
技术摘要:
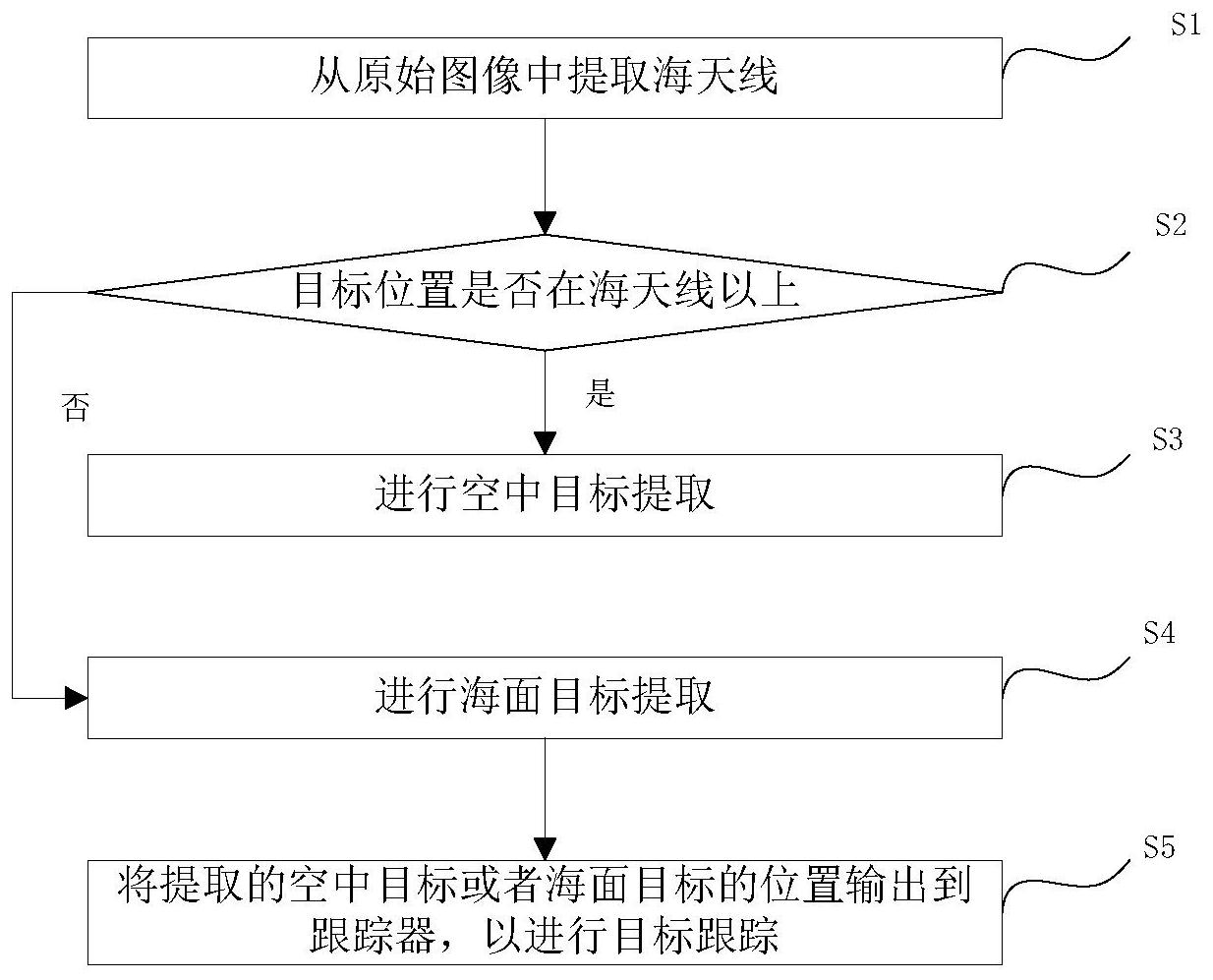
本发明公开了一种海空背景下红外弱小目标自适应跟踪算法切换方法,包括以下步骤:S1、从原始图像中提取海天线;S2、判断目标位置是否在海天线以上;S3、若目标位置在海天线以上,则进行空中目标提取;S4、若目标位置在海天线以下,则进行海面目标提取。本发明通过判断 全部
背景技术:
对弱小目标(远程飞机、导弹等)进行跟踪过程中,弱小目标从空中运动到海天线 附近然后到达海面背,背景变化单一跟踪算法很难满足需求,导致目标跟踪失败。现有目标 跟踪系统,常采用单一跟踪算法或者采用手动切换跟踪算法。空中背景和海面背景不同,采 用单一固定跟踪算法不能同时解决不同背景下弱小目标的稳定跟踪。手动切换跟踪算法反 应不及时,或者不能针对跟踪过程中背景变化自适应切换跟踪算法,常常导致跟踪过程失 败。
技术实现要素:
本发明的目的是通过多种目标跟踪算法,跟踪不同背景自适应切换算法,从而实 现稳定跟踪目标。 本发明为达目的所采用的技术方案是: 提供一种海空背景下红外弱小目标自适应跟踪算法切换方法,包括以下步骤: S1、从原始图像中提取海天线; S2、判断目标位置是否在海天线以上; S3、若目标位置在海天线以上,则进行空中目标提取; S4、若目标位置在海天线以下,则进行海面目标提取; 其中, S3具体包括步骤: S31、对原始图像f(i,j)作5*5高斯滤波得到滤波图像g(i,j),g(i,j)=f(i,j)*H, 其中: S32、对滤波后的图像进行二值化分割,得到空中目标分割图像D(i ,j) , 其中T为目标分割阈值, 为滤波图像g(i,j) 的均值,k为系数,取值2-5,Var为滤波图像g(i,j)的方差; S4具体包括步骤: S41、先对原始图像f(i,j)作膨胀处理,再做作腐蚀处理,得到图像g1(i,j); S42、对处理后的图像进行二值化分割,得到海面目标分割图像D1 (i ,j), 4 CN 111598922 A 说 明 书 2/6 页 其中T1为目标分割阈值, 为图像 g1(i,j)的均值,k为系数,取值2-5,Var1为图像g1(i,j)的方差。 接上述技术方案,步骤S41中对原始图像作膨胀处理时,具体在3*3区域内求取灰 度最大;作腐蚀处理时,具体在3*3范围内求取灰度最小。 接上述技术方案,步骤S1具体包括: S11、获取原始图像以及初始海天线位置测角值A0; S12、计算原始图像的每一行灰度均值; S13、寻找相邻两行灰度差值最大值,并读取此位置的测角值A1; S14、判断测角值A1与初始海天线位置测角值A0的差是否小于一定阈值,若是,则 检测得到的海天线正确,若否,则回到步骤S11。 