
技术摘要:
本发明公开一种移动机器人所处位置确定方法及系统,方法包括:利用移动机器人的二维激光雷达获取多组测距数据;将多组所述测距数据转化到二维激光笛卡尔坐标系,获得多个笛卡尔坐标参数;采用加权直线拟合算法,对多个所述笛卡尔坐标参数进行线拟合,得到线段组;确定 全部
背景技术:
移动机器人技术在各行各业中应用广泛,特别是在室内环境中;然而对于包含了 大量的线性结构的室内环境,通用的扫描匹配算法都没有考虑这些长直特性对匹配误差的 影响,因此降低了评估移动机器人所处位置的准确性。
技术实现要素:
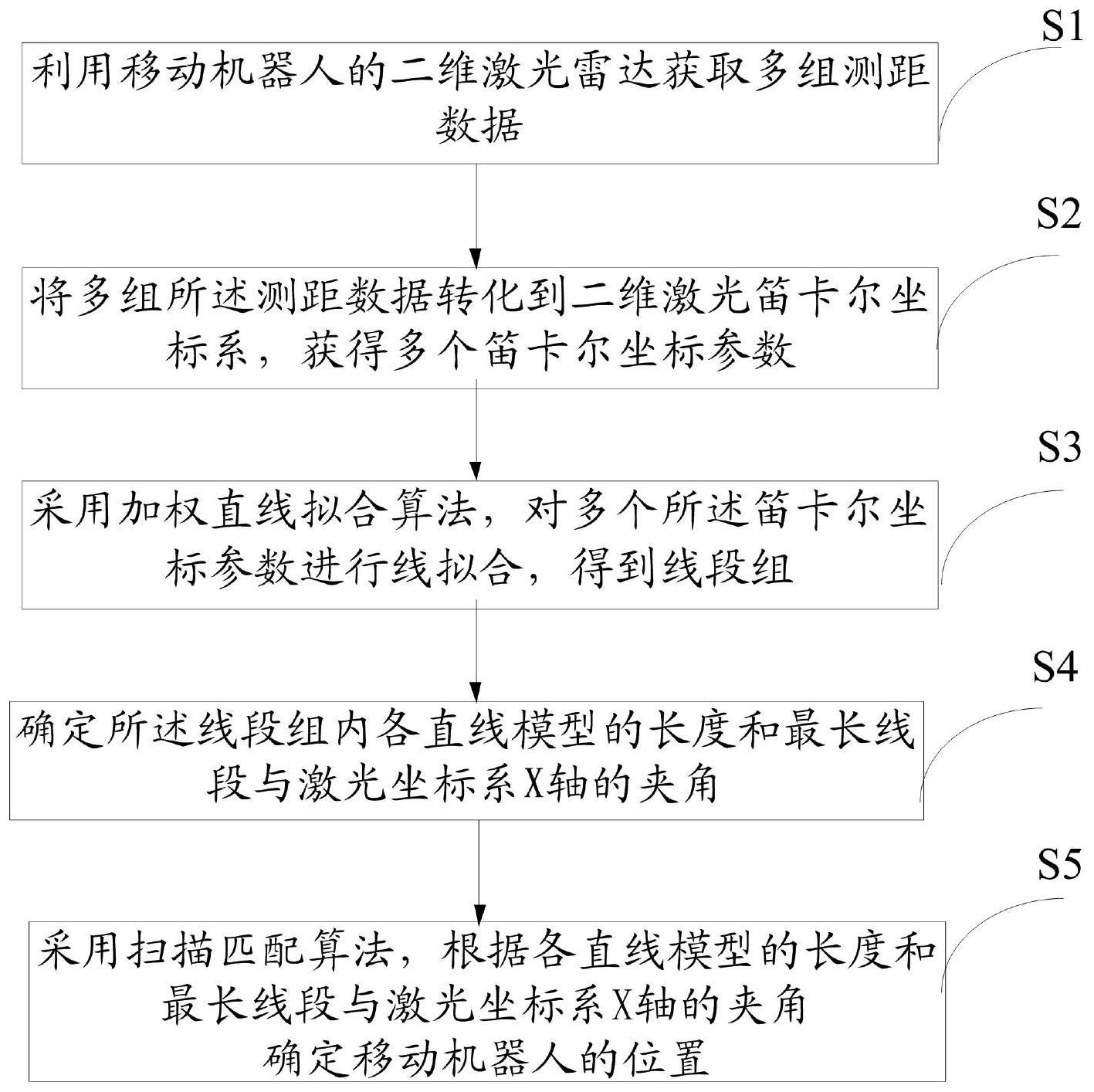
基于此,本发明的目的是提供一种移动机器人所处位置确定方法及系统,以提高 确定移动机器人所处位置的准确性。 为实现上述目的,本发明提供了一种移动机器人所处位置确定方法,所述方法包 括: 步骤S1:利用移动机器人的二维激光雷达获取多组测距数据;所述测距数据包括 移动机器人到障碍物的距离和角度; 步骤S2:将多组所述测距数据转化到二维激光笛卡尔坐标系,获得多个笛卡尔坐 标参数; 步骤S3:采用加权直线拟合算法,对多个所述笛卡尔坐标参数进行线拟合,得到线 段组; 步骤S4:确定所述线段组内各直线模型的长度和最长线段与激光坐标系X轴的夹 角; 步骤S5:采用扫描匹配算法,根据各直线模型的长度和最长线段与激光坐标系X轴 的夹角确定移动机器人的位置。 可选的,所述采用加权直线拟合算法,对多个所述笛卡尔坐标参数进行线拟合,得 到线段组,具体包括: 步骤S31:从多个所述笛卡尔坐标参数中任选两个所述笛卡尔坐标参数确定一条 直线模型; 步骤S32:根据剩余的所述笛卡尔坐标参数到所述直线模型的距离确定剩余的所 述笛卡尔坐标参数的权重; 步骤S33:根据剩余的所述笛卡尔坐标参数的权重更新所述直线模型的参数; 步骤S34:判断是否大于或等于设定个数的所述笛卡尔坐标参数落在更新参数后 的所述直线模型上;如果大于或等于设定个数的所述笛卡尔坐标参数落在更新参数后的所 述直线模型上,则将更新参数后的所述直线模型保存至线段组;如果小于设定个数的所述 笛卡尔坐标参数落在更新参数后的所述直线模型上,则执行步骤S32; 或者,步骤S34:判断迭代次数是否大于等于最大迭代次数;如果迭代次数大于或 5 CN 111595347 A 说 明 书 2/7 页 等于最大迭代次数,则将更新参数后的所述直线模型保存至线段组;如果迭代次数小于最 大迭代次数,则迭代次数加一,并执行步骤S32。 