
技术摘要:
本发明涉及起重机吊装机构领域,具体涉及一种具有平衡稳定性能的起重机吊装机构的工作方法,包括角度卡紧机构、四个挂环、钢绳、挂钩、受力调节器、水平调节机构和两个实心方管,两个实心方管呈上下分布,四个受力调节器分别固定安装在四个水平调节机构的底部,该具有 全部
背景技术:
吊装是指吊车或者起升机构对设备的安装、就位的统称,常规的吊装机构是通过 将工件的四端与钢绳连接,再通过钢绳与吊机上的挂钩进行连接,进而使得工件被吊起,而 通过这种吊装的方法,往往会使得工件的重心与挂钩重心不在一条垂直线上,长期以往,将 会使得吊机被损坏,进而产生大量的吊机维修成本。 我国专利申请号:CN201811071885.9 ;公开了一种起重设备吊装工具,本发明实 用性能高,结构简单,操作方便,便于对纵梁进行调节,且便于对纵梁进行固定,从而使得吊 装设备时,不易发生晃动,方便人们使用。 我国专利申请号:CN201520430816.8;公开了一种起重设备吊装工具,本实用新型 以吊环部件为中心,通过在吊环部件的两侧对称设置多个吊装纵梁,在吊装纵梁上套装吊 爪卡具,工作时,吊爪卡具抓取被吊装的设备,吊钩与吊环相钩,在吊钩的拉力作用下,起重 设备吊装工具对设备施加垂直方向上平衡的拉力,避免了被吊装的设备发生损坏。 该两个方案具有以下缺点: 1、该两个方案虽然都能够调节挂取设备的位置,但两个吊装横梁距离吊环的位置需要 人工进行测量和定位,才能够保证吊装横梁到吊环的距离相等,使得工件重心在吊环竖直 向下的轴线上,浪费了工人的大量工作时间。 2、该两个方案虽然都能够调节挂取设备的位置,且通过调节吊装横梁与吊环的位 置相等,保证了工件重心在吊环竖直向下的轴线上,但遇到工件四端的重量不同时,需要工 人调节四个吊装卡具之间的距离,这个过程过于危险,使得工人工作速度底,工人工作危险 性高。不利于工人的施工。
技术实现要素:
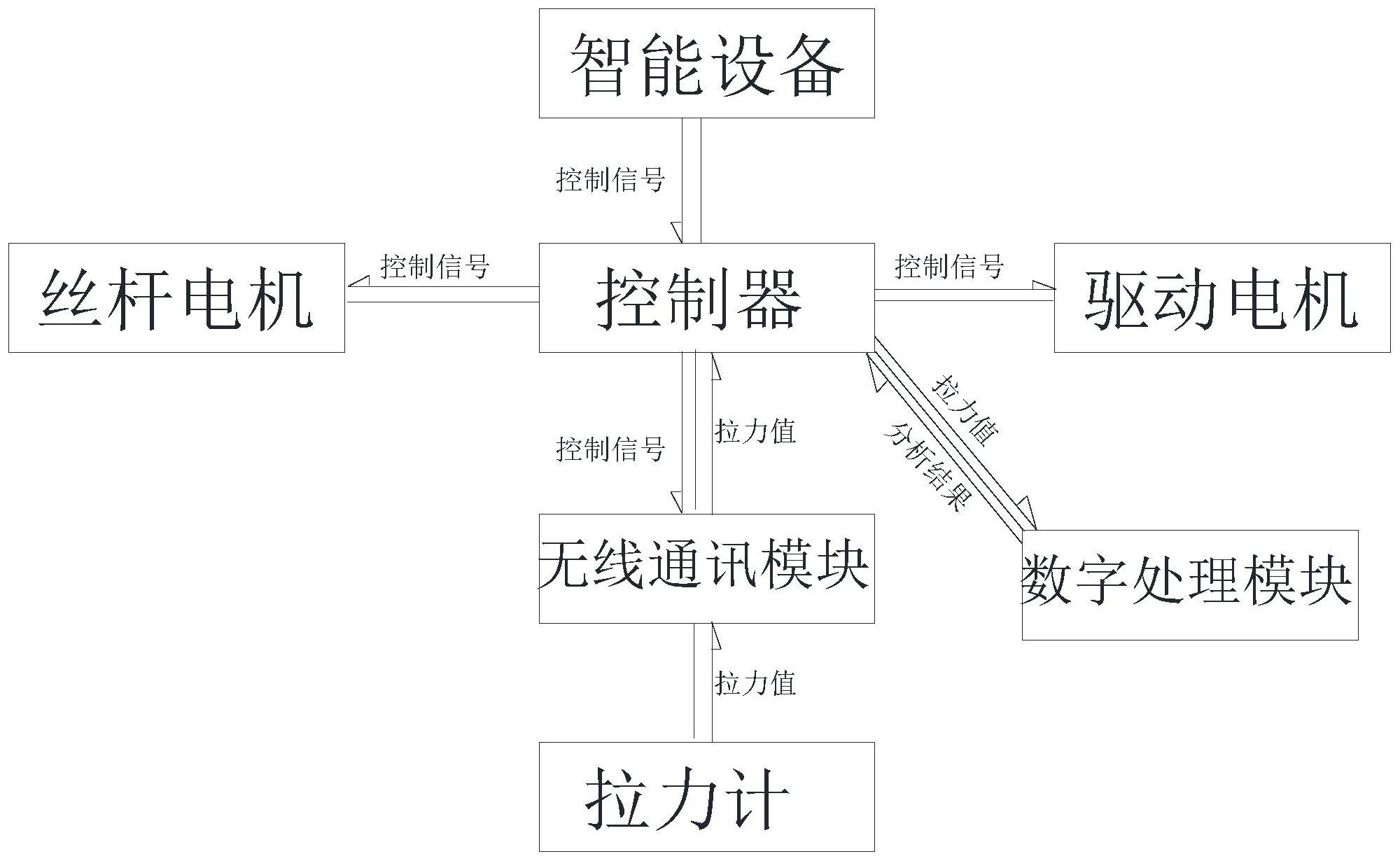
本发明的目的在于提供一种具有平衡稳定性能的起重机吊装机构及工作方法。 为达此目的,本发明采用以下技术方案: 一种具有平衡稳定性能的起重机吊装机构的工作方法,其特征在于, S1:工件的固定; 当需要对工件进行吊起时,首先通过四个吊环对工件的四角进行固定,使得方形容纳 管沿着实心方管进行滑动,两个实心方管之间形成适当的夹角; S2:受力调节器位置固定; 通过工人拧动螺钉,进而使得螺钉与滑移管上的螺纹孔进行啮合,进而使得螺钉带动 4 CN 111606183 A 说 明 书 2/7 页 压板向下运动,使得压板压紧在方形滑槽的槽底; S3:圆管的位置自调节; 两个实心方管进行转动的过程中,两个实心方管的夹角变化,进而使得位于两个实心 方管之间锐角处的圆管被两个实心方管推动,通过抵触弹簧的弹力作用,使得圆管被两个 实心方管推动后,圆管保持不动,位于两个实心方管之间钝角处的圆管,将由于抵触弹簧的 弹力而被推动,进而完成两个圆管的定位; S4:圆管的位置固定; 当两个圆管的位置定位好后,通过工人使用智能设备控制控制器工作,控制器控制丝 杆电机进行工作,进而使得丝杆电机带动方形丝杆螺母朝向丝杆电机进行运动,进而使得 方形丝杆螺母带动两个第一铰接座进行运动,进而使得两个第一铰接座通过铰接杆带动第 二铰接座进行运动,进而使得第二铰接座带动两个夹板做相互靠近的运动,进而使得两个 