接上述技术方案,该方法还包括步骤: 将提取的空中目标或者海面目标的位置输出到跟踪器,以进行目标跟踪。 本发明还提供了一种海空背景下红外弱小目标自适应跟踪算法切换系统,包括: 海天线提取模块,用于从原始图像中提取海天线; 目标判断模块,用于判断目标位置是否在海天线以上; 空中目标提取模块,用于目标位置在海天线以上时,进行空中目标提取; 海面目标提取模块,用于目标位置在海天线以下时,进行海面目标提取; 其中, 空中目标提取模块具体用于: 对原始图像f(i,j)作5*5高斯滤波得到滤波图像g(i,j),g(i,j)=f(i,j)*H,其 中: 对滤波后的图像进行二值化分割 ,得到空中目标分割图像 D ( i ,j ) , 其中T为目标分割阈值, 为滤波图像g(i , j)的均值,k为系数,取值2-5,Var为滤波图像g(i,j)的方差; 海面目标提取模块具体用于: 先对原始图像f(i,j)作膨胀处理,再做作腐蚀处理,得到图像g1(i,j); 对处理后的图像进行二值化分割,得到海面目标分割图像D1 (i ,j) , 其中T1为目标分割阈值, 为图 像g1(i,j)的均值,k为系数,取值2-5,Var1为图像g1(i,j)的方差。 接上述技术方案,海天线提取模块具体用于: 获取原始图像以及初始海天线位置测角值A0; 5 CN 111598922 A 说 明 书 3/6 页 计算原始图像的每一行灰度均值; 寻找相邻两行灰度差值最大值,并读取此位置的测角值A1; 判断测角值A1与初始海天线位置测角值A0的差是否小于一定阈值,若是,则检测 得到的海天线正确。 接上述技术方案,该系统还包括目标位置输出模块,用于将提取的空中目标或者 海面目标的位置输出到跟踪器,以进行目标跟踪。 本发明还提供了一种计算机存储介质,其内存储有可被处理器执行的计算机程 序,该计算机程序执行上述技术方案的海空背景下红外弱小目标自适应跟踪算法切换方 法。 本发明产生的有益效果是:本发明通过海天线检测判断当前目标处于何种背景, 用以自动切换目标检测跟踪算法。空中弱小目标提取通过高斯滤波预滤除云层等背景对目 标的影响,海面弱小目标提取通过膨胀腐蚀预处理滤除海杂波对目标的影响,从而准确实 现海空背景下对弱小目标的稳定检测与跟踪。 附图说明 下面将结合附图及实施例对本发明作进一步说明,附图中: 图1是本发明实施例海空背景下红外弱小目标自适应跟踪算法切换方法流程图; 图2是空中目标提取的具体流程图; 图3是海面目标提取的具体流程图; 图4是提取海天线的具体流程图; 图5是本发明另一实施例的海空背景下红外弱小目标自适应跟踪算法切换方法流 程图; 图6是本发明实施例海空背景下红外弱小目标自适应跟踪算法切换系统结构示意 图。