可选的,所述确定所述线段组内各直线模型的长度和最长线段与激光坐标系X轴 的夹角,具体包括: 步骤S41:根据加权直线提取算法,获取所述线段组中各直线模型的首尾端点坐 标; 步骤S42:根据各直线模型的首尾端点坐标确定所有直线模型的长度; 步骤S43:从所有直线模型中选取最长线段; 步骤S44:计算最长线段的斜率; 步骤S45:根据所述斜率计算所述最长线段与激光坐标系X轴的夹角。 可选的,所述将多组所述测距数据转化到二维激光笛卡尔坐标系,获得多个笛卡 尔坐标参数,具体公式为: 其中,x表示笛卡尔坐标参数的横坐标,y表示笛卡尔坐标参数的纵坐标,ρ表示移 动机器人到障碍物的距离,θ表示移动机器人到障碍物的角度。 可选的,所述根据所述斜率计算所述最长线段与激光坐标系X轴的夹角,具体公式 为: 其中, 表示所述最长线段与激光坐标系X轴的夹角,Kmax表示最长线段的斜率。 本发明还提供一种移动机器人所处位置确定系统,所述系统包括: 测距数据获取模块,用于利用移动机器人的二维激光雷达获取多组测距数据;所 述测距数据包括移动机器人到障碍物的距离和角度; 笛卡尔坐标参数确定模块,用于将多组所述测距数据转化到二维激光笛卡尔坐标 系,获得多个笛卡尔坐标参数; 直线拟合模块,用于采用加权直线拟合算法,对多个所述笛卡尔坐标参数进行线 拟合,得到线段组; 长度与夹角确定模块,用于确定所述线段组内各直线模型的长度和最长线段与激 光坐标系X轴的夹角; 位置确定模块,用于采用扫描匹配算法,根据各直线模型的长度和最长线段与激 光坐标系X轴的夹角确定移动机器人的位置。 可选的,所述直线拟合模块,具体包括: 直线模型确定单元,用于从多个所述笛卡尔坐标参数中任选两个所述笛卡尔坐标 参数确定一条直线模型; 权重确定单元,用于根据剩余的所述笛卡尔坐标参数到所述直线模型的距离确定 剩余的所述笛卡尔坐标参数的权重; 参数确定单元,用于根据剩余的所述笛卡尔坐标参数的权重更新所述直线模型的 参数; 6 CN 111595347 A 说 明 书 3/7 页 第一判断单元,用于判断是否大于或等于设定个数的所述笛卡尔坐标参数落在更 新参数后的所述直线模型上;如果大于或等于设定个数的所述笛卡尔坐标参数落在更新参 数后的所述直线模型上,则将更新参数后的所述直线模型保存至线段组;如果小于设定个 数的所述笛卡尔坐标参数落在更新参数后的所述直线模型上,则执行“权重确定单元”; 或者,第一判断单元,用于判断迭代次数是否大于等于最大迭代次数;如果迭代次 数大于或等于最大迭代次数,则将更新参数后的所述直线模型保存至线段组;如果迭代次 数小于最大迭代次数,则迭代次数加一,并执行“权重确定单元”。 