
技术摘要:
本发明公开了用于抓取中包药盒的机械手夹爪装置,包括用于夹取中包药盒的夹爪机构、安装在夹爪机构上的支撑框架、用于驱动夹爪机构运动的驱动机构;支撑框架滑动安装在连接板上;驱动机构包括驱动电机、主动带轮组、从动带轮组、滑动安装在主动带轮组上的驱动块和弹簧 全部
背景技术:
药品外包装以纸盒形式为主,其外形基本都是长方体,方便装箱。目前药厂中,药 品装入药盒,再将药盒(即中包药盒)装入纸箱内封好打包后再出厂,传统的装箱操作都是 人工将多个药盒手动放入纸箱并排列好,人工劳动强度大,装箱效率低下。市面上也有一些 采用输送带输送方式,但是都是半自动生产线,需要人员在中间进行辅助操作,耗费较多的 人力物力。 因此,基于上述技术问题,需要研发出一种用于抓取中包药盒的配合机器人实现 自动装箱的装置。
技术实现要素:
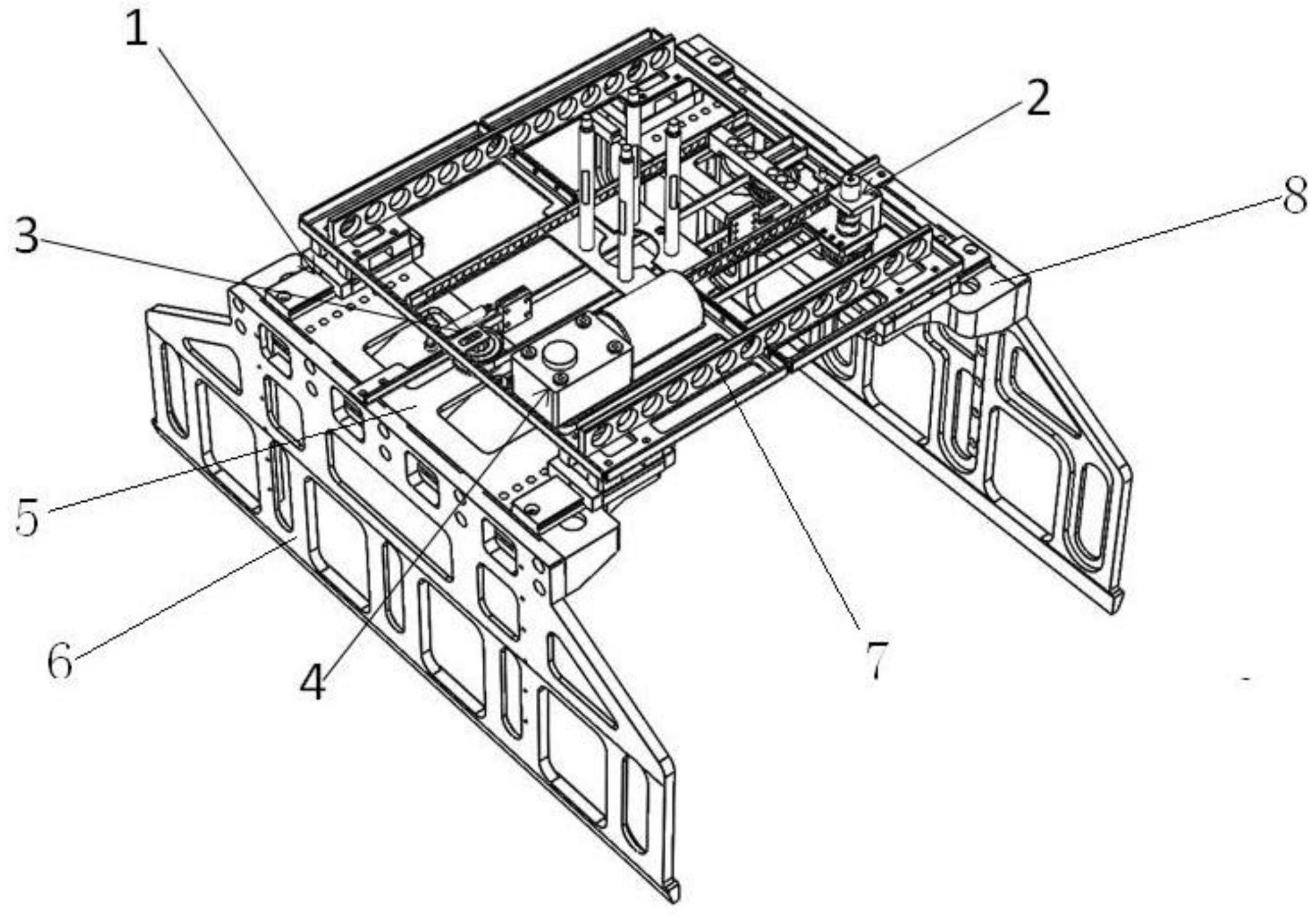
本发明的目的是提供一种结构简单、操作简单、能够克服产品公差、生产效率高的 用于抓取中包药盒的机械手夹爪装置及其使用方法。 本发明的技术方案如下: 一种用于抓取中包药盒的机械手夹爪装置,包括用于夹取中包药盒的夹爪机构、 安装在夹爪机构上的支撑框架、用于驱动夹爪机构运动的驱动机构; 所述夹爪机构包括两个夹爪,每个夹爪的顶部均安装有连接板,所述连接板的顶 部两端对称安装有两个直线滑轨,且在每块连接板的顶部中间各安装有一支撑片,所述支 撑片的一端与连接板连接,另一端形成有与驱动机构相配合的滑动件,用于在所述驱动机 构的作用下带动夹爪运动; 所述支撑框架滑动安装在所述连接板上,所述支撑框架底部对称设有与所述直线 滑轨配合滑动的滑块以使所述夹爪机构沿直线滑轨移动; 所述驱动机构包括驱动电机、主动带轮组、从动带轮组、滑动安装在主动带轮组上 的驱动块和弹簧挂钩,所述驱动电机安装在支撑架上,所述主动带轮组与从动带轮组的带 轮分别安装在支撑框架上,且该主动带轮组与从动带轮组平行设置,所述驱动电机的输出 轴与主动带轮组连接,所述弹簧挂钩设置在所述驱动块的一侧,每个所述夹爪上的滑动件 分别与从动带轮组滑动配合,在驱动电机的驱动下,驱动块沿主动同步带滑动而带动弹簧 挂钩移动钩住一个连接板,驱动滑动安装在从动同步带上的另一个连接板同步相对移动, 以使两个夹爪沿直线滑轨相对运动而夹紧药盒。 在上述技术方案中,所述夹爪包括第一夹爪和第二夹爪,所述第一夹爪的顶部安 装有第一连接板,所述第一连接板的顶部中间安装第一支撑片,所述第一支撑片的一端与 第一连接板连接,另一端形成有与从动带轮组相配合的第一滑动件,所述第二夹爪的顶部 安装有第二连接板,所述第二连接板的顶部中间安装有第二支撑片,所述第二支撑片的一 4 CN 111591505 A 说 明 书 2/5 页 端与第二连接板连接,另一端形成有与从动带轮组相配合的第二滑动件。 在上述技术方案中,所述主动带轮组包括两个主动带轮和安装在主动带轮之间的 主动同步带,两个所述主动带轮安装在所述支撑框架上,其中一个所述主动带轮与所述驱 动电机的输出轴连接,另一个所述主动带轮与编码器连接。 