立的;根据目标反光柱确定激 光雷达当前时刻的位姿,并更新激光雷达前两个时刻的位姿信息。 在一种实施方式中,根据预测位姿,确定当前时刻检测到的反光柱在全局坐标系 下的预测坐标的步骤,包括:根据预测位姿确定转换矩阵;根据转换矩阵将初始坐标转换为 当前时刻检测到的反光柱在全局坐标系下的预测坐标。 在一种实施方式中,根据转换矩阵将初始坐标转换为当前时刻检测到的反光柱在 全局坐标系下的预测坐标的步骤,包括:按照如下公式计算预测坐标: Xglobal=T·Xlocal 其中,Xglobal表示预测坐标的齐次坐标矩阵,Xlocal表示初始坐标的齐次坐标矩阵,T 表示转换矩阵。 在一种实施方式中,根据预测坐标和预先建立的KD树,查找与预测坐标匹配的目 标反光柱的步骤,包括:根据预先建立的KD树在全局地标图中进行最邻近搜索,确定预测坐 标的邻近坐标;计算预测坐标与邻近坐标之间的距离;判断距离是否小于阈值,如果小于, 4 CN 111596299 A 说 明 书 2/9 页 将邻近坐标对应的反光柱确定为目标反光柱。 在一种实施方式中,当激光雷达检测到当前时刻的数据信息时,根据预先获取的 激光雷达在当前时刻的前两个时刻的位姿信息预测得到激光雷达当前时刻的预测位姿的 步骤,包括:根据预先获取的激光雷达在当前时刻的前两个时刻的位姿信息,基于一阶欧拉 法得到激光雷达当前时刻的预测位姿。 在一种实施方式中,激光雷达的载体的移动速度小于预设值,且载体保持匀速运 动;载体包括AGV小车。 第二方面,本发明实施例提供了一种反光柱跟踪定位装置,包括:预测位姿确定模 块,用于当激光雷达检测到当前时刻的数据信息时,根据预先获取的激光雷达在当前时刻 的前两个时刻的位姿信息预测得到激光雷达当前时刻的预测位姿;其中,数据信息包括当 前时刻检测到的反光柱在激光雷达坐标系下的初始坐标;坐标转换模块,用于根据预测位 姿,确定当前时刻检测到的反光柱在全局坐标系下的预测坐标;查找模块,用于根据预测坐 标和预先建立的KD树,查找与预测坐标匹配的目标反光柱;其中,KD树为预先根据全局地标 图中所有反光柱的位置信息建立的;更新模块,用于根据目标反光柱确定激光雷达当前时 刻的位姿,并更新激光雷达前两个时刻的位姿信息。 在一种实施方式中,坐标转换模块还用于根据预测位姿确定转换矩阵;根据转换 矩阵将初始坐标转换为当前时刻检测到的反光柱在全局坐标系下的预测坐标。 第三方面,本发明实施例提供了一种电子设备,包括处理器和存储器,存储器存储 有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现上述第一 方面提供的任一项的方法的步骤。 第四方面,本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质 上存储有计算机程序,计算机程序被处理器运行时执行上述第一方面提供的任一项的方法 的步骤。 本发明实施例提供的上述反光柱跟踪定位方法、装置及电子设备,包括:当激光雷 达检测到当前时刻的数据信息(当前时刻检测到的反光柱在激光雷达坐标系下的初始坐 标)时,根据预先获取的激光雷达在当前时刻的前两个时刻的位姿信息预测得到激光雷达 当前时刻的预测位姿;然后根据预测位姿,确定当前时刻检测到的反光柱在全局坐标系下 的预测坐标;之后根据预测坐标和预先建立的KD树(KD树为预先根据全局地标图中所有反 光柱的位置信息建立的),查找与预测坐标匹配的目标反光柱;最后根据目标反光柱确定激 光雷达当前时刻的位姿,并更新激光雷达前两个时刻的位姿信息。上述方法能够利用激光 雷达当前时刻的前两个时刻的位姿预测得到当前时刻激光雷达的位姿,计算量较小;同时, 上述方法能够根据反光柱全局坐标预先建立KD树用于后续反光柱的查找,基于KD树能够快 速查找到匹配的反光柱,从而能够减少计算量,进一步提高激光雷达当前时刻位姿的解算 速度。 本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变 得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书 以及附图中所特别指出的结构来实现和获得。 为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 5 CN 111596299 A 说 明 书 3/9 页 附图说明 为了更清楚地说明本发明