可选的,所述长度与夹角确定模块,具体包括: 首尾端点坐标确定单元,用于根据加权直线提取算法,获取所述线段组中各直线 模型的首尾端点坐标; 长度确定单元,用于根据各直线模型的首尾端点坐标确定所有直线模型的长度; 最长线段选取单元,用于从所有直线模型中选取最长线段; 斜率确定单元,用于计算最长线段的斜率; 夹角确定单元,用于根据所述斜率计算所述最长线段与激光坐标系X轴的夹角。 可选的,所述将多组所述测距数据转化到二维激光笛卡尔坐标系,获得多个笛卡 尔坐标参数,具体公式为: 其中,x表示笛卡尔坐标参数的横坐标,y表示笛卡尔坐标参数的纵坐标,ρ表示移 动机器人到障碍物的距离,θ表示移动机器人到障碍物的角度。 可选的,所述根据所述斜率计算所述最长线段与激光坐标系X轴的夹角,具体公式 为: 其中, 表示所述最长线段与激光坐标系X轴的夹角,Kmax表示最长线段的斜率。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 本发明公开一种移动机器人所处位置确定方法及系统,方法包括:利用移动机器 人的二维激光雷达获取多组测距数据;将多组所述测距数据转化到二维激光笛卡尔坐标 系,获得多个笛卡尔坐标参数;采用加权直线拟合算法,对多个所述笛卡尔坐标参数进行线 拟合,得到线段组;确定所述线段组内各直线模型的长度和最长线段与激光坐标系X轴的夹 角;采用扫描匹配算法,根据各直线模型的长度和最长线段与激光坐标系X轴的夹角确定移 动机器人的位置。本发明采用扫描匹配算法对移动机器人的位置进行调整,进而提高了确 定移动机器人所处位置的准确性。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获 得其他的附图。 7 CN 111595347 A 说 明 书 4/7 页 图1为本发明实施例移动机器人所处位置确定方法流程图; 图2为本发明实施例获取多组测距数据示意图; 图3为本发明实施例测距数据转化成笛卡尔坐标参数的示意图; 图4为本发明实施例移动机器人所处位置确定系统结构图。