在上述技术方案中,所述从动带轮组安装在所述支撑框架的中轴线上,所述从动 带轮组包括两个从动带轮与安装在从动带轮之间的从动同步带,两个所述从动带轮对称安 装在所述支撑框架上。 在上述技术方案中,所述第一滑动件滑动安装在从动同步带的一侧,所述第二滑 动件滑动安装在从动同步带的另一侧,以使所述第一滑动件与第二滑动件交错设置来分别 带动两个所述夹爪的相对运动。 在上述技术方案中,所述弹簧挂钩包括筒体、弹簧和挂钩,所述弹簧安装在所述筒 体内,所述挂钩对称安装在弹簧的两端,且该挂钩设置在所述筒体的外侧,所述筒体固装在 驱动块靠近从动同步带的一侧。 在上述技术方案中,所述滑块与支撑框架之间安装有过渡件。 在上述技术方案中,所述支撑框架上安装有多个加固板以用于加固支撑框架。 在上述技术方案中,每个所述夹爪与连接板之间设有多个加强筋以用于增强安装 强度。 在上述技术方案中,所述支撑框架的顶部形成有连接件以用于与外部的机械手连 接。 本发明的另一个目的是提供一种基于机械手夹爪装置的使用方法,包括以下步 骤: (1)启动驱动电机,驱动电机驱动主动带轮转动,驱动块和弹簧挂钩沿在主动同步 带的作用下朝向第二连接板8的方向运动,直至弹簧挂钩钩住第二连接板8; (2)驱动电机反转带动驱动块向后移动,弹簧挂钩钩住第二连接板8朝向第一连接 板的方向运动,并且第一连接板上的第一滑动件及第二连接板上的第二滑动件在从动同步 带上相对运动,从而带动第一夹爪与第二夹爪相对运动; (3)两个夹爪相对运动过程中遇到中包药盒后被动停止,弹簧产生形变而提供夹 紧力,从而使得第一夹爪与第二夹爪抓取夹紧待转运的中包药盒。 本发明具有的优点和积极效果是 1.在驱动电机的作用下使得驱动块带着弹簧挂钩运动,挂钩钩住连接板后在从动 同步带的作用下带动连接板沿直线滑轨运动,以使两个夹爪相对运动而夹紧中包药盒,实 现精准抓取中包药盒,与传统的手动抓取方式相比,有效降低工作人员劳动强度,生产效率 高。 2.在两个夹爪相对运动时,弹簧产生的形变为夹紧提供夹紧力,并且能够克服产 品的公差,提高抓取的精准度。 3.连接板与夹爪之间设置的多个加强筋以提高夹爪的连接强度,本发明的支撑框 架能够与外部的机械手配合,配合机器人实现自动装箱,大幅度提高生产效率。 5 CN 111591505 A 说 明 书 3/5 页 附图说明 图1是本发明的机械手夹爪装置的结构示意图; 图2是本发明的机械手夹爪装置的仰视图; 图3是本发明中夹爪机构的结构示意图; 图4是本发明中夹爪机构的结构示意图; 图5是本发明中支撑框架的结构示意图(安装有驱动电机的一半支撑框架); 图6是本发明中支撑框架的结构图(安装有编码器的另一半支撑框架); 图7是本发明中直线滑轨的结构示意图。 图中: 1、直线滑轨 2、编码器 3、从动带轮 4、驱动电机 5、第一连接板 6、第一夹爪 7、加固板 8、第二连接板 9、第一支撑片 10、第一滑动件 11、从动同步带 12、支撑框架 13、滑块 14、主动带轮 15、过渡件 16、加强筋 17、主动同步带 18、驱动块 19、弹簧挂钩 20、第二夹爪 21.第二滑动件