夹板压紧在两个侧板的外壁上,进而完成圆管的位置固定; S5:拉力值传送; 通过工人使用智能设备控制控制器开始工作,进而使得控制器控制吊机开始工作,进 而使得吊机带动挂钩和钢绳向上运动,进而使得四个受力调节器向上运动,进而使得受力 调节器带动吊环和工件向上运动,当工件离开地面后,四个拉力计上将显示出所承受的拉 力,每个拉力计均通过无线通信模块将信号传送给控制器,控制器内设置有数字处理模块, 控制器将四个拉力值均传送给数字处理模块; S6:受力调节; 数字处理模块对四个拉力值进行分析处理,进而筛选出数值最大的结果,进而将分析 结果传输给控制器,控制器控制相应的收卷机构进行工作,进而使得相应的收卷机构收卷 调节绳,使得工件倾斜,改变工件的重心,从而使得拉力计上的数值降低,拉力值进行实时 传输,且进行实时处理,进而调节至四个拉力计上的数值上下偏差到达事先的设定值,控制 器再将结果传输给智能设备,工人再通过智能设备进行下一步工作。 本发明的有益效果:该具有平衡稳定性能的起重机吊装机构,通过两个实心方管 的中部铰接,保证了工件四端重量相同时,工件的中心在吊环竖直向下的轴线上,且通过角 度卡紧机构对两个实心方管进行自动卡紧,节约了工人的大量工作时间,且通过受力调节 器对工件四端受力进行自动调节,替代了工人调节的方法,保证了工人施工的安全性,提高 了工人的工作速度,有利于工人的施工。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使 用的附图作简单地介绍。 图1为本发明的信息流程图; 图2为本发明的立体结构示意图; 图3为本发明的局部立体结构分解示意图; 图4为角度卡紧机构的立体结构示意图; 图5为角度卡紧机构的局部立体结构示意图一; 5 CN 111606183 A 说 明 书 3/7 页 图6为角度卡紧机构的圆管; 图7为角度卡紧机构的局部立体结构示意图二; 图8为图7的A处局部放大图; 图9为夹紧器的立体结构示意图; 图10为本发明的立体结构分解示意图; 图11为水平调节机构的立体分解结构示意图; 图12为水平调节机构的局部立体分解结构示意图; 图13为实心方管的俯视图; 图14为收卷机构的立体分解结构示意图; 图中: 1、实心方管;1a、方形滑槽;1b、第四防滑纹;1c、限位环; 2、角度卡紧机构;2a、夹紧器;2a1、平板;2a2、丝杆电机;2a3、电机架;2a4、轴承座;2a5、 方形丝杆螺母;2a6、夹板;2a61、第二防滑纹;2a7、第一铰接座;2a8、第二铰接座;2a9、固定 座;2a10、滑座;2a11、滑轨;2b、弹性推动机构;2b1、侧板;2b11、第一防滑纹;2b2、第一抵板; 2b3、第二抵板;2b4、抵触弹簧;2c、圆管;2d、条形滑块;2e、滑板;2h、安装板;2h1、条形滑槽; 3、挂环; 4、钢绳; 5、挂钩; 6、受力调节器;6a、收卷机构;6a1、定位环;6a2、轴承;6a3、第二转轴;6a4、收卷轮;6a5、 方形容纳管;6a6、十字安装板;6a7、减速机;6a8、驱动电机;6b、调节绳;6c、拉力计; 7、水平调节机构;7a、滑移管;7b、压板;7b1、第三防滑纹;7c、连接杆;7d、下压器;7d1、 螺钉;7d2、圆形挡块;7d3、卡座; 8、吊环; 9、转动架;9a、第一转轴;9b、底板;9c、顶板。











